|
11216 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.9 |
4t2 + 3 |
2t |
1 |
|
Теоретическая механика |
K1.9 |
Теоретическая механика 2 |
300₽ |
|
|
11218 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.10 |
3sin(πt/2) |
4cos(πt/2) |
0,5 |
|
Теоретическая механика |
K1.10 |
Теоретическая механика 2 |
300₽ |
|
|
11220 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.11 |
3t |
5 - 3t2 |
2 |
|
Теоретическая механика |
K1.11 |
Теоретическая механика 2 |
300₽ |
|
|
11222 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.12 |
2sin(πt/6) - 4 |
3cos(πt/6) |
2 |
|
Теоретическая механика |
K1.12 |
Теоретическая механика 2 |
300₽ |
|
|
11224 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.13 |
4t2 + 1 |
4t |
1 |
|
Теоретическая механика |
K1.13 |
Теоретическая механика 2 |
300₽ |
|
|
11226 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.14 |
3cos(πt/6) |
2sin(πt/6) - 3 |
5 |
|
Теоретическая механика |
K1.14 |
Теоретическая механика 2 |
300₽ |
|
|
11228 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.15 |
6sin(2πt) |
4cos(2πt) |
2/3 |
|
Теоретическая механика |
K1.15 |
Теоретическая механика 2 |
300₽ |
|
|
11230 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.16 |
3t2 + 4t |
-2t |
1 |
|
Теоретическая механика |
K1.16 |
Теоретическая механика 2 |
300₽ |
|
|
11232 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.17 |
4cos(2πt) |
6sin(2πt) |
1/3 |
|
Теоретическая механика |
K1.17 |
Теоретическая механика 2 |
300₽ |
|
|
11234 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.18 |
5t - 6t2 |
2t |
1 |
|
Теоретическая механика |
K1.18 |
Теоретическая механика 2 |
300₽ |
|
|
11236 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
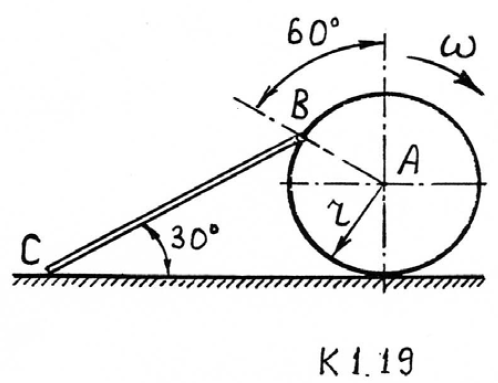
| К1.19 |
2sin(πt/6) - 3 |
3cos(πt/6) |
2 |
|
Теоретическая механика |
K1.19 |
Теоретическая механика 2 |
300₽ |
|
|
11238 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х=х(t), у=у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.20 |
4t - 5t2 |
2t |
2 |
|
Теоретическая механика |
K1.20 |
Теоретическая механика 2 |
300₽ |
|
|
11240 |
КИНЕМАТИКА ТОЧКИ
Точка М движется по окружности радиуса R согласно уравнению S = S(t). Определить и построить для момента времени t1 скорость, касательное, нормальное и полное ускорение этой точки. Исходные данные для расчета приведены в табл. 2.
| № варианта |
S = S(t), cм |
R, см |
Время t1, с |
| К2.1 |
8t2 |
4 |
2 |
|
Теоретическая механика |
K2.1 |
Теоретическая механика 2 |
300₽ |
|
|
11242 |
КИНЕМАТИКА ТОЧКИ
Точка М движется по окружности радиуса R согласно уравнению S = S(t). Определить и построить для момента времени t1 скорость, касательное, нормальное и полное ускорение этой точки. Исходные данные для расчета приведены в табл. 2.
| № варианта |
S = S(t), cм |
R, см |
Время t1, с |
| К2.2 |
5sin(πt/6) |
2,5 |
4 |
|
Теоретическая механика |
K2.2 |
Теоретическая механика 2 |
300₽ |
|
|
11244 |
КИНЕМАТИКА ТОЧКИ
Точка М движется по окружности радиуса R согласно уравнению S = S(t). Определить и построить для момента времени t1 скорость, касательное, нормальное и полное ускорение этой точки. Исходные данные для расчета приведены в табл. 2.
