|
14576 |

ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
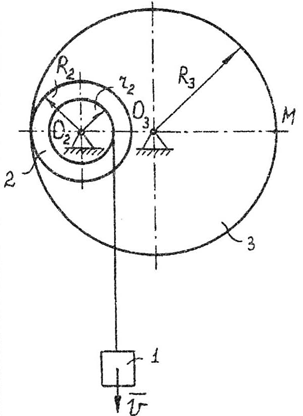
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.9 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.9 |
Теоретическая механика 2 |
300₽ |
|
|
9026 |

КИНЕМАТИКА
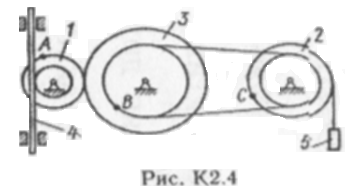
Механизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза S, привязанного к концу нити, намотанной на одно из колес (рис K2.0 — K2 9, табл. K2). Радиусы ступеней колес равны соответственно у колеса 1 — r1 = 2 см, R1 = 4 см, у колеса 2 — r2 = 6 см, R2 = 8 см, у колеса 3 — r3 = 12 см, R3 = 16 см. На ободьях колес расположены точки A, B и C.
| Номер условия |
Дано |
Найти |
| скорости |
ускорения |
| 4 |
φ3 = 3t - t2 |
v4, ω1 |
ε1, aB, a5 |
В столбце «Дано» таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ1(t) — закон вращения колеса 1, S4(t) — закон движения рейки 4, ω2(t) — закон изменения угловой скорости колеса 2, v3(t) — закон изменения скорости груза 5 и т д (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s4, s5 и v4, v5 — вниз.
Определить в момент времени t1 = 2 с указанные в таблице в столбцах «Найти» скорости (v — линейные, ω — угловые) и ускорения (a — линейные, ε — угловые) соответствующих точек или тел (v5— скорость груза 5 и т.д.).
Дано: R1 = 4 см, r1 = 2 см; R2 = 8 см, r2 = 6 см, R3 = 16 см, r3 = 12 см, B — точка обода колеса 3, t1 = 2 с Определить ω1, v4, aB, a5, ε1 в момент времени t = t1.
|
Теоретическая механика |
K2.4. |
Теоретическая механика |
300₽ |
|
|
5116 |
ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Составить уравнение вращения диска турбины при пуске в ход, если угол поворота пропорционален кубу времени и при t1 = 4 с, угловая скорость диска достигла значения ω1 = 96 с-1. Найти скорость и ускорение точки диска в момент времени t2 = 5 с, если расстояние до этой точки от оси вращения равно 0,5 м.
|
Теоретическая механика |
K4.15 |
Теоретическая механика 2 |
300₽ |
|
|
10860 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
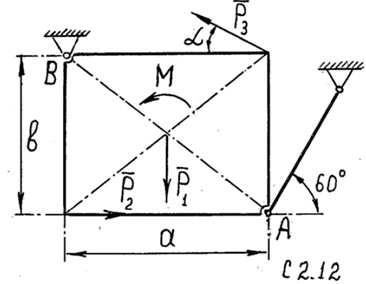
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.12, -исходные данные приведены в таблице 2.
| Номер варианта |
Р1, кН |
P2, кН |
P3, кН |
M кН∙м |
a, м |
b, м |
α, град |
| С-2.12. |
6 |
5 |
6 |
4 |
1.1 |
0.9 |
60° |
|
Теоретическая механика |
C2.12. |
Теоретическая механика 2 |
300₽ |
|
|
5051 |
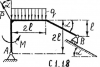
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
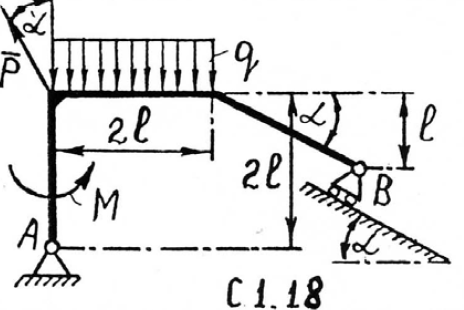
Определить реакции связей заданной плоской конструкции. Схемы конструкций указаны на рисунке С 1.8, исходные данные приведены в табл.
| Номер варианта |
P, кН |
G, кН |
M, кНм |
q, кН/м |
l, м |
α, град. |
| C1.18 |
14 |
- |
6 |
2 |
1 |
30° |
|
Теоретическая механика |
C1.18 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
8572 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = x(t), у = y(t). найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 4.
