|
14494 |

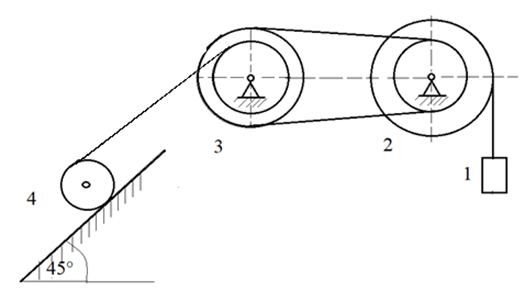
Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
27 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14420 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
8 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14454 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
14 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14478 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
21 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14252 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры — в см.
|
Теоретическая механика |
3 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14414 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
7 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14508 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н ). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
30 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14448 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
13 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14468 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
18 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
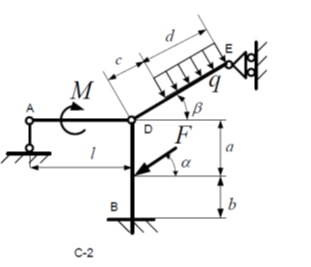
16913 |
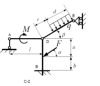
Для указанной на рисунке (С-2) конструкции найти значения неизвестных реакций внешних и внутренних связей.
| № |
a, см |
b, см |
c, см |
d, см |
l, см |
α, ° |
β, ° |
q, Н/м |
F, Н |
M, Н∙м |
| 8 |
40 |
30 |
30 |
50 |
80 |
45 |
30 |
6 |
3 |
5 |
|
Теоретическая механика |
|
|
400₽ |
|
|
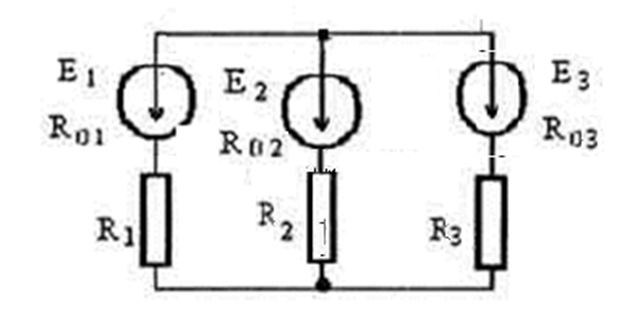
15868 |
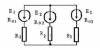
Дана сложная электрическая цепь. Определить токи в данной цепи методом наложений.
| E1, В |
E2, В |
E3, В |
R01, Ом |
R02, Ом |
R03, Ом |
R1, Ом |
R2, Ом |
R3, Ом |
| 105 |
25 |
90 |
1 |
2 |
1,5 |
35 |
10 |
25 |
|
Электротехника |
|
|
400₽ |
|
|
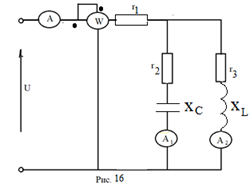
16726 |
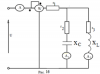
В сеть переменного тока напряжением U включена цепь, состоящая из двух параллельных ветвей с сопротивлением r1, r2 и r3, индуктивным сопротивлением xL и ёмкостным сопротивлением xC (рис. 16, табл. 21). Определить показания измерительных приборов, включенных в сеть, полную и реактивную мощность цепи, построить векторную диаграмму и треугольник мощностей.
Таблица 21
| Номер варианта |
U, В |
r1, Ом |
r2, Ом |
r3, Ом |
xL, Ом |
xC, Ом |
| 3 |
200 |
3,5 |
15 |
6,6 |
9,6 |
6 |
|
Электротехника |
|
|
400₽ |
|
|
8618 |
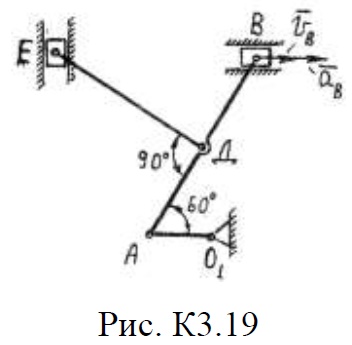
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
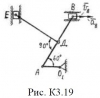
На рис. К3.19 показана схема механизма, причем
О1А = L1 = 0,4 м;
АВ = L1 = 1,4 м;
ДE = L3 = 1,2 м;
O2В = L4 = 0,6 м;
АД = ДВ.
