|
11042 |
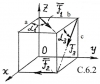
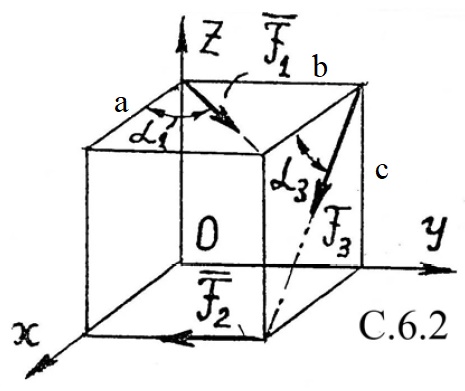
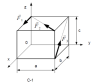
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллелепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C6.2 |
Теоретическая механика 2 |
300₽ |
|
|
8510 |
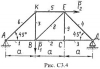
ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
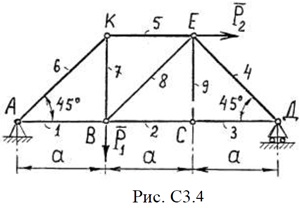
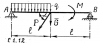
Определить усилия в стержнях плоской фермы рис. С3.4 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| С3.4 |
2, 8, 5 |
3, 4 |
70 |
90 |
|
Теоретическая механика |
C3.4_1 |
Теоретическая механика |
300₽ |
|
|
11122 |
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
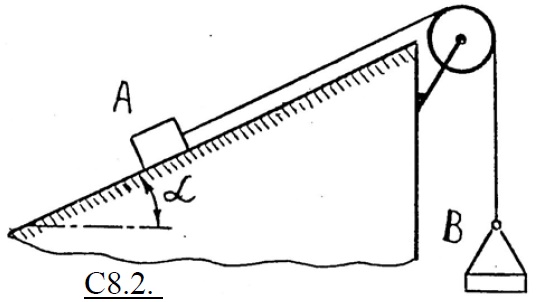
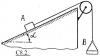
Расчетные схемы даны на рис. С8.2. Груз A весом P лежит на наклонной плоскости с углом α. Определить наибольший вес Qmax груза B, при котором возможно равновесие, если коэффициент трения между грузом A и плоскостью равен f.
|
Теоретическая механика |
C8.2 |
Теоретическая механика 2 |
300₽ |
|
|
8246 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
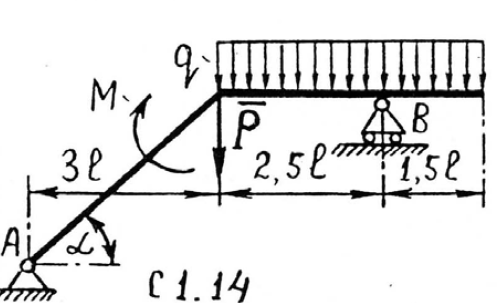
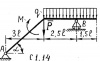
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. C1.14, исходные данные приведены в табл. 1.
| Номер варианта |
P, кН |
G, кН |
M, кНм |
q, кН/м |
l, м |
α, град |
| C1.14 |
15 |
- |
3 |
4 |
1 |
45° |
|
Теоретическая механика |
C1.14 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
8598 |
ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Тело начинает вращаться равноускоренно из состояния покоя. В тот момент, когда его угловая скорость численно равна углу поворота, оно делает 120 об/мин. Чему равно угловое ускорение тела и сколько оборотов оно сделало за первые 15 с? Найти линейную скорость точки тела, а также ее нормальное, касательное и полное ускорения в указанный момент времени при условии, что точка находится от оси вращения на расстоянии 0.4 м.
|
Теоретическая механика |
K4.20 |
Теоретическая механика 2 |
300₽ |
|
|
8422 |

ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
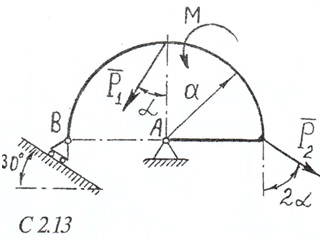
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.13, -исходные данные приведены в таблице 2.
Таблица 2
| Номер варианта |
Р, кН |
М, кН∙м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С-2.13 |
12 |
10 |
6 |
1 |
- |
- |
30° |
|
Теоретическая механика |
C2.13 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
8688 |