| Номер варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| K1.16 |
3t2 + 4t |
-2t |
1 |
|
Теоретическая механика |
K1.16_1 |
Теоретическая механика |
300₽ |
|
|
11248 |
КИНЕМАТИКА ТОЧКИ
Точка М движется по окружности радиуса R согласно уравнению S = S(t). Определить и построить для момента времени t1 скорость, касательное, нормальное и полное ускорение этой точки. Исходные данные для расчета приведены в табл. 2.
| № варианта |
S = S(t), cм |
R, см |
Время t1, с |
| К2.5 |
2t |
t2 - 3 |
2 |
|
Теоретическая механика |
K2.5 |
Теоретическая механика 2 |
300₽ |
|
|
14110 |
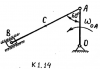
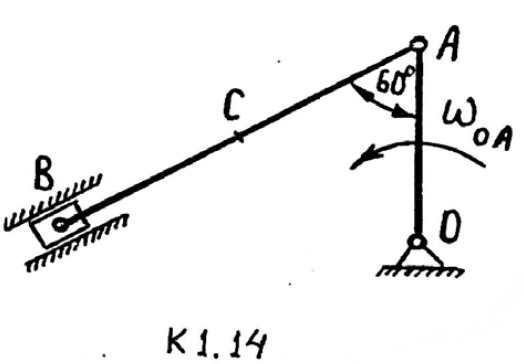
Для заданного механизма найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки.
OA = 30 см; AB = 60 см; AC = 30 см; ωOA = 3 c-1.
|
Теоретическая механика |
K1.14 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
16514 |
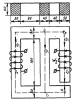
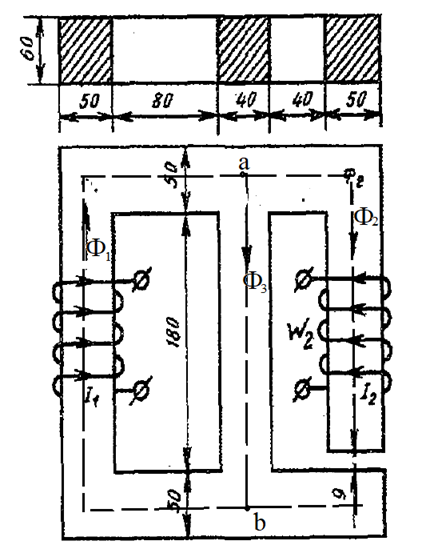
РАСЧЁТ РАЗВЕТВЛЕННОЙ МАГНИТНОЙ ЦЕПИ ПРИ ПОСТОЯННЫХ ТОКАХ
Для магнитной цепи (рис. 5) выполнить следующее:
1. Начертить схему замещения магнитной цепи, указав на ней направления магнитных потоков и магнитодвижущих сил (МДС);
2. Составить для магнитной цепи уравнения по законам Кирхгофа;
3. Определить магнитные потоки в стержнях и значение магнитной индукции в воздушном зазоре.
Размеры магнитопровода на рис. 5 даны в мм. Магнитопровод выполнен из электротехнической стали, кривая намагничивания которой представлена в табл. 2. Величины токов и число витков обмотки для каждого варианта даны в табл. 3.
Таблица 2
| В, Тл |
0 |
0,5 |
0,7 |
0,9 |
1,0 |
1,1 |
1,2 |
1,3 |
1,4 |
1,6 |
1,7 |
1,75 |
| Н, А/м |
0 |
100 |
140 |
200 |
250 |
350 |
500 |
700 |
1000 |
1800 |
2500 |
3000 |
Таблица 3
| Предпоследняя цифра студента |
I1, А |
w1, витков |
w2, витков |
I1, А |
| 0 |
20 |
250 |
18 |
120 |
|
Электротехника |
5-0-6 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
14592 |
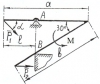
ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.17 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.17 |
Теоретическая механика 2 |
300₽ |
|
|
14758 |
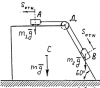
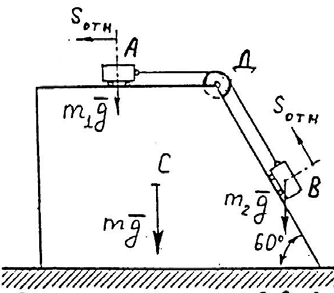
По призме C массой m = 7 кг могут двигаться тележки A и B массами m1 = 1 кг и m2 = 2 кг соответственно. Тележки связаны невесомой нитью, переброшенной через неподвижный блок Д. В начальный момент система находится в покое, затем тележка A начинает двигаться относительно призмы влево по закону Sотн = 5t2 (м). Определить ускорение призмы.