Ползун в данном положении механизма имеет скорость VB = 4 м/с и ускорение aB = 6 м/с2. Для заданного положения механизма построить мгновенные центры скоростей шатунов АВ и ДЕ, найти скорости точек А, Д, Е, угловые скорости указанных шатунов и кривошипа О1А, а также ускорение точки А.
|
Теоретическая механика |
K1.19 |
Теоретическая механика 2 |
400₽ |
|
|
11632 |

Механическая система, состоящая из четырех тел, приходит в движение под действием сил тяжести из состояния покоя. Начальное положение системы показано на рисунках 2.1-2.5. Учитывая трение качения тела 4 (вариант 19), пренебрегая другими силами сопротивления и массами нитей, предполагаемых нерастяжимыми, определить:
1. Скорость тела 1 в тот момент времени, когда пройденный им путь станет равным S1.
2. Ускорения тел, движущихся поступательно и ускорения центров масс тел, совершающих плоскопараллельное движение, угловое ускорение тел, совершающих вращательное и плоскопараллельное движения.
| Вариант № |
m1 |
m2 |
m3 |
m4 |
i2x |
i3x |
f |
δ, м |
| 19 |
6m |
3m |
2m |
m |
1,3r |
1,2r |
- |
0,001 |
|
Теоретическая механика |
|
|
400₽ |
|
|
11006 |

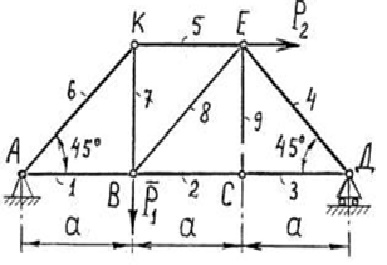
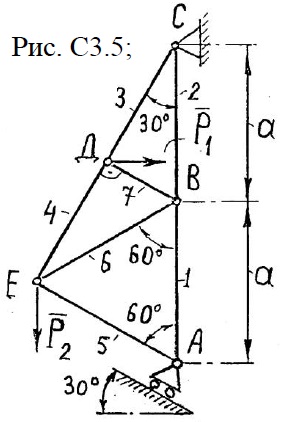
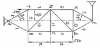
ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. C5.4 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| C5.41 |
2, 8, 5 |
3, 4 |
70 |
90 |
|
Теоретическая механика |
C5.4 |
Теоретическая механика 2 |
400₽ |
|
|
8398 |
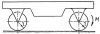
Тележка начинает движение из состояния покоя под действием момента М, приложенного к передним колёсам. Масса тележки без колёс равна m1, масса каждого из четырёх колёс радиусом r равна m2, коэффициент трения качения fδ. Определить ускорение тележки, считая колёса однородными дисками.
|
Теоретическая механика |
Д7.18 |
Теоретическая механика 2 |
400₽ |
|
|
14882 |
Точечный монохроматический источник света (длина волны 638 нм) расположен на расстоянии 50 см от ширмы с круглым отверстием 0,3 мм. Найдите положение наиболее удаленного от ширмы максимума освещенности. Построить график распределения интенсивности вдоль оси отверстия.
|
Оптика |
|
|
400₽ |
|
|
11038 |
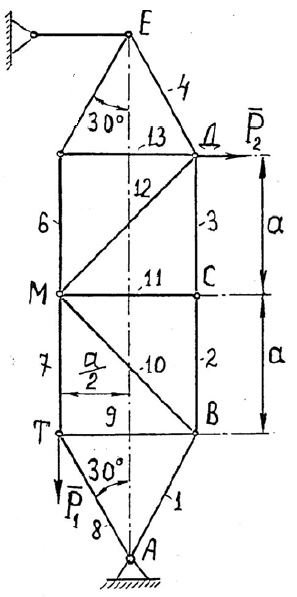
ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. C5.19 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| C5.19 |
7, 10, 2 |
5, 4 |
170 |
200 |
|
Теоретическая механика |
C5.19 |
Теоретическая механика 2 |
400₽ |
|
|
12266 |
Геометрическая фигура вращается вокруг оси, лежащей в ее плоскости. По каналу, расположенном на фигуре, движется точка M по известному закону AM(t) = φ(t) = AM = 3∙π/4(t2 + 4t) (в см). Найти абсолютную скорость и абсолютное ускорение точки при t = 2 c. Даны закон вращения фигуры φ(t) постоянная угловая скорость ω(0), время t и размеры фигуры. Углы даны в рад, размеры - в см. Длина AM - длина дуги окружности.
