|
5091 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 4.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.9 |
4t2+3 |
3∙t |
1 |
|
Теоретическая механика |
K1.9_1 |
Теоретическая механика |
300₽ |
|
|
8630 |
Точка М движется по ободу диска радиуса R = 0,2 м согласно уравнению ОМ = 3t2 + 2t м. Определить абсолютную скорость точки М в указанном положении, если закон вращения диска φ = 2t рад.
|
Теоретическая механика |
K7.12 |
Теоретическая механика 2 |
300₽ |
|
|
18259 |

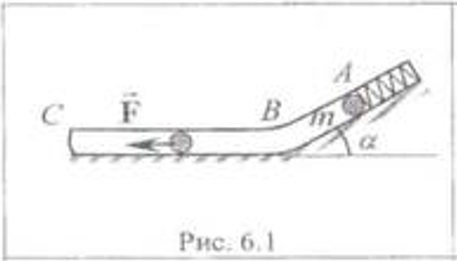
Шарик массы m движется из положения A внутри изогнутой трубки, расположенной в вертикальной плоскости. Шарик, пройдя путь l0, отделяется oт пружины. В точке B шарик, не меняя значения своей скорости, переходит на участок BC, где на него дополнительно действует переменная сила F, направление которой указано на рисунке. Пользуясь общими теоремами динамики точки, определить скорость шарика в положениях B и C. В задании принята следующие обозначения: vA - начальная скорость шарика, AB - длина участка, τ - время движения на участке BC, f - коэффициент трения скольжения шарика по стенке трубки, c - коэффициент жесткости пружины.
| № |
Рис. |
m |
vA |
f |
AB |
l0 |
c |
α |
β |
τ |
F(t) |
| 9 |
|
кг |
м/с |
|
м |
см |
Н/см |
град |
с |
Н |
| 6.1 |
0,5 |
4 |
0,1 |
0,3 |
5 |
1,5 |
45 |
- |
1 |
1,2cos 0,5t |
|
Механика |
|
|
300₽ |
|
|
10858 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
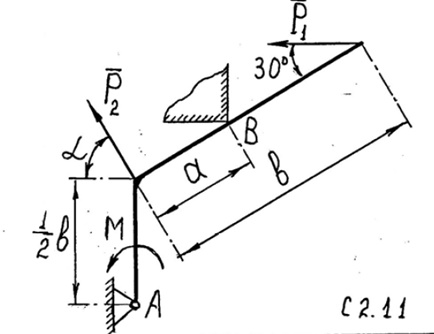
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.11, -исходные данные приведены в таблице 2.
| Номер варианта |
Р1, кН |
P2, кН |
P3, кН |
M кН∙м |
a, м |
b, м |
α, град |
| С-2.11. |
4 |
7 |
0 |
5 |
0.5 |
1.2 |
60° |
|
Теоретическая механика |
C2.11. |
Теоретическая механика 2 |
300₽ |
|
|
11244 |
КИНЕМАТИКА ТОЧКИ
Точка М движется по окружности радиуса R согласно уравнению S = S(t). Определить и построить для момента времени t1 скорость, касательное, нормальное и полное ускорение этой точки. Исходные данные для расчета приведены в табл. 2.
| № варианта |
S = S(t), cм |
R, см |
Время t1, с |
| К2.3 |
4t3 |
24 |
3 |
|
Теоретическая механика |
K2.3 |
Теоретическая механика 2 |
300₽ |
|
|
5101 |
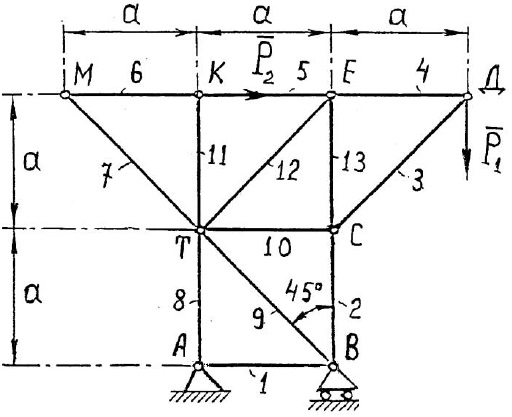
 ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
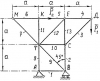
Определить усилия в стержнях плоской фермы рис. С3.6 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| С3.10 |
7, 11, 5 |
1, 2 |
160 |
100 |
В задаче № С 3.10 нужно поменять местами подвижный и неподвижный шарнир.