|
Теоретическая механика |
Д9.7 |
Теоретическая механика 2 |
300₽ |
|
|
5125 |
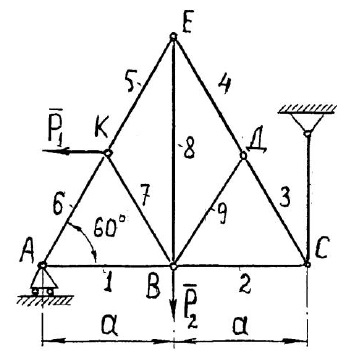
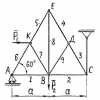 ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. С3.18 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| С3.18 |
2,9,4 |
1,6 |
120 |
140 |
В задаче № С 3.18 нужно принять неподвижный шарнир в точке A.
|
Теоретическая механика |
C3.18_1 |
Теоретическая механика |
300₽ |
|
|
10876 |
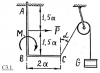
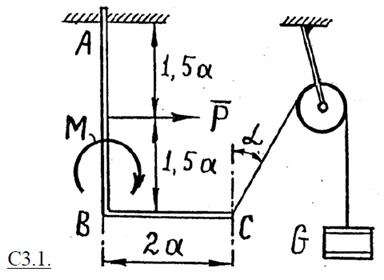
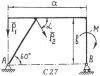
ОПРЕДЕЛЕНИЕ РЕАКЦИИ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Схемы конструкций построены на рис. СЗ. 1 - С3.20. Кронштейн ABC, весом которого пренебрегаем, испытывает действие груза весом G, пары сип с моментом M и силы P. Определить реакции заделки.
G = 4 кН; P = 9 кН; M = 12 кНм; a = 1,5 м; α = 45°.
|
Теоретическая механика |
C3.1. |
Теоретическая механика 2 |
300₽ |
|
|
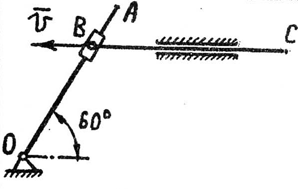
5066 |
Стержень ВС кулисного механизма движется со скоростью v = 1 м/с. Для указанного положения механизма определить угловую скорость кулисы ОА, если расстояние ОВ = 0,7 м
|
Теоретическая механика |
K7.6 |
Теоретическая механика 2 |
300₽ |
|
|
14030 |
При небольших скоростях сила сопротивления движению поезда выражается формулой $R=P+k \cdot v$, где Р и к — постоянные величины, v — скорость поезда. Найти закон движения поезда при его разгоне, если сила тяги электропоезда равна Т, а масса поезда равна m.
|
Теоретическая механика |
Д2.1 |
Теоретическая механика 2 |
300₽ |
|
|
8590 |
ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Маховик вращается вокруг неподвижной оси по закону φ = At3 + Bt2, где φ задан в радианах, а время t - в секундах; A и B – постоянные коэффициенты. В момент времени t1 = 3 с угловая скорость маховика и его угловое ускорение имели значения ω1 = 72 c-1 и ε = 42 c-2. Определить угловое ускорение маховика, а также скорость и ускорение его точки, отстоящей от оси вращения на 20 см в момент времени t2 = 4 c.
|
Теоретическая механика |
K4.13 |
Теоретическая механика 2 |
300₽ |
|
|
11280 |
КИНЕМАТИКА ТОЧКИ
Точка М движется по окружности радиуса R согласно уравнению S = S(t). Определить и построить для момента времени t1 скорость, касательное, нормальное и полное ускорение этой точки. Исходные данные для расчета приведены в табл. 2.
| № варианта |
S = S(t), cм |
R, см |
Время t1, с |
| К2.20 |
2t |
4t2 + 3 |
0,5 |
|
Теоретическая механика |
K2.20 |
Теоретическая механика 2 |
300₽ |
|
|
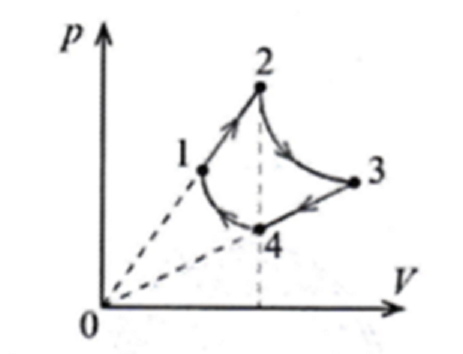
16697 |

Идеальный одноатомный газ из состояния 1 с температурой T1 расширяется в процессе 1-2 прямо пропорциональной зависимости давления p от объема V. В процессе 1-2 давление увеличивается в k = 2 раза. Затем газ расширяется в изотермическом процессе 2-3, сжимается в процессе 3-4 прямо пропорциональной зависимости давления от объёма и сжимается в изотермическом процессе 4-1. Объемы газа в состояниях 2 и 4 равны (рис. 35).