| № варианта |
S = S(t), cм |
R, см |
Время t1, с |
| К2.3 |
4t3 |
24 |
3 |
|
Теоретическая механика |
K2.3 |
Теоретическая механика 2 |
300₽ |
|
|
11248 |
КИНЕМАТИКА ТОЧКИ
Точка М движется по окружности радиуса R согласно уравнению S = S(t). Определить и построить для момента времени t1 скорость, касательное, нормальное и полное ускорение этой точки. Исходные данные для расчета приведены в табл. 2.
| № варианта |
S = S(t), cм |
R, см |
Время t1, с |
| К2.5 |
2t |
t2 - 3 |
2 |
|
Теоретическая механика |
K2.5 |
Теоретическая механика 2 |
300₽ |
|
|
11252 |
КИНЕМАТИКА ТОЧКИ
Точка М движется по окружности радиуса R согласно уравнению S = S(t). Определить и построить для момента времени t1 скорость, касательное, нормальное и полное ускорение этой точки. Исходные данные для расчета приведены в табл. 2.
| № варианта |
S = S(t), cм |
R, см |
Время t1, с |
| К2.7 |
2t |
4t - 6t2 |
1 |
|
Теоретическая механика |
K2.7 |
Теоретическая механика 2 |
300₽ |
|
|
11256 |
КИНЕМАТИКА ТОЧКИ
Точка М движется по окружности радиуса R согласно уравнению S = S(t). Определить и построить для момента времени t1 скорость, касательное, нормальное и полное ускорение этой точки. Исходные данные для расчета приведены в табл. 2.
| № варианта |
S = S(t), cм |
R, см |
Время t1, с |
| К2.9 |
4t2 + 3 |
2t |
1 |
|
Теоретическая механика |
K2.9 |
Теоретическая механика 2 |
300₽ |
|
|
11260 |
КИНЕМАТИКА ТОЧКИ
Точка М движется по окружности радиуса R согласно уравнению S = S(t). Определить и построить для момента времени t1 скорость, касательное, нормальное и полное ускорение этой точки. Исходные данные для расчета приведены в табл. 2.
| № варианта |
S = S(t), cм |
R, см |
Время t1, c |
| К2.11 |
3t |
5 - 3t2 |
2 |
|
Теоретическая механика |
K2.11 |
Теоретическая механика 2 |
300₽ |
|
|
11266 |
КИНЕМАТИКА ТОЧКИ
Точка М движется по окружности радиуса R согласно уравнению S = S(t). Определить и построить для момента времени t1 скорость, касательное, нормальное и полное ускорение этой точки. Исходные данные для расчета приведены в табл. 2.
| № варианта |
S = S(t), cм |
R, см |
Время t1, с |
| К2.13 |
4t2 + 1 |
4t |
1 |
|
Теоретическая механика |
K2.13 |
Теоретическая механика 2 |
300₽ |
|
|
11272 |
КИНЕМАТИКА ТОЧКИ
Точка М движется по окружности радиуса R согласно уравнению S = S(t). Определить и построить для момента времени t1 скорость, касательное, нормальное и полное ускорение этой точки. Исходные данные для расчета приведены в табл. 2.
| № варианта |
S = S(t), cм |
R, см |
Время t1, с |
| К2.16 |
3t2 + 4t |
-2t |
1 |
|
Теоретическая механика |
K2.16 |
Теоретическая механика 2 |
300₽ |
|
|
11276 |
КИНЕМАТИКА ТОЧКИ
Точка М движется по окружности радиуса R согласно уравнению S = S(t). Определить и построить для момента времени t1 скорость, касательное, нормальное и полное ускорение этой точки. Исходные данные для расчета приведены в табл. 2.