|
Теоретическая механика |
C3.10_1 |
Теоретическая механика |
300₽ |
|
|
16666 |
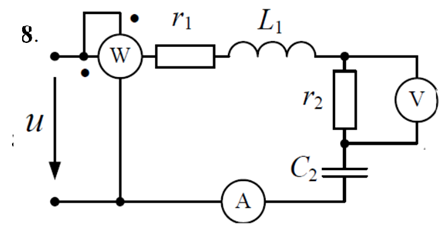
САМОСТОЯТЕЛЬНАЯ РАБОТА 3
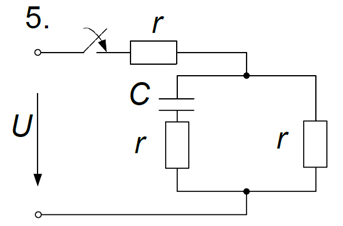
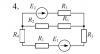
Расчёт неразветвлённой электрической цепи постоянного тока
Необходимо:
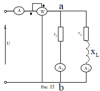
1. Определить показания приборов, указанных на схеме
2. Определить закон изменения тока Б цепи.
3. Определить закон изменения напряжения между точками, к которым подключен вольтметр.
4. Построить векторную диаграмм токов и напряжений
5. Определять активную и реактивную мощности источника, активную и реактивную мощности приемников. Составить и оценить баланс активной н реактивной мощностей.
6. Определить характер (индуктивность, емкость) и параметры элемента, который должен быть включен в цепь для того, чтобы в ней имел место резонанс напряжений.
Примечание. Ваттметр измеряет активную мощность цепи.
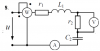
Напряжение на зажимах цепи, вариант которой соответствует последней цифре учебного шифра студента и изображенной на рис, изменяется по закону $u=U_m\cdot \sin{\omega t}$. Амплитудное значение напряжения Um, значения активных сопротивлений r1 и r2, индуктивностей катушек L1 и L2, емкостей конденсаторов C1 и C2 приведены в таблице. Частота питающего напряжения f = 50 Гц.
| Параметр цепи |
Предпоследняя цифра учебного шифра студента |
| 9 |
| Um, В |
320 |
| Ψ, град |
35 |
| r1, Ом |
9 |
| r2, Ом |
5 |
| L1, Гн |
0,03 |
| L2, Гн |
0,04 |
| C1, мкФ |
500 |
| C2, мкФ |
200 |
|
Электротехника |
|
|
300₽ |
|
|
8120 |

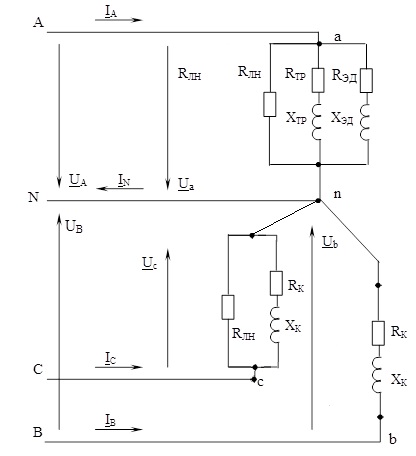
ЗАДАНИЕ № 2 «РАСЧЕТ ТРЁХФАЗНОЙ ЦЕПИ»
3.1. Внутри здания сети внутреннего электроснабжения выполнены по схеме "звезда" с нейтральным проводом. Отдельные помещения подключены к разным фазам трехфазного источника электроэнергии с линейным напряжением Uл = 380 В и частотой тока f = 50 Гц. На основании данных табл. 3.1 - 3.2 определить для своего варианта (последняя цифра трехзначного варианта из предыдущего задания – номер строки в табл. 3.2, предпоследняя цифра – номер строки в табл. 3.1) нагрузку каждой фазы, причем электропотребители в фазе включаются параллельно. Считая лампу накачивания (ЛН) активной нагрузкой, калорифер (К), электродвигатель (ЭД) и трансформатор (ТР) активно-индуктивной нагрузкой, начертить электрическую схему замещения рассчитываемой трехфазной цепи для своего варианта.