- Найти температуру газа в процессе 2-3
- Найти отношение давлений в состояниях 1 и 3
- Найти молярную теплоёмкость газа в процессе 1-2
|
Молекулярная физика и термодинамика |
|
|
300₽ |
|
|
10962 |
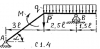
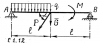
СОСТАВЛЕНИЕ РАСЧЕТНОЙ СХЕМЫ ПЛОСКОЙ КОНСТРУКЦИИ
Используя принцип освобождаемости от связей, освободить плоскую конструкцию от связей и приложить к ней реакции связей. Равномерно-распределенную нагрузку заменить соответствующей равнодействующей силой. Силы, не параллельные осям координат, разложить на составляющие, параллельные осям координат. Построить расчетную схему конструкции. Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. C1.4, исходные данные приведены в табл. 1.
| Номер варианта |
Р, кН |
G, кН |
M, кН∙м |
q, кН∙м |
l, м |
α, град |
| C1.4 |
15 |
- |
3 |
4 |
1 |
45° |
|
Теоретическая механика |
C1.4 |
Теоретическая механика 2 |
300₽ |
|
|
8342 |
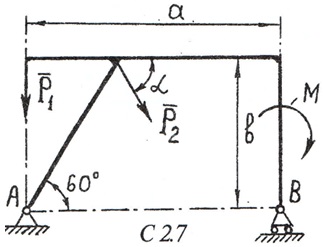
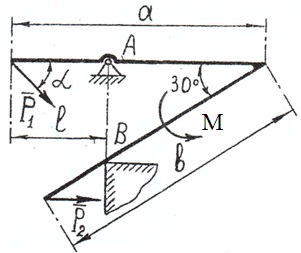
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.7 -исходные данные приведены в таблице 2.
Таблица 2
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С2.7 |
8 |
9 |
4 |
2,4 |
1,4 |
- |
60° |
|
Теоретическая механика |
C2.7 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
11042 |
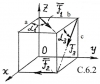
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллелепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C6.2 |
Теоретическая механика 2 |
300₽ |
|
|
14212 |
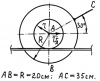
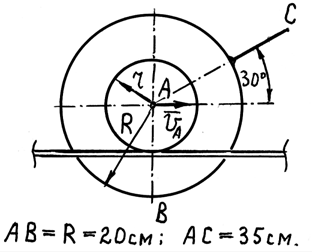
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис.
AB = R = 20 см = 0,20 м; r = 10 см = 0,10 м; AC = 35 см = 0,35 м; vA = 45 см/с = 0,45 м/c.
|
Теоретическая механика |
K6.8 |
Теоретическая механика 2 |
300₽ |
|
|
8426 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.15, -исходные данные приведены в таблице 2.
Таблица 2
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С-2.15 |
9 |
7 |
5 |
2.6 |
2.6 |
1 |
45° |
|
Теоретическая механика |
C2.15 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
11122 |
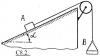
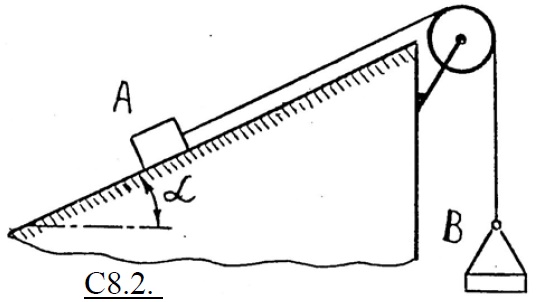
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
Расчетные схемы даны на рис. С8.2. Груз A весом P лежит на наклонной плоскости с углом α. Определить наибольший вес Qmax груза B, при котором возможно равновесие, если коэффициент трения между грузом A и плоскостью равен f.
|
Теоретическая механика |
C8.2 |
Теоретическая механика 2 |
300₽ |
|
|
14298 |

Барабан массой т и радиусом r приводится во вращательное движение из состояния покоя моментом М. Определить ускорение поднимаемого с помощью троса груза массой m1. Барабан считать однородным цилиндром, массой троса пренебречь.