| № варианта |
S = S(t), cм |
R, см |
Время t1, с |
| К2.18 |
4t - 6t2 |
2t |
0,5 |
|
Теоретическая механика |
K2.18 |
Теоретическая механика 2 |
300₽ |
|
|
11280 |
КИНЕМАТИКА ТОЧКИ
Точка М движется по окружности радиуса R согласно уравнению S = S(t). Определить и построить для момента времени t1 скорость, касательное, нормальное и полное ускорение этой точки. Исходные данные для расчета приведены в табл. 2.
| № варианта |
S = S(t), cм |
R, см |
Время t1, с |
| К2.20 |
2t |
4t2 + 3 |
0,5 |
|
Теоретическая механика |
K2.20 |
Теоретическая механика 2 |
300₽ |
|
|
11584 |
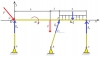
Сплошная конструкция расположена в вертикальной плоскости, шарнирно закреплена в точках A, B и C.
Определить реакции связей (стержни).
|
Теоретическая механика |
8 |
|
75₽ |
|
|
11586 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у=у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 4.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| 5 |
7t2 - 3 |
5t |
1/4 |
|
Теоретическая механика |
5 |
|
300₽ |
|
|
11622 |
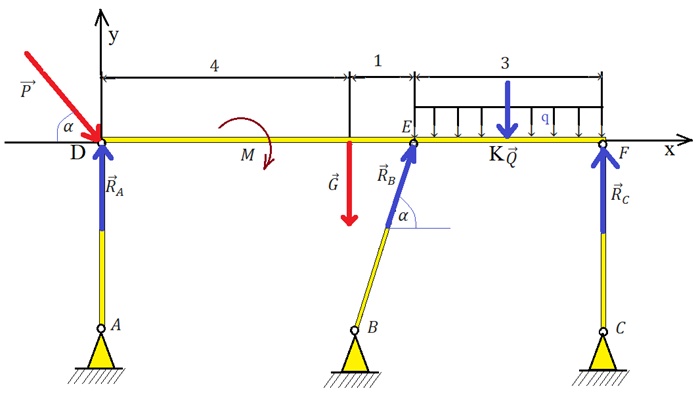
Гладкая сплошная ось колеса 3, расположена в вертикальной плоскости, шарнирно закреплена в точку A и неподвижно закреплена в точке C (рис 2.1). На ось действует активные силы: пара сил с моментом M = 25 Нм, в точке D на ось действует сосредоточенная сила R = 25 Н, на участке AC действует равномерно распределенная нагрузка интенсивности q = 18 Н/м. Определить реакции связи в точках A и C, вызываемые действующими нагрузками.
|
Теоретическая механика |
|
|
50₽ |
|
|
11632 |

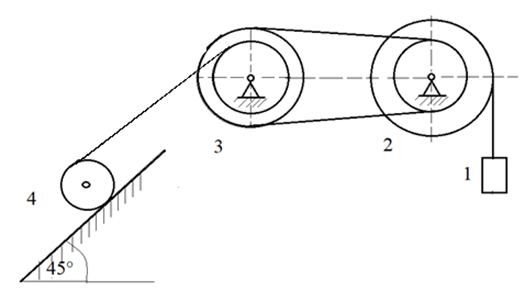
Механическая система, состоящая из четырех тел, приходит в движение под действием сил тяжести из состояния покоя. Начальное положение системы показано на рисунках 2.1-2.5. Учитывая трение качения тела 4 (вариант 19), пренебрегая другими силами сопротивления и массами нитей, предполагаемых нерастяжимыми, определить:
1. Скорость тела 1 в тот момент времени, когда пройденный им путь станет равным S1.