ω = 0,46 рад/с, R = 12 см, t = 2 с.
|
Механика |
|
|
400₽ |
|
|
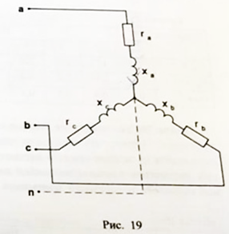
16729 |

В трехфазную четырехпроводную цепь с симметричным линейным напряжением UЛ, включены звездой сопротивления ra, rb, rc и xa, хb, xc. Определить фазные и линейные токи, ток в нейтральном проводе, активную мощность всей цепи и каждой фазы в отдельности. Построить векторную диаграмму токов и напряжений.
| Номер варианта |
UЛ, В |
ra, Ом |
rb, Ом |
rc, Ом |
xa, Ом |
xb, Ом |
xc, Ом |
| 7 |
380 |
7 |
8 |
1 |
8 |
7 |
12 |
|
Электротехника |
|
|
400₽ |
|
|
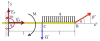
18278 |

Шарик массы m движется из положения A внутри изогнутой трубки, расположенной в вертикальной плоскости. Шарик, пройдя путь l0, отделяется oт пружины. В точке B шарик, не меняя значения своей скорости, переходит на участок BC, где на него дополнительно действует переменная сила F, направление которой указано на рисунке. Пользуясь общими теоремами динамики точки, определить скорость шарика в положениях B и C. В задании принята следующие обозначения: vA - начальная скорость шарика, AB - длина участка, τ - время движения на участке BC, f - коэффициент трения скольжения шарика по стенке трубки, c - коэффициент жесткости пружины.
| № |
Рис. |
m |
vA |
f |
AB |
l0 |
c |
α |
β |
τ |
F(t) |
| 16 |
|
кг |
м/с |
|
м |
см |
Н/см |
град |
с |
Н |
| 6.8 |
0,4 |
4 |
0,04 |
0,5 |
15 |
1,9 |
- |
45 |
1 |
3 cos 1,5t |
4
|
Механика |
|
|
300₽ |
|
|
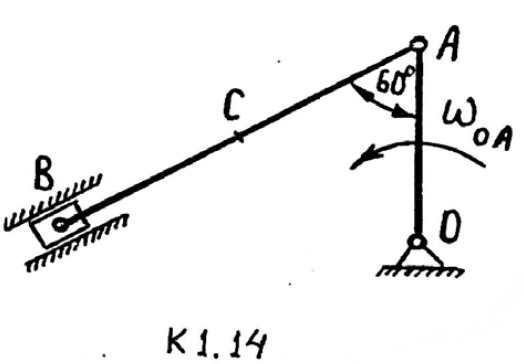
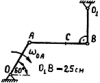
14110 |
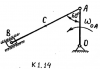
Для заданного механизма найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки.
OA = 30 см; AB = 60 см; AC = 30 см; ωOA = 3 c-1.
|
Теоретическая механика |
K1.14 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
13354 |
Шар массой m1, летящий со скоростью v1, сталкивается с неподвижным шаром массой m2. После удара шары разлетаются под углом α друг к другу. Удар абсолютно упругий, столкновение происходит в горизонтальной плоскости. Найти скорости шаров u1 и u2 после удара.