|
Теоретическая механика |
Д7.20 |
Теоретическая механика 2 |
300₽ |
|
|
12360 |
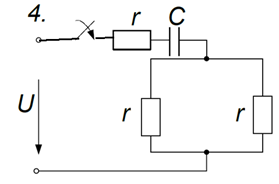
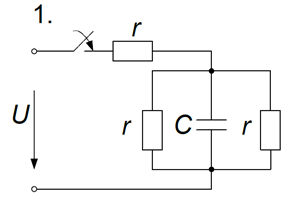
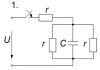
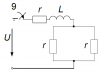
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 7 |
30 |
- |
125 |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
174 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
8524 |
ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. С3.16 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| С3.19 |
7, 10, 2 |
5, 4 |
170 |
200 |
|
Теоретическая механика |
C3.19-20 |
Теоретическая механика |
300₽ |
|
|
11202 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.2 |
3cosπt |
4sinπt |
5/6 |
|
Теоретическая механика |
K1.2 |
Теоретическая механика 2 |
300₽ |
|
|
12440 |
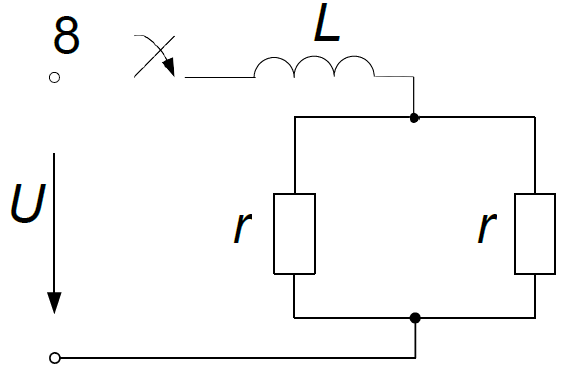
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 2 |
25 |
100 |
- |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
128 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
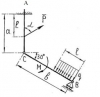
18264 |

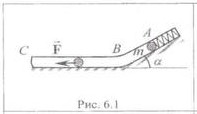
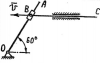
Шарик массы m движется из положения A внутри изогнутой трубки, расположенной в вертикальной плоскости. Шарик, пройдя путь l0, отделяется oт пружины. В точке B шарик, не меняя значения своей скорости, переходит на участок BC, где на него дополнительно действует переменная сила F, направление которой указано на рисунке. Пользуясь общими теоремами динамики точки, определить скорость шарика в положениях B и C. В задании принята следующие обозначения: vA - начальная скорость шарика, AB - длина участка, τ - время движения на участке BC, f - коэффициент трения скольжения шарика по стенке трубки, c - коэффициент жесткости пружины.
| № |
Рис. |
m |
vA |
f |
AB |
l0 |
c |
α |
β |
τ |
F(t) |
| 17 |
|
кг |
м/с |
|
м |
см |
Н/см |
град |
с |
Н |
| 6.1 |
0,6 |
0 |
0,12 |
0,5 |
15 |
0,9 |
60 |
- |
1,2 |
- |
|
Механика |
|
|
300₽ |
|
|
9704 |
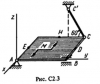
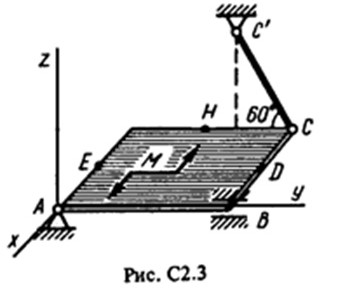
Однородная прямоугольная плита весом P = 5 кН со сторонами AB = 3l = 2,4 м, BC = 2l = 2∙0,8 = 1,6 м закреплена в точке A сферическим шарниром, а в точке B цилиндрическим шарниром (подшипником) и удерживается в равновесии невесомым стержнем СС’ (рис. C2.4)
|
Теоретическая механика |
|
|
300₽ |
|
|
16705 |
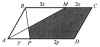
Какую часть площади параллелограмма составляет площадь заштрихованной фигуры?
|
Геометрия |
|
|
300₽ |
|
|
10978 |
СОСТАВЛЕНИЕ РАСЧЕТНОЙ СХЕМЫ ПЛОСКОЙ КОНСТРУКЦИИ
Используя принцип освобождаемости от связей, освободить плоскую конструкцию от связей и приложить к ней реакции связей. Равномерно-распределенную нагрузку заменить соответствующей равнодействующей силой. Силы, не параллельные осям координат, разложить на составляющие, параллельные осям координат. Построить расчетную схему конструкции. Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. C1.12, исходные данные приведены в табл. 1.