ПРИНЦИП ДАЛАМБЕРА
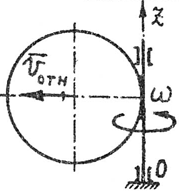
Однородная проволочная полуокружность массой m радиусом R вращается с постоянной угловой скоростью ω вокруг оси ОА (оси Оу). Определить реакции в точках крепления В и D кольца к стержню OA. Расстояние от центра тяжести полукольца до оси ОA: $$x_C=\frac{2R}{3\pi}$$.
|
Теоретическая механика |
Д6.3 |
Теоретическая механика 2 |
300₽ |
|
|
14620 |

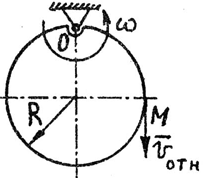
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По диаметру диска, вращающегося вокруг вертикальной оси 0Z с угловой скоростью ω = 3t2 с-1, движется точка М пo закону Sотн = 0,6t2 м с-2. Определить абсолютную скорость точки М в момент времени t = 1 с.
|
Теоретическая механика |
K7.16 |
Теоретическая механика 2 |
300₽ |
|
|
9708 |
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
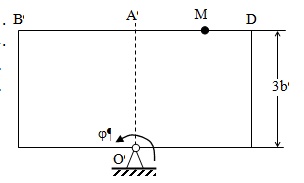
Прямоугольная пластина (рис. К4.3) вращается вокруг неподвижной оси с постоянной угловой скоростью ω = -3 с-1 заданной в табл. К3 (при знаке минус направление ω противоположно показанному на рисунке).
Ось вращения на рис K4.3 ось вращения OO1 лежит в плоскости пластины (пластина вращается в пространстве)
| № усл |
ω, с-1 |
Рис. 0-5 |
| b, см |
S = AM = f(t) |
| 0 |
-2 |
16 |
60∙(t4 - t2) + 56 |
По пластине вдоль прямой BD (рис K4.3) движется точка M. Закон ее относительного движения, выражаемый уравнением $s = AM = 60(t^4 - t^2) + 56$ (s — в сантиметрах, t — в секундах), задан в табл. K4 отдельно для рис. K4.3. На всех рисунках точка M показана в положении, при котором s = AM > 0 (при s > 0 точка М находится по другую сторону от точки А).
Определить абсолютную скорость и абсолютное ускорение точки M в момент времени t1 = 1 с.
|
Теоретическая механика |
|
|
300₽ |
|
|
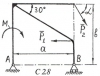
10898 |

ОПРЕДЕЛЕНИЕ РЕАКЦИИ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
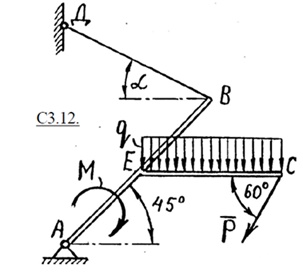
Схемы конструкций построены на рис. СЗ. 1 - С3.20. Кронштейн ABC, нагруженный силой P, распределенной нагрузкой интенсивностью q и парой сил с моментом M, удерживается под углом 45° к горизонту тросом BD. Найти натяжение троса и реакцию шарнира А. P = 15 кН; q = 10 кH/м; M = 9 кН м; AE = EB = 2 м; EC = 3 м; α = 45°.
|
Теоретическая механика |
C3.12. |
Теоретическая механика 2 |
300₽ |
|
|
10978 |
СОСТАВЛЕНИЕ РАСЧЕТНОЙ СХЕМЫ ПЛОСКОЙ КОНСТРУКЦИИ
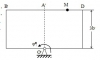
Используя принцип освобождаемости от связей, освободить плоскую конструкцию от связей и приложить к ней реакции связей. Равномерно-распределенную нагрузку заменить соответствующей равнодействующей силой. Силы, не параллельные осям координат, разложить на составляющие, параллельные осям координат. Построить расчетную схему конструкции. Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. C1.12, исходные данные приведены в табл. 1.
| Номер варианта |
Р, кН |
G, кН |
M, кН∙м |
q, кН∙м |
l, м |
α, град |
| C1.12 |
15 |
12 |
8 |
1 |
1,5 |
60° |
|
Теоретическая механика |
C1.12 |
Теоретическая механика 2 |
300₽ |
|
|
5087 |