3.2. Выполнить анализ электрического состояния полученной в п. 3.1 схемы при наличии нейтрального провода:
1) определить активное, реактивное и полное сопротивления каждого электропотребителя;
2) рассчитать токи, протекающие через каждый электропотребитель (токи в параллельных ветвях каждой фазы);
3) определить для каждой фазы полное сопротивление, активную, реактивную и полную мощность, коэффициент мощности;
4) рассчитать линейные токи и ток в нейтральном проводе;
5) определить для всей трехфазной нагрузки активную PН, реактивную QН и полную SН мощности, коэффициент мощности cos φH и составить баланс мощностей;
6) построить в масштабе совмещенную векторную диаграмму напряжений и токов.
Таблица 3.1. Вид нагрузки в фазах
| Номер строки |
Электроприемники в фазах |
| Фаза A |
Фаза B |
Фаза C |
| 8 |
ЛН, ТР, ЭД |
К |
ЛН, К |
Таблица 3.2. Параметры нагрузки
| Номер строки |
ЛН |
К |
ТР |
Эд |
| PЛН |
PК |
cos φК |
SТР |
cos φТР |
PЭД |
КПД |
cos φЭД |
| 8 |
75 |
1600 |
0,96 |
160 |
0,5 |
400 |
0,70 |
0,75 |
3.3. Примечания:
1. Для всех токов и напряжений определить действующее значение и начальную фазу.
2. На схеме замещения изображать активную нагрузку в виде резистора, активно-индуктивную нагрузку в виде последовательного соединения резистора и идеальной индуктивной катушки.
3. Баланс мощностей должен сойтись с погрешностью менее 1%.
|
Электротехника |
|
|
300₽ |
|
|
18267 |

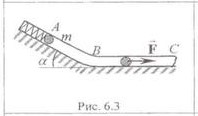
Шарик массы m движется из положения A внутри изогнутой трубки, расположенной в вертикальной плоскости. Шарик, пройдя путь l0, отделяется oт пружины. В точке B шарик, не меняя значения своей скорости, переходит на участок BC, где на него дополнительно действует переменная сила F, направление которой указано на рисунке. Пользуясь общими теоремами динамики точки, определить скорость шарика в положениях B и C. В задании принята следующие обозначения: vA - начальная скорость шарика, AB - длина участка, τ - время движения на участке BC, f - коэффициент трения скольжения шарика по стенке трубки, c - коэффициент жесткости пружины.
| № |
Рис. |
m |
vA |
f |
AB |
l0 |
c |
α |
β |
τ |
F(t) |
| 3 |
|
кг |
м/с |
|
м |
см |
Н/см |
град |
с |
Н |
| 6.3 |
0,3 |
5,5 |
0,2 |
1,1 |
20 |
1,8 |
30 |
- |
1,2 |
0,5cos 3t |
|
Механика |
|
|
300₽ |
|
|
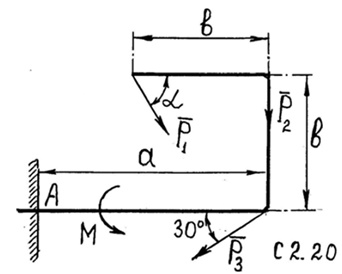
10874 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
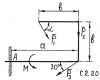
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.20, -исходные данные приведены в таблице 2.
| Номер варианта |
Р1, кН |
P2, кН |
P3, кН |
M кН∙м |
a, м |
b, м |
α, град |
| С-2.20. |
6 |
6 |
9 |
4 |
1.3 |
0.8 |
60° |
|
Теоретическая механика |
C2.20. |
Теоретическая механика 2 |
300₽ |
|
|
13814 |
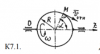
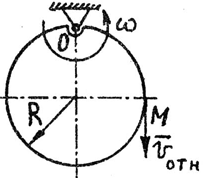
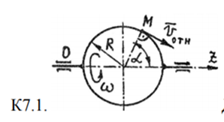
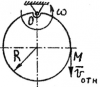
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
Диск радиуса R = 0,3 м вращается вокруг оси 0Z с угловой скоростью ω = 2 с-1. По его ободу движется точка с постоянной скоростью Vотн = 0,3 м/с. Определить абсолютную скорость точки в указанном положении, если угол α = 60°.
|
Теоретическая механика |
K7.1 |
Теоретическая механика 2 |
300₽ |
|
|
11276 |
КИНЕМАТИКА ТОЧКИ
Точка М движется по окружности радиуса R согласно уравнению S = S(t). Определить и построить для момента времени t1 скорость, касательное, нормальное и полное ускорение этой точки. Исходные данные для расчета приведены в табл. 2.