| Номер варианта |
Р, кН |
G, кН |
M, кН∙м |
q, кН∙м |
l, м |
α, град |
| C1.12 |
15 |
12 |
8 |
1 |
1,5 |
60° |
|
Теоретическая механика |
C1.12 |
Теоретическая механика 2 |
300₽ |
|
|
11058 |
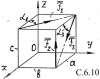
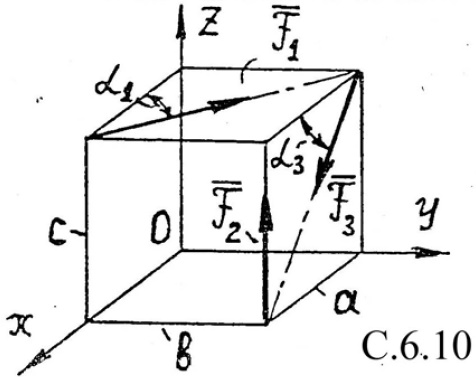
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C6.10 |
Теоретическая механика 2 |
300₽ |
|
|
9920 |
Два контура в виде равностороннего треугольника и окружности радиусом 20 см расположены в двух взаимно перпендикулярных плоскостях. Центр окружности совпадает с одной из вершин треугольника. Сторона треугольника равна 20 см. В контурах протекают равные по величине токи силой 5 А. Определить (в мкТл) значение магнитной индукции в точке, совпадающей с центром окружности.
|
Электромагнетизм |
|
|
300₽ |
|
|
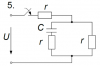
12294 |
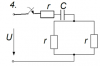
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
Таблица № 1
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 4 |
40 |
- |
250 |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электроника |
141 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
8446 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. С2.2, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С2.2 |
6 |
4 |
2 |
1.3 |
2.5 |
1 |
60° |
|
Теоретическая механика |
C2.2_1 |
Теоретическая механика |
300₽ |
|
|
5561 |
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C2.10. |
МИИТ. Теоретическая механика. 2014 год |
300₽ |
|
|
11138 |
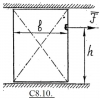
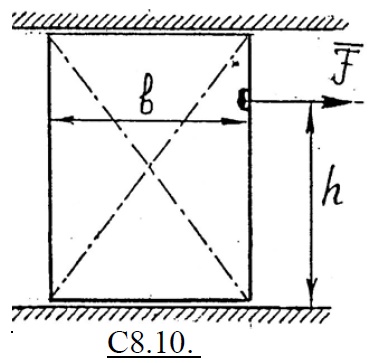
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
Расчетные схемы даны на рис. С8.10. Дверь в купе железнодорожного вагона может скользить в горизонтальных желобах, расположенных сверху и снизу. Коэффициент трения между дверью и нижним желобом равен f. Центр тяжести двери лежит на оси симметрии. Найти наибольшую высоту h ручки двери, при которой дверь не будет перекашиваться в желобах, если ее вес равен G, а ширина равна b.
|
Теоретическая механика |
C8.10 |
Теоретическая механика 2 |
300₽ |
|
|
12376 |
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 6 |
10 |
- |
150 |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
165 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
8542 |

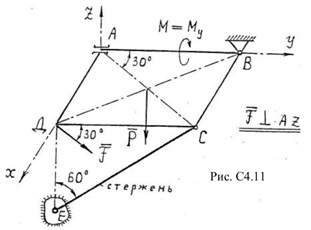
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунках С4.11.
|
Теоретическая механика |
C4.11_1 |
Теоретическая механика |
300₽ |
|
|
11218 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.10 |
3sin(πt/2) |
4cos(πt/2) |
0,5 |
|
Теоретическая механика |
K1.10 |
Теоретическая механика 2 |
300₽ |
|
|
12456 |
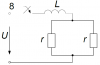
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 1 |
15 |
120 |
- |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
119 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
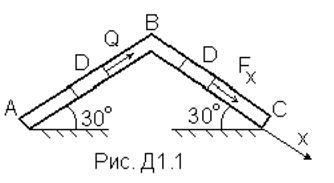
14798 |
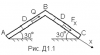
Груз D массой m, получив в точке A начальную скорость v0, движется в изогнутой трубе АВС, расположенной в вертикальной плоскости; участки трубы или оба наклонные, или один горизонтальный, а другой наклонный (рис.3.1, табл. 3.2).
На участке АВ на груз кроме силы тяжести действуют постоянная сила Q (ее направление показано на рисунках).
В точке B груз, не изменяя своей скорости, переходит на участок BC трубы, где на него кроме силы тяжести действует переменная сила F, проекция которой Fx на ось х задана в таблице.