| № варианта |
m1, v1, m2, α |
| 17 |
m1 = 350 г, v1 = 20 м/с, m2 = 200 г, α = 60° |
|
ФИЗИКА |
3-3-17 |
ТГУ. Практические занятия по физике. 2019 год |
300₽ |
|
|
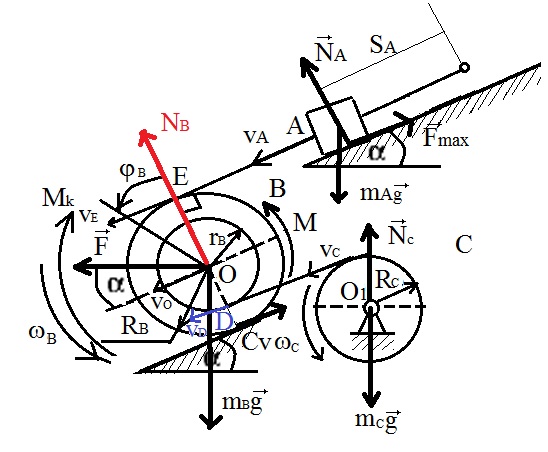
6361 |
ПРИМЕНЕНИЕ ТЕОРЕМЫ ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ К ИЗУЧЕНИЮ ДВИЖЕНИЯ МЕХАНИЧЕСКОЙ СИСТЕМЫ. Механическая система, изображенная на рисунке, приводится в движение из состояния покоя. При этом колесо B катится без скольжения по плоскости. Массы тел A, B и C) (mA, mB, mC), заданная нагрузка (F и M) и радиус инерции ρB колеса B приведены в таблице. Радиусы колеса B и шкива C соответственно равны RB = 0,8 м, rB = 0,5 м, Rc = 0,2 м. Углы α и β имеют значения: α = 30°, β = 60°. Коэффициент трения качения колеса B равен k = 0,05∙RB; коэффициент трения скольжения тела A равен f = 0,1.
Используя теорему об изменении кинетической энергии системы, определить скорость и ускорение тела A после того, как оно переместится на расстояние SA = 2 м. Шкив C считать однородным сплошным диском; силами сопротивления в подшипниках, массой троса, его растяжением и проскальзыванием по ободу шкива пренебречь.
Числовые значения параметров контрольной работы Д4 вариант №29 (1)
| Номер варианта |
№ Дано |
mA, кг |
mB, кг |
mC, кг |
M, Н∙м |
F, Н |
ρB, см |
| 29 |
1 |
30 |
120 |
80 |
200 |
40 |
0,7 |
|
Теоретическая механика |
D3.29 |
Теоретическая механика |
300₽ |
|
|
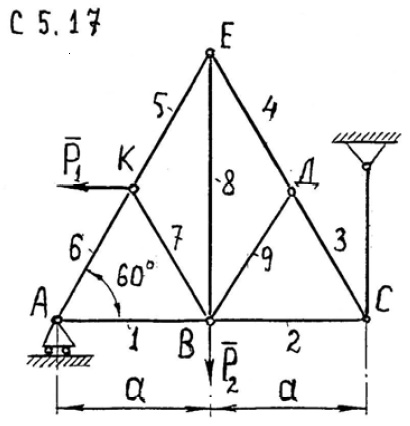
11032 |
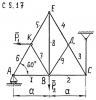
ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. C5.17 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| C5.17 |
1, 7, 5 |
2, 3 |
130 |
150 |
|
Теоретическая механика |
C5.17 |
Теоретическая механика 2 |
300₽ |
|
|
14302 |

Для заданного механизма дано ОА = 0,5 м, ω = 2 - t рад/с. Для момента времени t = 1 с, полагая, что в этот момент времени механизм занимает положение, указанное на рисунке, определить:
1) Скорость звена 1;
2) Ускорение звена 1;
3) Относительную скорость точки A;
4) Ускорение Кориолиса.
|
Теоретическая механика |
Д7.22 |
Теоретическая механика 2 |
300₽ |
|
|
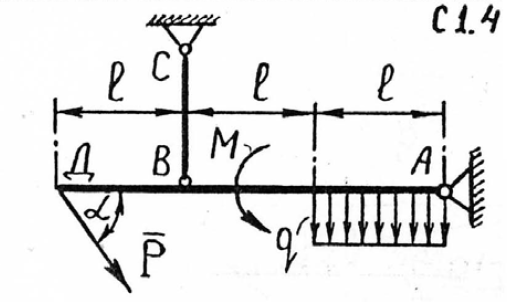
8478 |
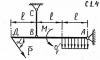
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. С1.14, исходные данные приведены в табл. 1.
| Номер варианта |
P, кН |
G, кН |
M, кНм |
q, кН/м |
l, м |
α, град |
| С1.4 |
10 |
- |
4 |
2 |
1 |
45° |
|
Теоретическая механика |
C1.4 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
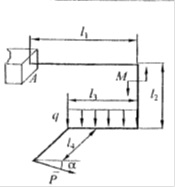
6493 |
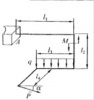
ПРОСТРАНСТВЕННАЯ СИСТЕМА СИЛ
Изогнутая под прямыми углами пространственная рама концом А заделана в неподвижную опору и нагружена равномерно распределенной нагрузкой интенсивностью q или линейное I распределенной нагрузкой с максимальной интенсивностью qmax, парой сил с моментом M и силой P, расположенной в плоскости перпендикулярной участку рамы длиной l4 и образующей угол α с прямой изображенной на рисунке. Определить опорные реакции рамы.