| № варианта |
S = S(t), cм |
R, см |
Время t1, с |
| К2.18 |
4t - 6t2 |
2t |
0,5 |
|
Теоретическая механика |
K2.18 |
Теоретическая механика 2 |
300₽ |
|
|
5040 |
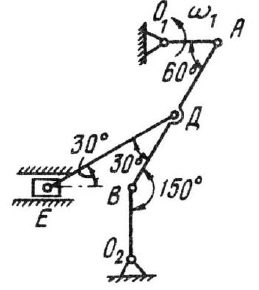
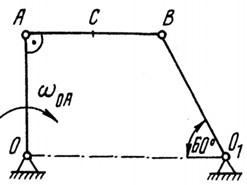
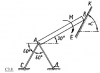
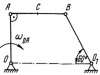
 ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
На рис. К3.8 показаны схемы механизмов, причем
О1А = L1 = 0,4 м;
АВ = L2 = 1,4 м;
ДE = L3 = 1,2 м;
02В = L4 = 0,6 м;
АД = ДВ.
Кривошип O1А вращается вокруг оси O1 с постоянной угловой скоростью ω1 = ωOA =4 с-1. Для заданного положения механизма построить мгновенные центры скоростей шатунов АВ и ДЕ, найти скорости точек А, В, Д, Е, угловые скорости указанных шатунов и кривошипа О2В, а также ускорение точки В.
|
Теоретическая механика |
K5.8 |
Теоретическая механика 2 |
300₽ |
|
|
14320 |
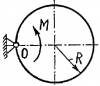
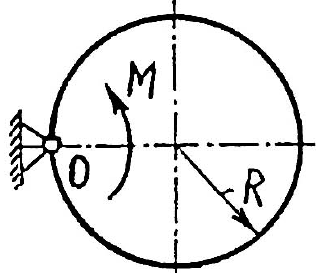
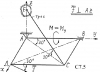
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА. ДИФФЕРЕНЦИАЛЬНОЕ УРАВНЕНИЕ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ ТВЁРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ОСИ
Круглая горизонтальная платформа вращается без трения вокруг неподвижной вертикальной оси О, перпендикулярной к ее плоскости, под действием пары сил с моментом М (пара сил лежит в плоскости платформы). Платформа представляет однородный диск радиусом R и массой m. В начальный момент платформа неподвижна. Определить закон вращательного движения платформы.
|
Теоретическая механика |
Д5.2 |
Теоретическая механика 2 |
300₽ |
|
|
12588 |
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Для заданного положения механизма найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис. К6.13.
AB = 0,8 м; AC = 0,4 м; OB = 1 м; r = 0,25 м; vA =1 м/с.
|
Теоретическая механика |
K6.13 |
Теоретическая механика 2 |
300₽ |
|
|
8582 |
ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Винт совершившего посадку самолета с момента выключения мотора совершил до остановки 100 оборотов. Начальная скорость винта соответствовала 1200 об/мин. Сколько времени прошло с момента выключения мотора до остановки винта, если считать его вращение равно замедленным?
|
Фотоэффект |
K4.3 |
Теоретическая механика 2 |
300₽ |
|
|
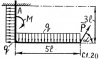
14804 |
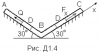
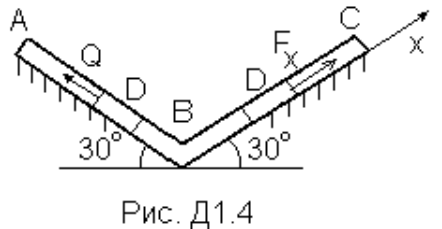
Груз D массой m, получив в точке A начальную скорость v0, движется в изогнутой трубе АВС, расположенной в вертикальной плоскости; участки трубы или оба наклонные, или один горизонтальный, а другой наклонный (рис.3.1, табл. 3.2).
На участке АВ на груз кроме силы тяжести действуют постоянная сила Q (ее направление показано на рисунках).
В точке B груз, не изменяя своей скорости, переходит на участок BC трубы, где на него кроме силы тяжести действует переменная сила F, проекция которой Fx на ось х задана в таблице.