Считая груз материальной точкой и зная время t1 движения груза от точки A до точки B, найти скорость груза на участке BC через t2 = 2 сек. после выхода из точки B. Трением груза о трубу пренебречь.
| Вариант |
m, кг |
v0, м/c |
Q, Н |
t1, с |
Fx, Н |
| 1 |
2 |
20 |
6 |
2,5 |
2t2 |
|
Теоретическая механика |
Д1-1 |
Методичка по термеху. Нижний Новгород. 2019 год |
300₽ |
|
|
6355 |

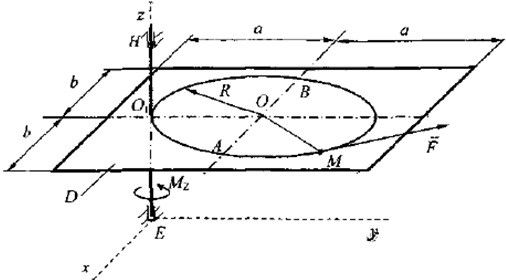
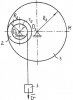
ПРИМЕНЕНИЕ УРАВНЕНИЙ ЛАГРАНЖА ВТОРОГО РОДА К ИЗУЧЕНИЮ ДВИЖЕНИЯ МЕХАНИЧЕСКОЙ СИСТЕМЫ С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ
Тело D массой m1 = 20 кг вращается вокруг вертикальной оси O1z под действием пары сил с моментом Mz = 30∙t2 Н∙м. Расчетная схема изображена на рисунке. При этом по желобу тела D под действием внутренней силы F = 0,6∙cos(π∙t) Н, направленной по касательной к желобу (управляющее воздействие), движется материальная точка М массой m2 = 8 кг. Согласно закону равенства действия и противодействия с такой же по величине силой, но направленной в противоположную сторону, точка М действует на тело D.
Используя уравнения Лагранжа второго рода составить дифференциальные уравнения движения механической системы в обобщенных координатах. Сопротивлением движению пренебречь.
|
Теоретическая механика |
|
|
300₽ |
|
|
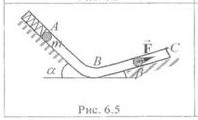
18272 |

Шарик массы m движется из положения A внутри изогнутой трубки, расположенной в вертикальной плоскости. Шарик, пройдя путь l0, отделяется oт пружины. В точке B шарик, не меняя значения своей скорости, переходит на участок BC, где на него дополнительно действует переменная сила F, направление которой указано на рисунке. Пользуясь общими теоремами динамики точки, определить скорость шарика в положениях B и C. В задании принята следующие обозначения: vA - начальная скорость шарика, AB - длина участка, τ - время движения на участке BC, f - коэффициент трения скольжения шарика по стенке трубки, c - коэффициент жесткости пружины.
| № |
Рис. |
m |
vA |
f |
AB |
l0 |
c |
α |
β |
τ |
F(t) |
| 13 |
|
кг |
м/с |
|
м |
см |
Н/см |
град |
с |
Н |
| 6.5 |
0,3 |
0 |
0,05 |
0,3 |
20 |
1,9 |
45 |
15 |
1,2 |
1,5(1-t/3) |
|
Механика |
|
|
300₽ |
|
|
9720 |

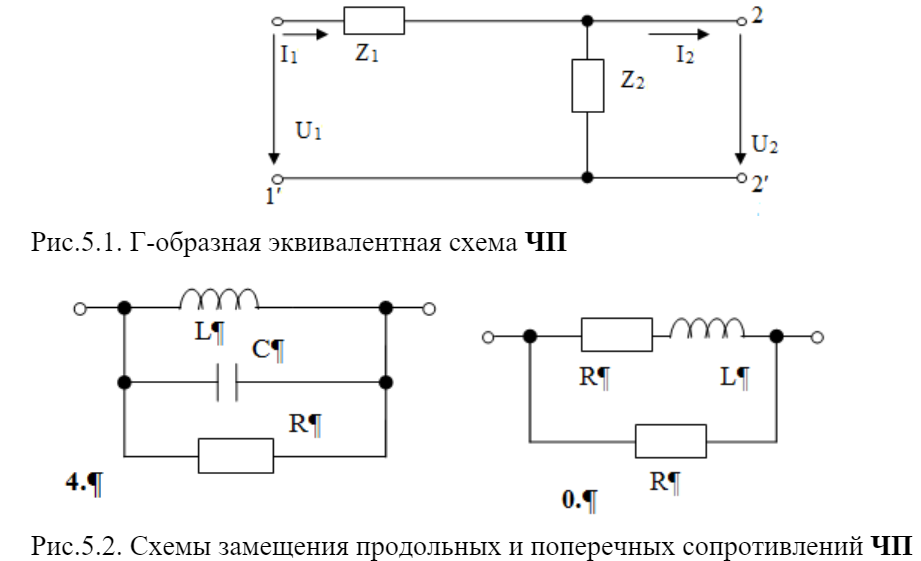
ЗАДАНИЕ № 3 «РАСЧЕТ ЧЕТЫРЁХПОЛЮСНИКА»
На рис. 5.1 представлена Г-образная эквивалентная схема четырёхполюсника (ЧП), где Z1 – продольное сопротивление, Z2 – поперечное сопротивление.