| Номер варианта |
Дано: |
P, Н |
M, Н∙м |
q, Н/м |
l1, м |
l2, м |
l3, м |
l4, м |
α, ° |
| 20 |
5 |
200 |
500 |
300 |
1,8 |
1,2 |
1,4 |
1 |
150 |
|
Теоретическая механика |
|
|
300₽ |
|
|
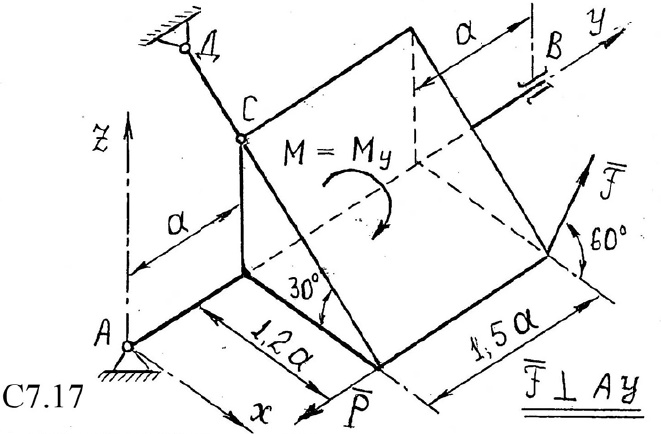
11112 |

ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунке.
|
Теоретическая механика |
C7.17 |
Теоретическая механика 2 |
300₽ |
|
|
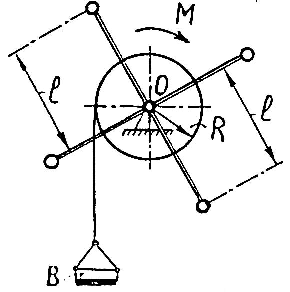
14730 |
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА.
Груз B массой m1 прикреплен к тросу, намотанному на барабан радиусом R, массой m2. Барабан начинает вращаться вместе с невесомой крестовиной, на концах которой прикреплены четыре груза массой m3 каждый, под действием вращающего момента M. Все стержни крестовины имеют одинаковую длину 2l. Определить закон изменения скорости груза. Барабан считать сплошным цилиндром.
|
Теоретическая механика |
Д5.16 |
Теоретическая механика 2 |
300₽ |
|
|
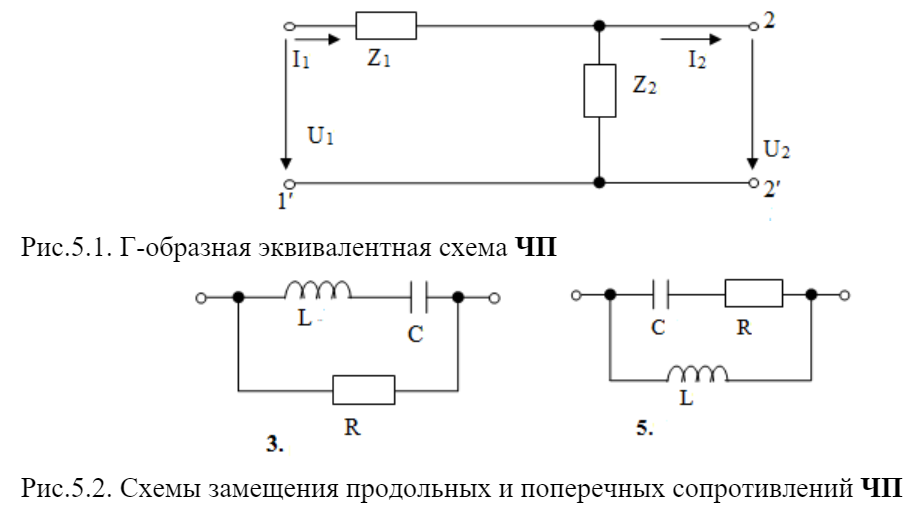
9754 |

ЗАДАНИЕ № 3 «РАСЧЕТ ЧЕТЫРЁХПОЛЮСНИКА»
На рис. 5.1 представлена Г-образная эквивалентная схема четырёхполюсника (ЧП), где Z1 – продольное сопротивление, Z2 – поперечное сопротивление.