2. Ускорения тел, движущихся поступательно и ускорения центров масс тел, совершающих плоскопараллельное движение, угловое ускорение тел, совершающих вращательное и плоскопараллельное движения.
| Вариант № |
m1 |
m2 |
m3 |
m4 |
i2x |
i3x |
f |
δ, м |
| 19 |
6m |
3m |
2m |
m |
1,3r |
1,2r |
- |
0,001 |
|
Теоретическая механика |
|
|
400₽ |
|
|
11684 |
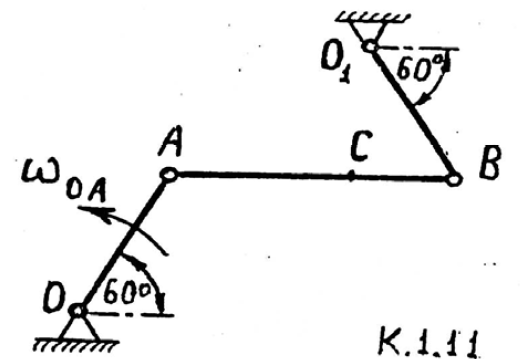
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.21 |
12∙cos((π∙t)/6) |
-4t |
2 |
|
Теоретическая механика |
K1.21 |
Теоретическая механика 2 |
300₽ |
|
|
11686 |

Механизм состоит из ступенчатых колёс 2-4, находящихся в зацеплении или связанных ременной передачей, рейки или груза, привязанного к концу нити, намотанной на одно из колёс.
В столбцах «Дано» таблицы 1.2 указан закон движения или закон изменения скорости одного из звеньев механизма ( s1(t) – закон движения рейки или груза в см, v1(t) – закон изменения скорости рейки или груза в см/с, φ(t) – закон вращения колеса в рад, ω(t) – закон изменения угловой скорости соответствующего колеса в 1/с) , заданы радиусы r2, r3, r4 в см. Положительное направление для φ и ω – против хода часовой стрелки, для s1 и v1 направление оси x показано на рисунках таблицы 1.1. В момент времени t = 2 с определить скорость и ускорение точки М, а также величины, указанные в столбце «Найти».
Дано: φ2 = 2t2 - 9, r2 = 4 см; r3 = 5 см; r4 = 8 см; t = 2 c. Найти v1, a1.
|
Теоретическая механика |
|
|
100₽ |
|
|
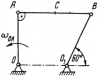
11820 |

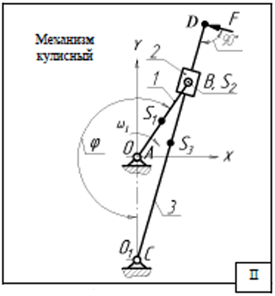
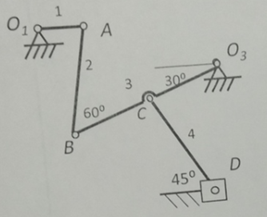
1. Структурный анализ механизма
1.1 Начертить схему механизма в масштабе k1 для заданного углом ψ мгновенного положения входного (ведущего) звена. Построение следует начинать с точки О, откладывая угол φ от оси ОХ или ОУ в сторону вращения ведущего звена механизма;
1.2 Определить количество звеньев и кинематических пар механизма, обозначить на схеме входное (ведущее) звено цифрой 1 и стойку (неподвижное звено) цифрой 0 (кинематические пары обозначают заглавными буквами);
1.3 Определить степень подвижности W механизма и выделить входящую в него структурную группу Ассура, указав класс, порядок и вид группы.
2. Кинематический анализ механизма в положении, заданном углом φ.
2.1. Построить планы скоростей для всех указанных на схеме механизма точек. При расчете принять ω1 = const.
2.2. Определить величины и направления угловых скоростей ωi звеньев (где i = 1, 2, 3, …− порядковый номер звена). Направления угловых скоростей указать на кинематической схеме механизма круговыми стрелками.
2.3 При определении скоростей и ускорений центров масс Si звеньев принять, что центр массы звена расположен на середине его длины. Центр массы ползуна принять совпадающим с центром шарнира.