Выполнить следующее:
1) начертить исходную схему ЧП;
2) свести полученную схему ЧП к Г-образной эквивалентной схеме ЧП, заменив трёхэлементные схемы замещения продольного и поперечного сопротивлений двухэлементными схемами: Z1 = R1 + jX1, Z2 = R2 + jX2. Дальнейший расчёт вести для эквивалентной схемы;
3) определить коэффициенты A – формы записи уравнений ЧП;
4) определить сопротивления холостого хода и короткого замыкания со стороны первичных (11’) и вторичных выводов (22’):
а) через A – параметры;
б) непосредственно через продольное и поперечное сопротивления для режимов холостого хода и короткого замыкания на соответствующих выводах;
5) определить характеристические сопротивления для выводов 11’ и 22’ и постоянную передачи ЧП;
6) определить комплексный коэффициент передачи по напряжению и передаточную функцию ЧП;
Таблица 5.1. Параметры элементов продольного и поперечного сопротивлений ЧП
| Номер строки |
R, Ом |
L, мГ |
C, мкФ |
f0, кГц |
| 2 |
30 |
50 |
5 |
30 |
|
Электротехника |
|
|
300₽ |
|
|
10994 |

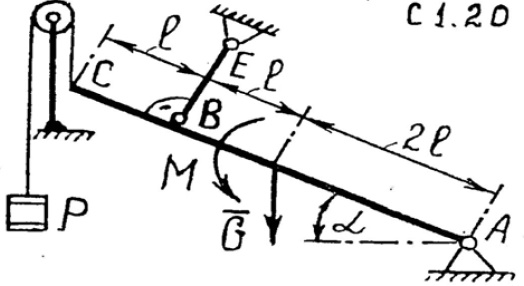
СОСТАВЛЕНИЕ РАСЧЕТНОЙ СХЕМЫ ПЛОСКОЙ КОНСТРУКЦИИ
Используя принцип освобождаемости от связей, освободить плоскую конструкцию от связей и приложить к ней реакции связей. Равномерно-распределенную нагрузку заменить соответствующей равнодействующей силой. Силы, не параллельные осям координат, разложить на составляющие, параллельные осям координат. Построить расчетную схему конструкции. Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. C1.20, исходные данные приведены в табл. 1.
| Номер варианта |
Р, кН |
G, кН |
M, кН∙м |
q, кН∙м |
l, м |
α, град |
| C1.20 |
15 |
10 |
50 |
- |
1 |
30° |
|
Теоретическая механика |
C1.20 |
Теоретическая механика 2 |
300₽ |
|
|
8376 |

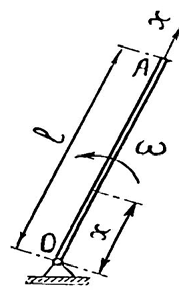
ПРИНЦИП ДАЛАМБЕРА
Тонкий однородный стержень ОА массой m и длиной l, расположенный в горизонтальной плоскости, вращается с постоянной угловой скоростью ω вокруг вертикальной оси О. Определить продольное растягивающее усилие в сечении стержня в функции его координаты х.
|
Теоретическая механика |
Д6.17 |
Теоретическая механика 2 |
300₽ |
|
|
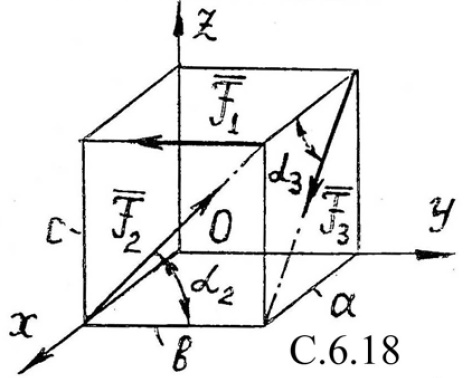
11074 |
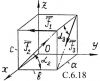
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C6.18 |
Теоретическая механика 2 |
300₽ |
|