СОСТАВЛЕНИЕ РАСЧЕТНОЙ СХЕМЫ ПЛОСКОЙ КОНСТРУКЦИИ
Используя принцип освобождаемости от связей, освободить плоскую конструкцию от связей и приложить к ней реакции связей. Равномерно-распределенную нагрузку заменить соответствующей равнодействующей силой. Силы, не параллельные осям координат, разложить на составляющие, параллельные осям координат. Построить расчетную схему конструкции. Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. C1.20, исходные данные приведены в табл. 1.
| Номер варианта |
Р, кН |
G, кН |
M, кН∙м |
q, кН∙м |
l, м |
α, град |
| C1.19 |
15 |
10 |
50 |
- |
1 |
30° |
|
Теоретическая механика |
C1.19 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
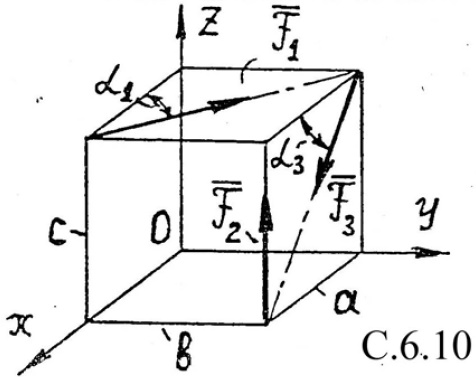
11058 |
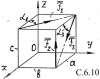
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C6.10 |
Теоретическая механика 2 |
300₽ |
|
|
8528 |

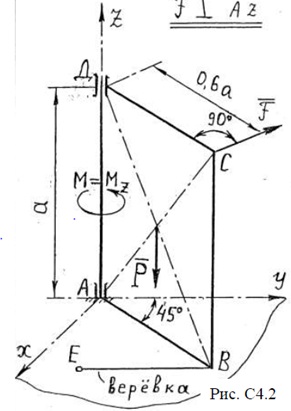
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунках С4.2.
|
Теоретическая механика |
C4.2_1 |
Теоретическая механика |
300₽ |
|
|
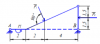
8344 |
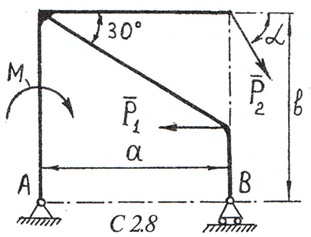
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.8 -исходные данные приведены в таблице 2.
Таблица 2
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С2.8 |
2 |
5 |
12 |
1,8 |
1,8 |
- |
60° |
|
Теоретическая механика |
C2.8 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
8614 |

ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
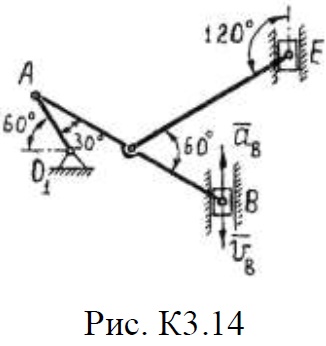
На рис. К3.14 показана схема механизма, причем
О1А = L1 = 0,4 м;
АВ = L2 = 1,4 м;
ДE = L3 = 1,2 м;
O2В = L4 = 0,6 м;
АД = ДВ.
Ползун в данном положении механизма имеет скорость VB = 4 м/с и ускорение aB = 6 м/с2. Для заданного положения механизма построить мгновенные центры скоростей шатунов АВ и ДЕ, найти скорости точек А, Д, Е, угловые скорости указанных шатунов и кривошипа О1А, а также ускорение точки А.
|
Теоретическая механика |
K5.14 |
Теоретическая механика 2 |
300₽ |
|
|
10640 |
Определение реакций опор составной конструкции (система двух тел)
Найти реакции опор и давление в промежуточном шарнире составной конструкции. Схемы конструкций представлены на рис. 18-20 (размеры в метрах), нагрузка указана в табл. 4.
| Вариант |
G |
P |
M, кН∙м |
q, кН∙м |
| кН |
| 2 |
5 |
8 |
60 |
- |
|
Теоретическая механика |
|
|
300₽ |
|
|
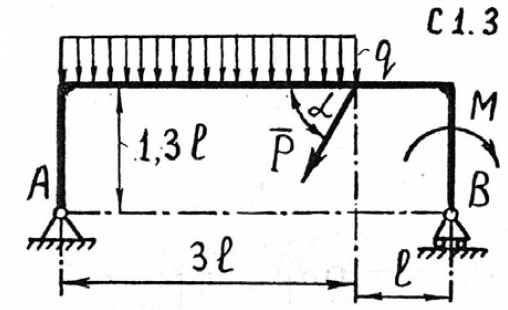
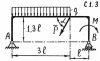
10914 |
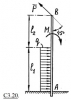
ОПРЕДЕЛЕНИЕ РЕАКЦИИ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
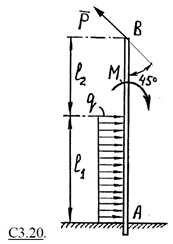
Схемы конструкций построены на рис. СЗ. 1 - С3.20.
Столб AB нагружен силой P, распределенной нагрузкой интенсивности q и парой сил с моментом M. Определить реакции заделки.
P = 30 кH; q = 2 кН/м; M = 50 кН м; 11 = 4 м; 12 = 3 м.
|
Теоретическая механика |
C3.20. |
Теоретическая механика 2 |
300₽ |
|
|
3283 |

ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ.
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунке.
|
Теоретическая механика |
C4.7_1 |
Теоретическая механика |
300₽ |
|
|
10994 |
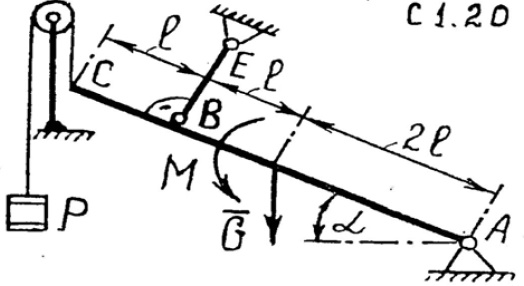
СОСТАВЛЕНИЕ РАСЧЕТНОЙ СХЕМЫ ПЛОСКОЙ КОНСТРУКЦИИ
Используя принцип освобождаемости от связей, освободить плоскую конструкцию от связей и приложить к ней реакции связей. Равномерно-распределенную нагрузку заменить соответствующей равнодействующей силой. Силы, не параллельные осям координат, разложить на составляющие, параллельные осям координат. Построить расчетную схему конструкции. Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. C1.20, исходные данные приведены в табл. 1.
| Номер варианта |
Р, кН |
G, кН |
M, кН∙м |
q, кН∙м |
l, м |
α, град |
| C1.20 |
15 |
10 |
50 |
- |
1 |
30° |
|
Теоретическая механика |
C1.20 |
Теоретическая механика 2 |
300₽ |
|
|
5096 |
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
Шар весом Р, лежащий на пружине с коэффициентом жѐсткости с, вызывает статическую осадку пружины 0,025 м. Какова будет осадка пружины, если тот же шар упадѐт на пружину с высоты h = 0,1 м. Массой пружины пренебречь.
|
Теоретическая механика |
Д3.9 |
Теоретическая механика 2 |
300₽ |
|
|
8448 |

ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
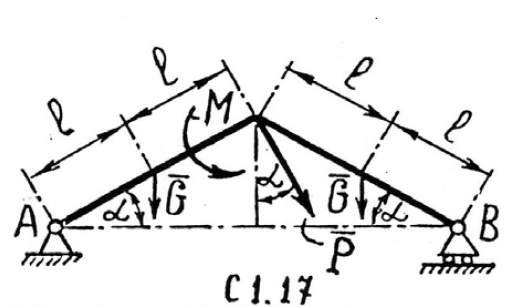
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. С 1.17, исходные данные приведены в табл. 1.
| Номер варианта |
P, кН |
G, кН |
M, кНм |
q, кН/м |
l, м |
α, град |
| C1.17 |
20 |
14 |
4 |
- |
1 |
30° |
|
Теоретическая механика |
C1.17 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
11074 |
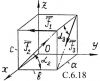
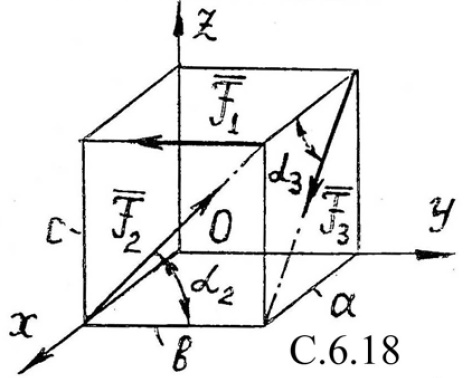
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C6.18 |
Теоретическая механика 2 |
300₽ |
|
|
6357 |