Считая груз материальной точкой и зная время t1 движения груза от точки A до точки B, найти скорость груза на участке BC через t2 = 2 сек. после выхода из точки B. Трением груза о трубу пренебречь.
| Вариант |
m, кг |
v0, м/c |
Q, Н |
t1, с |
Fx, Н |
| 4 |
6 |
15 |
12 |
1 |
t3 |
|
Теоретическая механика |
Д1-4 |
Методичка по термеху. Нижний Новгород. 2019 год |
300₽ |
|
|
18275 |

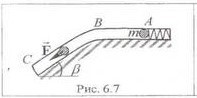
Шарик массы m движется из положения A внутри изогнутой трубки, расположенной в вертикальной плоскости. Шарик, пройдя путь l0, отделяется oт пружины. В точке B шарик, не меняя значения своей скорости, переходит на участок BC, где на него дополнительно действует переменная сила F, направление которой указано на рисунке. Пользуясь общими теоремами динамики точки, определить скорость шарика в положениях B и C. В задании принята следующие обозначения: vA - начальная скорость шарика, AB - длина участка, τ - время движения на участке BC, f - коэффициент трения скольжения шарика по стенке трубки, c - коэффициент жесткости пружины.
| № |
Рис. |
m |
vA |
f |
AB |
l0 |
c |
α |
β |
τ |
F(t) |
| 7 |
|
кг |
м/с |
|
м |
см |
Н/см |
град |
с |
Н |
| 6.7 |
0,8 |
5 |
0,07 |
0,9 |
10 |
1,2 |
- |
45 |
1 |
0,5cos 1,7t |
|
Механика |
|
|
300₽ |
|
|
8792 |
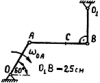
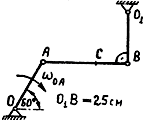
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис.
OA = 25 см = 0,25 м; AB = 40 см = 0,40 м; AC = 25 см = 0,25 м; ωOA = 5 c-1; OB1 = 25 см.
|
Теоретическая механика |
K6.9 |
Теоретическая механика 2 |
300₽ |
|
|
10890 |
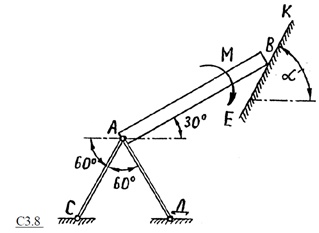
ОПРЕДЕЛЕНИЕ РЕАКЦИИ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
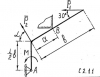
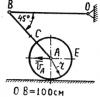
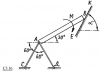
Схемы конструкций построены на рис. СЗ. 1 - С3.20. Однородная балка длиной l и весом P нагружена парой сил с моментом M и удерживается под углом 30° к горизонту невесомыми стержнями AC и AD и наклонной плоскостью EK. Определить давление балки на опорную плоскость и усилия в стержнях. P = 20 кН; M = 10 кН∙м; l = 4 м; α = 60°.
|
Теоретическая механика |
C3.8. |
Теоретическая механика 2 |
300₽ |
|
|
5051 |
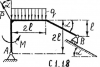
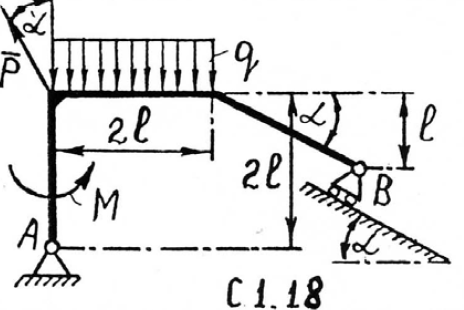
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции. Схемы конструкций указаны на рисунке С 1.8, исходные данные приведены в табл.
| Номер варианта |
P, кН |
G, кН |
M, кНм |
q, кН/м |
l, м |
α, град. |
| C1.18 |
14 |
- |
6 |
2 |
1 |
30° |
|
Теоретическая механика |
C1.18 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
8598 |
ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Тело начинает вращаться равноускоренно из состояния покоя. В тот момент, когда его угловая скорость численно равна углу поворота, оно делает 120 об/мин. Чему равно угловое ускорение тела и сколько оборотов оно сделало за первые 15 с? Найти линейную скорость точки тела, а также ее нормальное, касательное и полное ускорения в указанный момент времени при условии, что точка находится от оси вращения на расстоянии 0.4 м.