Дано: ω1 = 40 рад/с, φ = 30 град, lAB = 0,12 м, lAC = 0,3 м, lCD = 0,45 м.
|
Теоретическая механика |
|
|
150₽ |
|
|
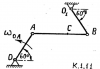
11822 |

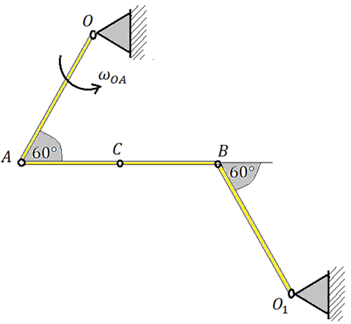
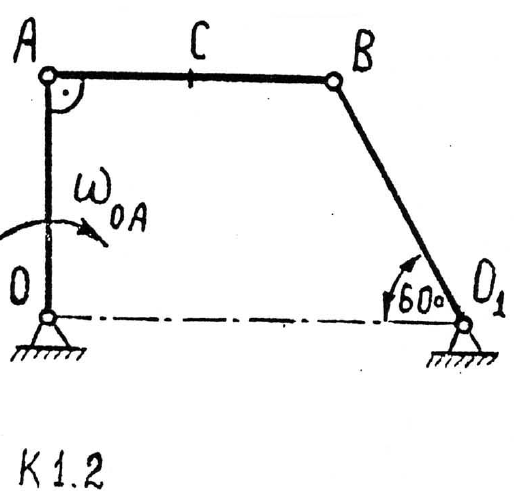
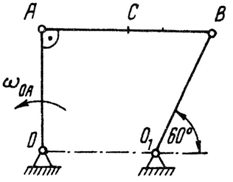
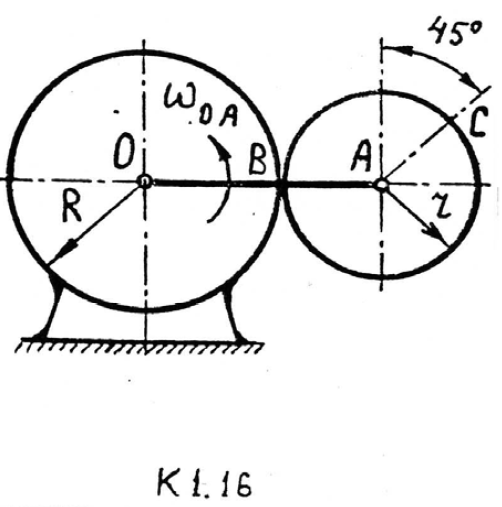
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Для заданного положения механизма найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки.
Дано: AO = 30 см, AB = 40 см, AC = 20 см, ωOA = 2 c-1, O1B = 30 см.
Найти: vA; vB; vC; ωAB = ?
|
Теоретическая механика |
|
|
300₽ |
|
|
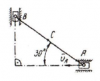
12272 |
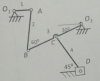
Стержень 1 вращается с постоянной угловой скоростью ω1 = 1 с-1. Длина стержней 1, 2, 3: l1 = 40 см; l2 = 40 см; l3 = 30 см; l4 = 20 см; Найдите скорости и ускорения узловых точек. Использовать теоремы о проекциях скоростей и МЦС. Найти угловые скорости и ускорения стержней.
|
Теоретическая механика |
|
|
200₽ |
|
|
12480 |
Для заданного механизма найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки.
OA = 30 см = 0,30 м; AB = 40 см = 0,40 м; AC = 20 см = 0,20 м; ωOA = 2 c-1.
|
Теоретическая механика |
K1.2 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
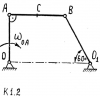
12482 |
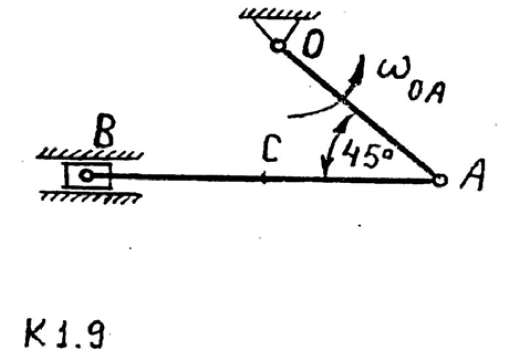
Для заданного механизма найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки.
OA = 30 см = 0,30 м; AB = 50 см = 0,50 м; AC = 25 см = 0,25 м; ωOA = 3 c-1.
|
Теоретическая механика |
K1.9 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
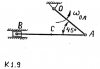
12484 |
Для заданного механизма найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки.