Выполнить следующее:
1) начертить исходную схему ЧП;
2) свести полученную схему ЧП к Г-образной эквивалентной схеме ЧП, заменив трёхэлементные схемы замещения продольного и поперечного сопротивлений двухэлементными схемами: Z1 = R1 + jX1, Z2 = R2 + jX2. Дальнейший расчёт вести для эквивалентной схемы;
3) определить коэффициенты A – формы записи уравнений ЧП;
4) определить сопротивления холостого хода и короткого замыкания со стороны первичных (11’) и вторичных выводов (22’):
а) через A – параметры;
б) непосредственно через продольное и поперечное сопротивления для режимов холостого хода и короткого замыкания на соответствующих выводах;
5) определить характеристические сопротивления для выводов 11’ и 22’ и постоянную передачи ЧП;
6) определить комплексный коэффициент передачи по напряжению и передаточную функцию ЧП;
Таблица 5.1. Параметры элементов продольного и поперечного сопротивлений ЧП
| Номер строки |
R, Ом |
L, мГ |
C, мкФ |
f0, кГц |
| 2 |
30 |
5 |
5 |
30 |
|
Электротехника |
235.3 |
|
300₽ |
|
|
8562 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = x(t), у = y(t). найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 4.
| Номер варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| K1.11 |
3t |
5 - 3t2 |
2 |
|
Теоретическая механика |
K1.11_1 |
Теоретическая механика |
300₽ |
|
|
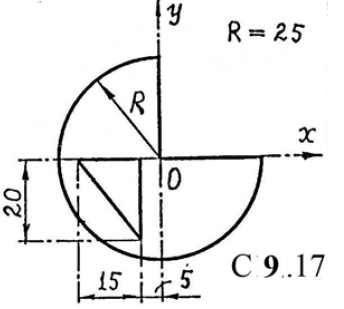
11192 |
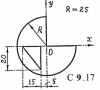
ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ОДНОРОДНОГО ТЕЛА
Найти положение центра тяжести плоской фермы, пластинки и объемного тела. Ферма состоит из однородных стержней; пластинка имеет малую постоянную толщину. Схемы тел показаны на рис. C9.17. Размеры ферм даны в метрах, остальных тел - в сантиметрах.
|
Теоретическая механика |
C9.17 |
Теоретическая механика 2 |
300₽ |
|
|
14812 |
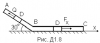
Груз D массой m, получив в точке A начальную скорость v0, движется в изогнутой трубе АВС, расположенной в вертикальной плоскости; участки трубы или оба наклонные, или один горизонтальный, а другой наклонный (рис.3.1, табл. 3.2).
На участке АВ на груз кроме силы тяжести действуют постоянная сила Q (ее направление показано на рисунках).
В точке B груз, не изменяя своей скорости, переходит на участок BC трубы, где на него кроме силы тяжести действует переменная сила F, проекция которой Fx на ось х задана в таблице.
Считая груз материальной точкой и зная время t1 движения груза от точки A до точки B, найти скорость груза на участке BC через t2 = 2 сек. после выхода из точки B. Трением груза о трубу пренебречь.