|
Теоретическая механика |
K4.20 |
Теоретическая механика 2 |
300₽ |
|
|
8688 |

ПРИНЦИП ДАЛАМБЕРА
Однородная проволочная полуокружность массой m радиусом R вращается с постоянной угловой скоростью ω вокруг оси ОА (оси Оу). Определить реакции в точках крепления В и D кольца к стержню OA. Расстояние от центра тяжести полукольца до оси ОA: $$x_C=\frac{2R}{3\pi}$$.
|
Теоретическая механика |
Д6.3 |
Теоретическая механика 2 |
300₽ |
|
|
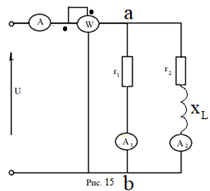
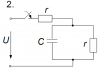
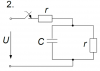
16724 |
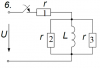
В сеть переменного тока напряжением U включена цепь, состоящая из двух параллельных ветвей с сопротивлением r1, r2 и xL (рис. 15, табл. 20). Определить показания измерительных приборов, реактивную мощность цепи, построить векторную диаграмму.
Таблица 20
| Номер варианта |
U, В |
r1, Ом |
r2, Ом |
xL, Ом |
| 7 |
400 |
40 |
7 |
10 |
|
Электротехника |
|
|
300₽ |
|
|
10906 |
ОПРЕДЕЛЕНИЕ РЕАКЦИИ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
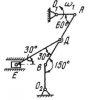
Схемы конструкций построены на рис. СЗ. 1 - С3.20.
Однородная балка AB длиной l и весом P нагружена парой сил с моментом M и удерживается под углом 30° к горизонту невесомыми стержнями AC и AD и наклонной плоскостью EK. Определить давление балки на опорную плоскость и усилия в стержнях.
P = 25 кН; М =12 кН∙м; l = 5 м; α = 45°.
|
Теоретическая механика |
C3.16. |
Теоретическая механика 2 |
300₽ |
|
|
16764 |
Правильный треугольник со стороной 3 и правильный треугольник со стороной 4 в пересечении дают выпуклый шестиугольник периметра 7. Докажите, что у треугольников соответствующие стороны параллельны.
|
Геометрия |
|
|
300₽ |
|
|
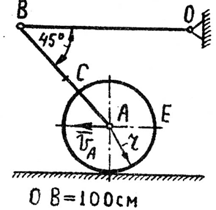
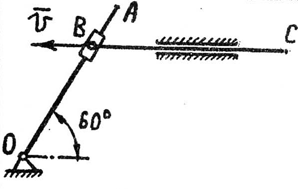
5066 |
Стержень ВС кулисного механизма движется со скоростью v = 1 м/с. Для указанного положения механизма определить угловую скорость кулисы ОА, если расстояние ОВ = 0,7 м
|
Теоретическая механика |
K7.6 |
Теоретическая механика 2 |
300₽ |
|
|
8614 |

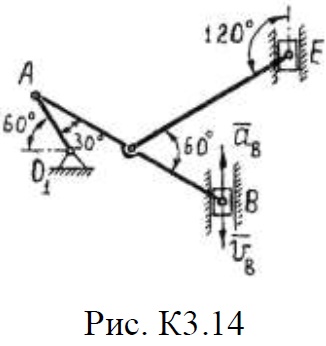
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
На рис. К3.14 показана схема механизма, причем
О1А = L1 = 0,4 м;
АВ = L2 = 1,4 м;
ДE = L3 = 1,2 м;
O2В = L4 = 0,6 м;
АД = ДВ.
Ползун в данном положении механизма имеет скорость VB = 4 м/с и ускорение aB = 6 м/с2. Для заданного положения механизма построить мгновенные центры скоростей шатунов АВ и ДЕ, найти скорости точек А, Д, Е, угловые скорости указанных шатунов и кривошипа О1А, а также ускорение точки А.
|
Теоретическая механика |
K5.14 |
Теоретическая механика 2 |
300₽ |
|
|
11072 |
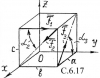
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C6.17 |
Теоретическая механика 2 |
300₽ |
|
|
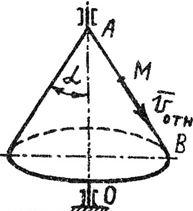
5130 |
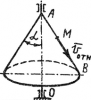
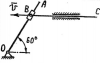
Конус вращается вокруг оси OZ с постоянной угловой скоростью ω = 3 с-1. По его образующей с постоянной скоростью vотн = 2 м/с движется точка М в направлении от А к В (рис. К 2.8). Определить абсолютную скорость этой точки в положении, когда расстояние АМ = 0,8 м, если угол α =30°.