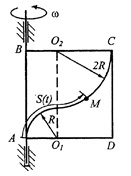
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По заданным уравнениям относительного движения точки S = S(t) по переносящему телу и угловой скорости ω = ω(t) этого тела приведенным в таблице, найти абсолютную скорость и абсолютное ускорение точки М в момент времени t1. Варианты расчетных схем изображены на рисунке.
| Номер варианта |
№ Дано |
ω(t), рад/с |
S(t), см |
R, см |
a, см |
t, сек |
| 29 |
1 |
3t |
10∙π∙sin2(π∙t) |
15 |
- |
1/3 |
Точка M пластины движется по дуге окружности радиуса R = 0,15 м вращается вокруг стороны квадрата AB с угловой скоростью ω = 3∙t (рад/с). По дуге окружности точка М двигается согласно уравнению AM = S(t) = 10∙π∙sin2(π∙t) (см). Определить абсолютные скорость и ускорение точки в момент времени t1 =1/3 (с).
|
Теоретическая механика |
D1.18 |
Теоретическая механика |
300₽ |
|
|
8544 |
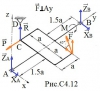
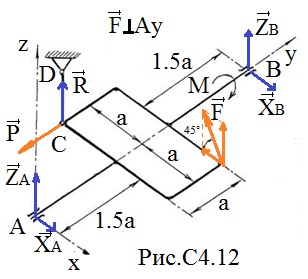
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунках С4.12.
|
Теоретическая механика |
C4.12_1 |
Теоретическая механика |
300₽ |
|
|
8360 |

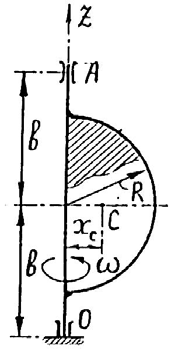
ПРИНЦИП ДАЛАМБЕРА
Однородный полукруг массой m и радиусом R вращается с постоянной угловой скоростью ω вокруг оси ОА (оси Оу). Определить реакции подпятника О и подшипника А. Расстояние от центра тяжести полукруга до оси Оу Rх = 4/3πR.
|
Теоретическая механика |
D2.16 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
8630 |
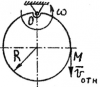
Точка М движется по ободу диска радиуса R = 0,2 м согласно уравнению ОМ = 3t2 + 2t м. Определить абсолютную скорость точки М в указанном положении, если закон вращения диска φ = 2t рад.
|
Теоретическая механика |
K7.12 |
Теоретическая механика 2 |
300₽ |
|
|
14568 |

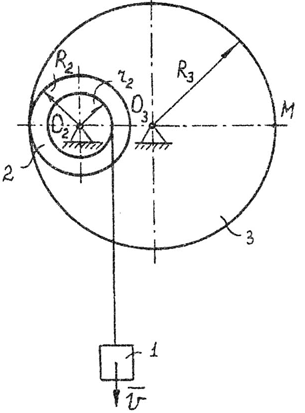
ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
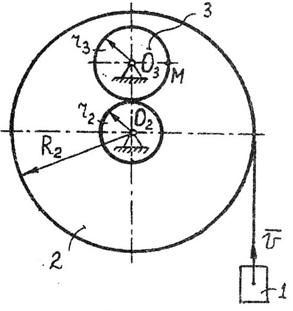
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.5 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.5 |
Теоретическая механика 2 |
300₽ |
|
|
8792 |
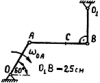
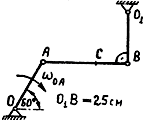
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис.
OA = 25 см = 0,25 м; AB = 40 см = 0,40 м; AC = 25 см = 0,25 м; ωOA = 5 c-1; OB1 = 25 см.
|
Теоретическая механика |
K6.9 |
Теоретическая механика 2 |
300₽ |
|
|
10850 |
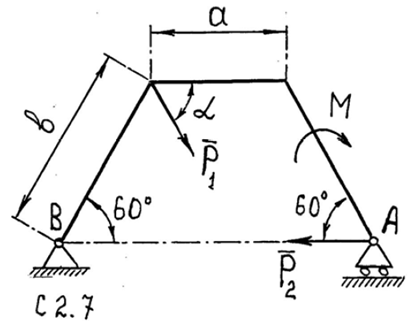
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.7, -исходные данные приведены в таблице 2.
| Номер варианта |
Р1, кН |
P2, кН |
P3, кН |
M кН∙м |
a, м |
b, м |
α, град |
| С-2.7. |
3 |
4 |
0 |
7 |
0.6 |
0.9 |
60° |
|
Теоретическая механика |
C2.7. |
Теоретическая механика 2 |
300₽ |
|
|
10930 |
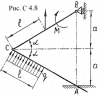
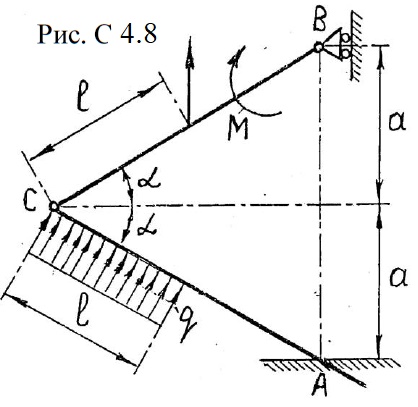
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. C4.8, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| C4.8 |
4 |
4 |
3 |
3 |
2.5 |
1.5 |
30° |
|
Теоретическая механика |
C4.8 |
Теоретическая механика 2 |
300₽ |
|
|
3292 |
 Груз массы m2 поднимают вверх при помощи троса и лебедки, к барабану которой приложена пара сил с моментом М. Найти уравнение движения груза, если в начальный момент он был неподвижен. Момент пары сил выражается зависимостью M = M0 + α∙t (α = const), причем M0 = m2∙g∙R, где R - радиус барабана. Груз массы m2 поднимают вверх при помощи троса и лебедки, к барабану которой приложена пара сил с моментом М. Найти уравнение движения груза, если в начальный момент он был неподвижен. Момент пары сил выражается зависимостью M = M0 + α∙t (α = const), причем M0 = m2∙g∙R, где R - радиус барабана.
|
Теоретическая механика |
D5.7 |
Теоретическая механика |
300₽ |
|
|
11010 |

ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. C5.6 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| C5.6 |
2,7,4 |
1,5 |
110 |
70 |
|
Теоретическая механика |
C5.6 |
Теоретическая механика 2 |
300₽ |
|
|
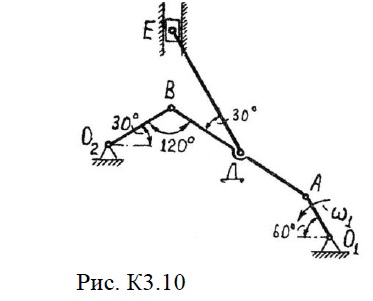
5105 |
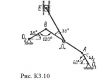 ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
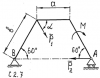
На рис. К3.10 показаны схемы механизмов, причем
О1А = L1 = 0,4 м;
АВ = L2 = 1,4 м;
ДE = L3 = 1,2 м;
O2В = L4 = 0,6 м;
АД = ДВ.
Кривошип O1А вращается вокруг оси O1 с постоянной угловой скоростью ω1 = ωOA = 4 с-1. Для заданного положения механизма построить мгновенные центры скоростей шатунов АВ и ДЕ, найти скорости точек А, В, Д, Е, угловые скорости указанных шатунов и кривошипа О2В, а также ускорение точки В.
|
Теоретическая механика |
K5.10 |
Теоретическая механика 2 |
300₽ |
|
|
8476 |
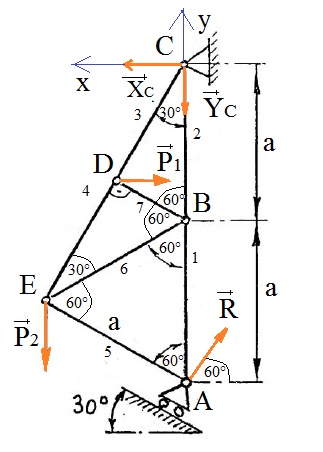
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. С 1.13, исходные данные приведены в табл. 1.
| Номер варианта |
P, кН |
G, кН |
M, кНм |
q, кН/м |
l, м |
α, град |
| С1.3 |
8 |
- |
3 |
6 |
1 |
60° |
|
Теоретическая механика |
C1.3 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
11090 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунке.
|
Теоретическая механика |
C7.6 |
Теоретическая механика 2 |
300₽ |
|
|
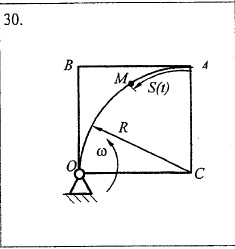
6399 |

СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По заданным уравнениям относительного движения точки S = S(t) по переносящему телу и угловой скорости ω = ω(t) этого тела приведенным в таблице, найти абсолютную скорость и абсолютное ускорение точки М в момент времени t1. Варианты расчетных схем изображены на рисунке.
| Номер варианта |
№ Дано |
ω(t), рад/c |
S(t), см |
R, см |
a, см |
t, сек |
| 30 |
2 |
-πt |
π(3+cos(2πt)) |
10 |
- |
1/3 |
Точка M пластины движется по дуге окружности радиуса R = 0,15 м вращается вокруг стороны квадрата AB с угловой скоростью ω = 3∙t (рад/с). По дуге окружности точка М двигается согласно уравнению AM = S(t) = 10∙π∙sin2(π∙t) (см). Определить абсолютные скорость и ускорение точки в момент времени t1 = 1/3 (с).
|
Теоретическая механика |
|
|
300₽ |
|
|
8560 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = x(t), у = y(t). найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 4.
| Номер варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| K1.5 |
2∙t |
t2 - 3 |
2 |
|
Теоретическая механика |
K1.5_1 |
Теоретическая механика |
300₽ |
|
|
8378 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = 3∙cos(πt). у = 4∙sin(πt). найти траекторию точки, а также для заданного момента времени t1 =5/6 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 4.
| Номер варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| K1.2 |
3∙cos(πt) |
4∙sin(πt) |
5/6 |
|
Теоретическая механика |
K1.2_1 |
Теоретическая механика |
300₽ |
|
|
14584 |

ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.13 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.13 |
Теоретическая механика 2 |
300₽ |
|
|
12960 |
Стержень массой m1 и длиной l1 может свободно вращаться вокруг горизонтальной оси, проходящей через один из его концов. В покоящийся стержень попала пуля массой m2, летевшая горизонтально со скоростью v перпендикулярно оси вращения стержня, от которой точка попадания пули находилась на расстоянии l2. После удара пули, имеющего неупругий характер, стержень отклонился на угол α. Определить параметр, обозначенный в таблице данных для Вашего варианта знаком «?».
| Номер варианта |
m1, кг |
l1, м |
m2, кг |
l2, м |
v, м/с |
α, град |
| 9 |
12 |
1,8 |
? |
1,6 |
800 |
17,9 |
|
Теоретическая механика |
6-9 |
ЗабГУ. Физика. 2011 год |
250₽ |
|
|
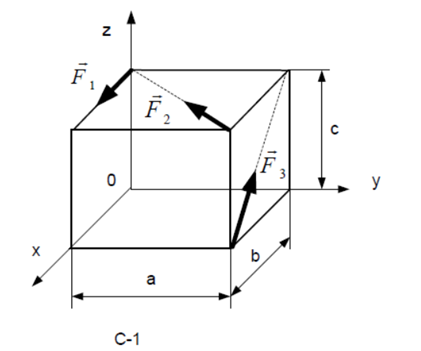
16914 |
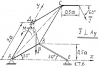
Для сил, изображённых на рисунке (рисунок С-1), определить:
• проекции на оси и моменты сил относительно заданных на рисунке координатных осей в аналитическом (буквенном) виде и в числовом
• главный вектор и главный момент системы сил
| № |
a, см |
b, см |
c, см |
F1, Н |
F2, Н |
F3, Н |
| 8 |
40 |
30 |
30 |
50 |
40 |
30 |
|
Теоретическая механика |
|
|
250₽ |
|
|
14914 |
Точка B движется в плоскости (x,y). Закон движения точки задан уравнениями: x = f1(t); y = f2(t), где x и y выражены в сантиметрах, t - в секундах.
Найти уравнение траектории точки; для момента времени t1 = 1 c определить скорость и ускорение точки. Зависимость x = f1(t) указана в табл. 2.1, а зависимость y = f2(t) дана в табл. 2.2. Номер варианта в табл.2.1 выбирается по предпоследней цифре шифра, а номер условия в табл. 2.2 - по последней.
| Вариант |
x = f1(t) |
y = f2(t) |
| К1-45 |
x = 4 + 2t |
y = 3t2-2 |
(х, у - в сантиметрах, t - в секундах).
|
Теоретическая механика |
К1-45 |
Методичка по термеху. Нижний Новгород. 2019 год |
200₽ |
|
|
15000 |
Точка B движется в плоскости (x,y). Закон движения точки задан уравнениями: x = f1(t); y = f2(t), где x и y выражены в сантиметрах, t - в секундах.
Найти уравнение траектории точки; для момента времени t1 = 1 c определить скорость и ускорение точки. Зависимость x = f1(t) указана в табл. 2.1, а зависимость y = f2(t) дана в табл. 2.2. Номер варианта в табл.2.1 выбирается по предпоследней цифре шифра, а номер условия в табл. 2.2 - по последней.
| Вариант |
x = f1(t) |
y = f2(t) |
| К1-85 |
x = 6t-3 |
y =3t2-2 |
(х, у - в сантиметрах, t - в секундах).
|
Теоретическая механика |
К1-85 |
Методичка по термеху. Нижний Новгород. 2019 год |
200₽ |
|
|
14840 |
Точка B движется в плоскости (x,y). Закон движения точки задан уравнениями: x = f1(t); y = f2(t), где x и y выражены в сантиметрах, t - в секундах.
Найти уравнение траектории точки; для момента времени t1 = 1 c определить скорость и ускорение точки. Зависимость x = f1(t) указана в табл. 2.1, а зависимость y = f2(t) дана в табл. 2.2. Номер варианта в табл.2.1 выбирается по предпоследней цифре шифра, а номер условия в табл. 2.2 - по последней.
| Вариант |
x = f1(t) |
y = f2(t) |
| К1-12 |
x = 3 - 2t |
y = 4 + 2t2 |
(х, у - в сантиметрах, t - в секундах).
|
Теоретическая механика |
К1-12 |