| Вариант |
m, кг |
v0, м/c |
Q, Н |
t1, с |
Fx, Н |
| 8 |
4,8 |
10 |
10 |
1 |
3t2 |
|
Теоретическая механика |
Д1-8 |
Методичка по термеху. Нижний Новгород. 2019 год |
300₽ |
|
|
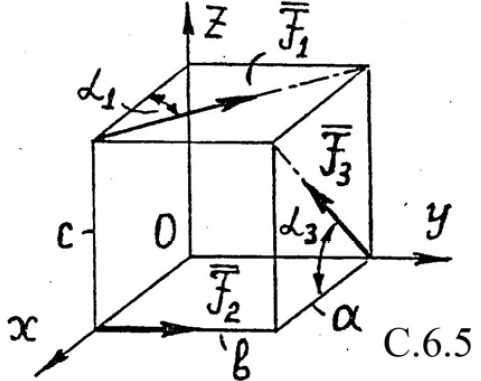
11048 |
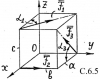
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C6.5 |
Теоретическая механика 2 |
300₽ |
|
|
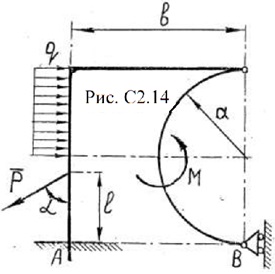
8496 |
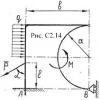
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. С2.14, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С2.14 |
4 |
5.2 |
3 |
2.5 |
3.2 |
1.0 |
30° |
|
Теоретическая механика |
C2.14_1 |
Теоретическая механика |
300₽ |
|
|
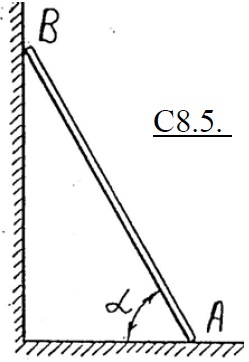
11128 |

ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
Расчетные схемы даны на рис. С8.5. Однородный брус AB опирается в точке A на негладкий пол, а в точке B - на гладкую стену. Определить наименьший коэффициент трения между брусом и полом, при котором брус останется в равновесии. Угол наклона бруса к горизонтали равен α.
|
Теоретическая механика |
C8.5 |
Теоретическая механика 2 |
300₽ |
|
|
8582 |
ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Винт совершившего посадку самолета с момента выключения мотора совершил до остановки 100 оборотов. Начальная скорость винта соответствовала 1200 об/мин. Сколько времени прошло с момента выключения мотора до остановки винта, если считать его вращение равно замедленным?
|
Фотоэффект |
K4.3 |
Теоретическая механика 2 |
300₽ |
|
|
12740 |
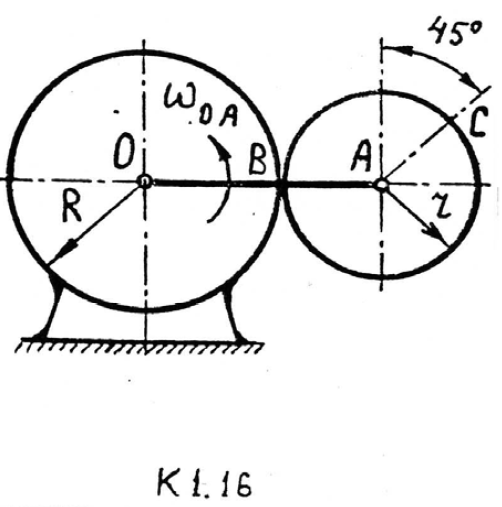
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис. K6.5.
OA = 0,35 м;AB = 0,15 м; AC = 0,15 м; ωOA = 2 c-1.
|
Теоретическая механика |
K1.16 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
11208 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.5 |
2t |
t2 - 3 |
2 |
|
Теоретическая механика |
K1.5 |
Теоретическая механика 2 |
300₽ |
|
|
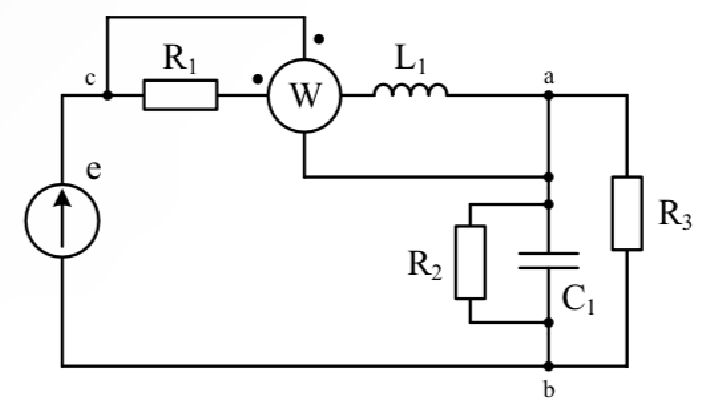
18149 |
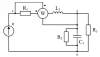
Пример расчёта электрической цепи синусоидального тока комплексным методом
Для электрической цепей синусоидального однофазного тока, представленной на рисунке, необходимо выполнить следующее:
1. Определить токи в ветвях заданной электрической цепи, используя комплексный метод расчета.
2. Составить баланс мощностей в комплексном виде.
3. Записать мгновенное значение тока в неразветвлённой части цепи.
4. Определить показание ваттметра.