|
Теоретическая механика |
K7.18 |
Теоретическая механика 2 |
300₽ |
|
|
14030 |
При небольших скоростях сила сопротивления движению поезда выражается формулой $R=P+k \cdot v$, где Р и к — постоянные величины, v — скорость поезда. Найти закон движения поезда при его разгоне, если сила тяги электропоезда равна Т, а масса поезда равна m.
|
Теоретическая механика |
Д2.1 |
Теоретическая механика 2 |
300₽ |
|
|
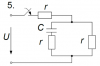
12308 |
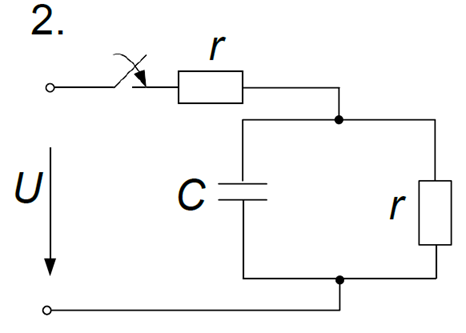
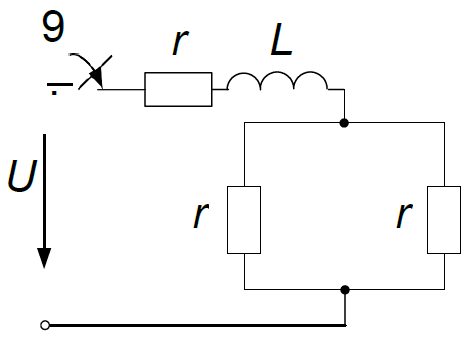
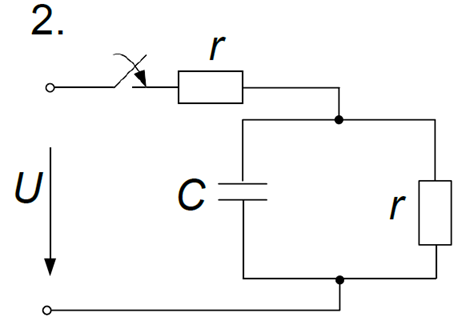
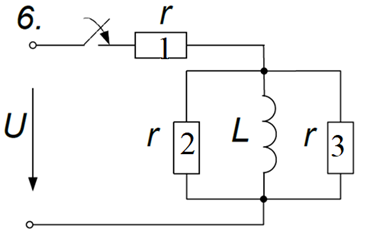
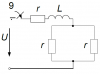
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 1 |
15 |
- |
100 |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
112 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
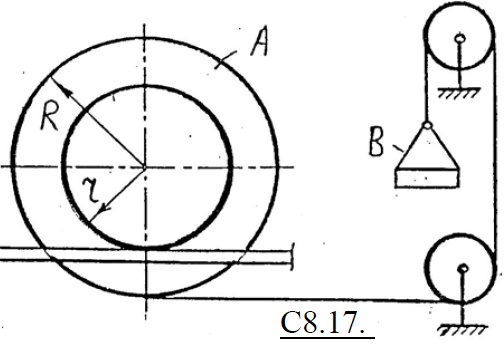
11152 |
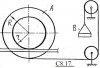
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
Расчетные схемы даны на рис. С8.17. Катушка A весом P лежит на горизонтальной плоскости. Определить наибольший вес Qmax груза B, при котором возможно равновесие. Радиусы катушки равны r и R, а ее коэффициент трения качения равен δ.
|
Теоретическая механика |
C8.17 |
Теоретическая механика 2 |
300₽ |
|
|
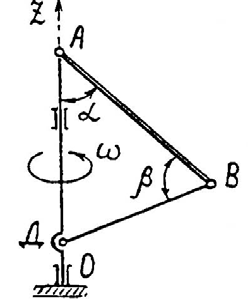
3290 |

ПРИНЦИП ДАЛАМБЕРА
Тонкий однородный стержень АВ массой m и длиной l вращается с постоянной угловой скоростью ω вокруг вертикальной оси ОО1 (оси Оy). Стержень закреплен на оси вращения при помощи шарнира А и невесомого стержня ВД; положение стержня АВ определяется углами α и β. Определить реакции связей стержня АВ.