OA = 25 см = 0,25 м; AB = 40 см = 0,40 м; AC = 25 см = 0,25 м; ωOA = 3 c-1.
|
Теоретическая механика |
K6.6 |
Теоретическая механика 2 |
300₽ |
|
|
12486 |
Для заданного механизма найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки.
AB = 15 см; r = 15 см ; ωOA = 4 c-1; ω1 = 3 c-1.
|
Теоретическая механика |
K1.19 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
12588 |
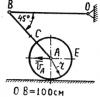
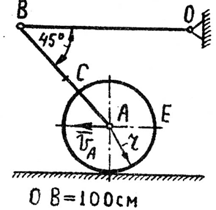
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Для заданного положения механизма найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис. К6.13.
AB = 0,8 м; AC = 0,4 м; OB = 1 м; r = 0,25 м; vA =1 м/с.
|
Теоретическая механика |
K6.13 |
Теоретическая механика 2 |
300₽ |
|
|
12590 |
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис. K6.1-K6.20
OA = 30 см = 0,30 м; AB = 50 см = 0,50 м; AC = 25 см = 0,25 м; ωOA = 3 c-1.
|
Теоретическая механика |
K6.15 |
Теоретическая механика 2 |
300₽ |
|
|
12620 |
ПЛОСКО-ПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Для заданного положения механизма найти скорости точек В и С, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис. К6. I9.
|
Теоретическая механика |
K6.19 |
Теоретическая механика 2 |
300₽ |
|
|
12740 |
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис. K6.5.
OA = 0,35 м;AB = 0,15 м; AC = 0,15 м; ωOA = 2 c-1.
|
Теоретическая механика |
K1.16 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
12960 |
Стержень массой m1 и длиной l1 может свободно вращаться вокруг горизонтальной оси, проходящей через один из его концов. В покоящийся стержень попала пуля массой m2, летевшая горизонтально со скоростью v перпендикулярно оси вращения стержня, от которой точка попадания пули находилась на расстоянии l2. После удара пули, имеющего неупругий характер, стержень отклонился на угол α. Определить параметр, обозначенный в таблице данных для Вашего варианта знаком «?».
| Номер варианта |
m1, кг |
l1, м |
m2, кг |
l2, м |
v, м/с |
α, град |
| 9 |
12 |
1,8 |
? |
1,6 |
800 |
17,9 |
|
Теоретическая механика |
6-9 |
ЗабГУ. Физика. 2011 год |
250₽ |
|
|
13812 |

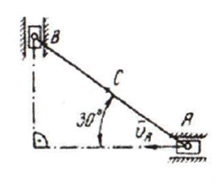
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис.
OA = 40 см = 0,40 м; AB = 30 см = 0,30 м; AC = 15 см = 0,15 м; ωOA = 2 c-1.
|
Теоретическая механика |
K 6-1 |
Теоретическая механика |
300₽ |
|
|
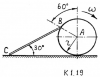
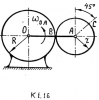
13814 |
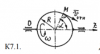
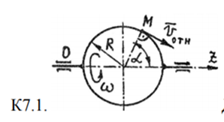
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
Диск радиуса R = 0,3 м вращается вокруг оси 0Z с угловой скоростью ω = 2 с-1. По его ободу движется точка с постоянной скоростью Vотн = 0,3 м/с. Определить абсолютную скорость точки в указанном положении, если угол α = 60°.
|
Теоретическая механика |
K7.1 |
Теоретическая механика 2 |
300₽ |
|
|
13816 |
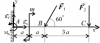
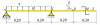
Определить величины реакций в заделке одноопорной балки по варианту. Проверить правильность решения.
| Параметр |
Вариант |
| 1 |
| F1, кН |
10 |
| F2, кН |
4,4 |
| m, кН∙м |
14 |
| a, м |
0,2 |
|
Теоретическая механика |
6-20 |
Теоретическая механика |
100₽ |
|
|
13818 |

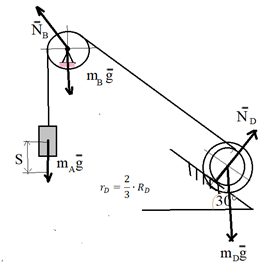
Механическая система, состоящая из нескольких тел, под действием сил тяжести приходит в движение из состояния покоя. Учитывая трение скольжения тела А, пренебрегая другими силами сопротивления и массами нитей, предполагаемых нерастяжимыми, определить скорость тела А в тот момент, когда пройденный им путь станет равным S
Вариант 22.