5. Для любого замкнутого контура, содержащего источник ЭДС, построить векторную диаграмму напряжений, совмещённую с векторной диаграммой токов.
Исходные данные:
| Em, B |
φe, град |
r1, Ом |
r2, Ом |
r3, Ом |
L1, мГн |
C1, мкФ |
f, Гц |
| 220 |
60 |
20 |
32 |
40 |
63,7 |
132,7 |
50 |
|
Электротехника |
|
|
300₽ |
|
|
14042 |

Для определения момента трения в цапфах на вал насажен маховик массой М, радиус инерции маховика равен р. Маховику сообщена начальная угловая скорость ω0; предоставленный самому себе, он остановился через Т[с] . Определить момент трения, считая его постоянным
|
Теоретическая механика |
Д5.14 |
Теоретическая механика 2 |
300₽ |
|
|
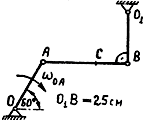
8792 |
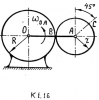
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис.
OA = 25 см = 0,25 м; AB = 40 см = 0,40 м; AC = 25 см = 0,25 м; ωOA = 5 c-1; OB1 = 25 см.
|
Теоретическая механика |
K6.9 |
Теоретическая механика 2 |
300₽ |
|
|
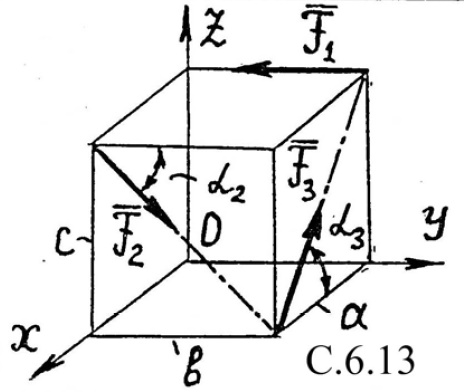
11064 |
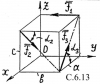
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллелепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C6.13 |
Теоретическая механика 2 |
300₽ |
|
|
8512 |

ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. С3.5 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| С3.5 |
1, 6, 4 |
2, 3 |
120 |
80 |
|
Теоретическая механика |
C3.5_1 |
Теоретическая механика |
300₽ |
|
|
16844 |
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 1.1 -С 1.20, исходные данные приведены в табл. 1.
| Номер варианта |
Р, кН |
G, кН |
M, кН∙м |
q, кН∙м |
l, м |
α, град |
| C1.1 |
10 |
15 |
20 |
1 |
2 |
30° |
|
Теоретическая механика |
C1.1 |
Теоретическая механика 2 |
300₽ |
|
|
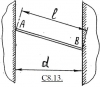
11144 |
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
Расчетные схемы даны на рис. С8.13. Однородный стержень AB длиной l опирается концом A на гладкую стену, а другим B - на шероховатую стену. Расстояние между стенами равно d, причем d < l. Определить коэффициент трения f между стеной и стержнем, при котором возможно равновесие стержня.
|
Теоретическая механика |
C8.13 |
Теоретическая механика 2 |
300₽ |
|
|
8598 |
ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Тело начинает вращаться равноускоренно из состояния покоя. В тот момент, когда его угловая скорость численно равна углу поворота, оно делает 120 об/мин. Чему равно угловое ускорение тела и сколько оборотов оно сделало за первые 15 с? Найти линейную скорость точки тела, а также ее нормальное, касательное и полное ускорения в указанный момент времени при условии, что точка находится от оси вращения на расстоянии 0.4 м.
|
Теоретическая механика |
K4.20 |
Теоретическая механика 2 |
300₽ |
|
|
11224 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.13 |
4t2 + 1 |
4t |
1 |
|
Теоретическая механика |
K1.13 |
Теоретическая механика 2 |
300₽ |
|
|
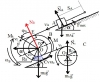
8688 |

ПРИНЦИП ДАЛАМБЕРА
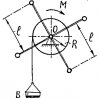
Однородная проволочная полуокружность массой m радиусом R вращается с постоянной угловой скоростью ω вокруг оси ОА (оси Оу). Определить реакции в точках крепления В и D кольца к стержню OA. Расстояние от центра тяжести полукольца до оси ОA: $$x_C=\frac{2R}{3\pi}$$.
|
Теоретическая механика |
Д6.3 |
Теоретическая механика 2 |
300₽ |
|