Методичка по термеху. Нижний Новгород. 2019 год |
200₽ |
|
|
14930 |
Точка B движется в плоскости (x,y). Закон движения точки задан уравнениями: x = f1(t); y = f2(t), где x и y выражены в сантиметрах, t - в секундах.
Найти уравнение траектории точки; для момента времени t1 = 1 c определить скорость и ускорение точки. Зависимость x = f1(t) указана в табл. 2.1, а зависимость y = f2(t) дана в табл. 2.2. Номер варианта в табл.2.1 выбирается по предпоследней цифре шифра, а номер условия в табл. 2.2 - по последней.
| Вариант |
x = f1(t) |
y = f2(t) |
| К1-53 |
x = 2t |
y = 2(t+1)2 |
(х, у - в сантиметрах, t - в секундах).
|
Теоретическая механика |
К1-53 |
Методичка по термеху. Нижний Новгород. 2019 год |
200₽ |
|
|
14856 |
Точка B движется в плоскости (x,y). Закон движения точки задан уравнениями: x = f1(t); y = f2(t), где x и y выражены в сантиметрах, t - в секундах.
Найти уравнение траектории точки; для момента времени t1 = 1 c определить скорость и ускорение точки. Зависимость x = f1(t) указана в табл. 2.1, а зависимость y = f2(t) дана в табл. 2.2. Номер варианта в табл.2.1 выбирается по предпоследней цифре шифра, а номер условия в табл. 2.2 - по последней.
| Вариант |
x = f1(t) |
y = f2(t) |
| К1-20 |
x = 3t |
y = 3t2 - 2 |
(х, у - в сантиметрах, t - в секундах).
|
Теоретическая механика |
К1-20 |
Методичка по термеху. Нижний Новгород. 2019 год |
200₽ |
|
|
14952 |
Точка B движется в плоскости (x,y). Закон движения точки задан уравнениями: x = f1(t); y = f2(t), где x и y выражены в сантиметрах, t - в секундах.
Найти уравнение траектории точки; для момента времени t1 = 1 c определить скорость и ускорение точки. Зависимость x = f1(t) указана в табл. 2.1, а зависимость y = f2(t) дана в табл. 2.2. Номер варианта в табл.2.1 выбирается по предпоследней цифре шифра, а номер условия в табл. 2.2 - по последней.
| Вариант |
x = f1(t) |
y = f2(t) |
| К1-61 |
x = 2t+2 |
y =(t+4)2 |
(х, у - в сантиметрах, t - в секундах).
|
Теоретическая механика |
К1-61 |
Методичка по термеху. Нижний Новгород. 2019 год |
200₽ |
|
|
18198 |
Точка движется в плоскости XOY. Закон движения точки задан уравнениями: x = f1(t); y = f2(t), где x и y выражены в сантиметрах, t в секундах.
Определить:
1. уравнение траектории точки,
2. определить скорость и ускорение точки для момента времени t = 2 c,
3. касательное и нормальное ускорение для момента времени t = 2 c,
4. построить траекторию и указать полученные векторы скорости и ускорения на чертеже
| Вариант |
x = f1(t) |
y = f2(t) |
| 3 |
x = 3 sin πt/2 |
y = 3 cos πt/2 |
|
Теоретическая механика |
|
|
200₽ |
|
|
14874 |
Точка B движется в плоскости (x,y). Закон движения точки задан уравнениями: x = f1(t); y = f2(t), где x и y выражены в сантиметрах, t - в секундах.
Найти уравнение траектории точки; для момента времени t1 = 1 c определить скорость и ускорение точки. Зависимость x = f1(t) указана в табл. 2.1, а зависимость y = f2(t) дана в табл. 2.2. Номер варианта в табл.2.1 выбирается по предпоследней цифре шифра, а номер условия в табл. 2.2 - по последней.
| Вариант |
x = f1(t) |
y = f2(t) |
| К1-29 |
x = 3t |
y = 4t3 |
(х, у - в сантиметрах, t - в секундах).
|
Теоретическая механика |
К1-29 |
Методичка по термеху. Нижний Новгород. 2019 год |
200₽ |
|