Дано: MA =1 кг; MB = 2 кг; MD = 5 кг; RB = 0,30 м; RD = 0,15 м; ρDx = 0,12 м; α = 30°; S = 1,5 м;
Найти: vA = ?
|
Теоретическая механика |
K6-18 |
Теоретическая механика |
450₽ |
|
|
13844 |
Телу, находящемуся на наклонной плоскости с углом α, сообщили начальную скорость v0, направленную вверх вдоль линии наибольшего ската. Коэффициент трения тела о плоскость равен f. Найти путь, пройденный телом до остановки.
|
Теоретическая механика |
Д2.4 |
Теоретическая механика 2 |
150₽ |
|
|
13846 |

Доска ОА массой m длиной l может вращаться без трения вокруг горизонтальной оси О. В нижний конец A неподвижно висящей доски, попадает пуля массой m1, летящая горизонтально со скоростью v и застревает в ней. Определить угловую скорость доски после попадания пули. При вычислении момента инерции доски считать ее однородным стержнем
|
Теоретическая механика |
Д5.4 |
Теоретическая механика 2 |
300₽ |
|
|
13848 |
Лодка массой m плавает в стоячей воде. На задней скамейке лодки, находившейся в покое, сидят два человека. Один из них массой m1, переходит на нос лодки, проходя по ней расстояние l1, Другой человек массой т2, перемещается на среднюю скамейку на расстояние l2 = 0,25l1. На какое расстояние перемещается при этом лодка?
|
Теоретическая механика |
Д4.4 |
Теоретическая механика 2 |
150₽ |
|
|
13850 |

К нижнему шкиву С подъемника приложен вращающий момент М. Определить ускорение груза А массой m1 поднимаемого вверх, если масса противовеса В равна m2 а шкивы C и D радиусами r и массой m каждый представляют собой однородные круглые цилиндры. Массой ремня пренебречь.
|
Теоретическая механика |
Д7.4 |
Теоретическая механика 2 |
300₽ |
|
|
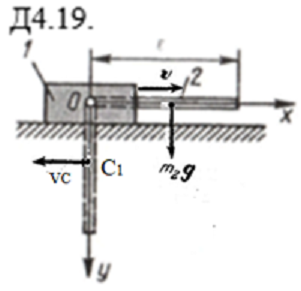
13894 |
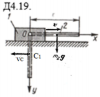
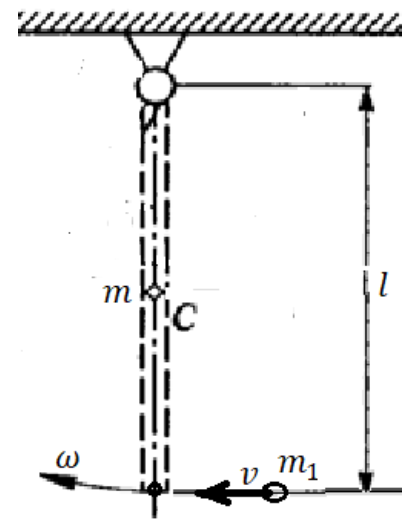
Тело 1 массой 6 кг может двигаться по горизонтальной направляющей. Тело 1 и однородный стержень 2 массой 3 кг и длиной l = 0,8 м опустился под действием силы тяжести и занимает вертикальное положение. В начальный момент система находилась в покое. Пренебрегая трением в оси А, найти скорость v бруска в тот момент, когда стержень проходит через вертикаль.
|
Теоретическая механика |
Д4.19 |
Теоретическая механика 2 |
300₽ |
|