|
Теоретическая механика |
Д6.7 |
Теоретическая механика 2 |
300₽ |
|
|
12390 |
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 3 |
20 |
- |
40 |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
135 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
11232 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.17 |
4cos(2πt) |
6sin(2πt) |
1/3 |
|
Теоретическая механика |
K1.17 |
Теоретическая механика 2 |
300₽ |
|
|
10448 |
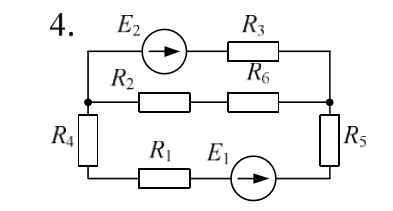
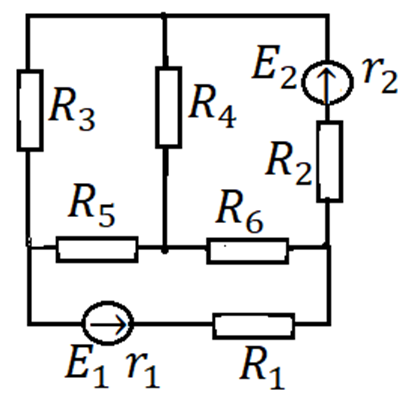
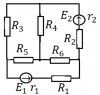
Расчет разветвленной линейной электрической цепи постоянного тока с несколькими источниками электрической энергии.
Для электрической цепи, вариант которой соответствует последней цифре учебного шифра студента и изображенной на рис. 2, выполнить следующее:
1. Составить уравнения для определения токов путем непосредственного применения законов Кирхгофа (указав, для каких узлов и контуров эти уравнения записаны). Решать эту систему уравнений не следует.
2. Определить токи в ветвях методом контурных токов.
3. Определить режимы работы активных элементов и составить баланс мощностей.
Значения ЭДС источников и сопротивлений приемников приведены в табл. 2.
| Предпоследняя цифра учебного шифра студента |
E1, В |
E2, В |
R1, Ом |
R2, Ом |
R3, Ом |
R4, Ом |
R5, Ом |
R6, Ом |
| 7 |
120 |
140 |
10 |
8 |
13 |
20 |
15 |
21 |
|
Электротехника |
274 |
МИИТ. Общая электротехника и электроника. 2016 год |
300₽ |
|
|
12470 |
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 8 |
20 |
80 |
- |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
189 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
14610 |
ПЛОСКО-ПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Для заданного положения механизма найти скорости точек В и С, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис. К6.1-К6.20
ОА = 30 см, АВ = 40 см, АС = 20 см, ωОА = 2 с-1
|
Теоретическая механика |
K6.16 |
Теоретическая механика 2 |
300₽ |
|
|
16579 |

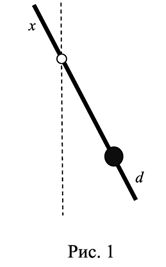
Физический маятник представляет собой тонкий однородный стержень длиной l = 1 м и массой m, на котором жестко закреплена материальная точка массой M на расстоянии d (d < l/2) от нижнего конца стержня. Точка подвеса маятника находится на расстоянии x (x < l/2) от верхнего конца стержня (рис. 1). Найти зависимость периода малых колебаний T маятника от расстояния x и построить график этой зависимости T(x) в интервале изменения x от 0 до l/2. Определить по графику минимальное значение периода T колебаний маятника. Ускорение свободного падения g = 9,81 м/c2.
| № варианта |
d, M/m |
| 9 |
d = 0,25 м, M/m = 0,5 |
|
Механика |
|
|
300₽ |
|
|
8458 |
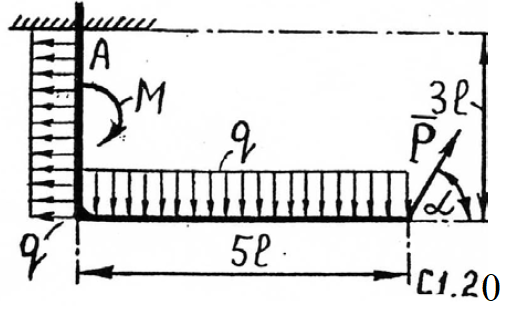
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции. Схемы конструкций указаны на рисунке С1.10, исходные данные приведены в таблице.
| Номер варианта |
P, кН |
G, кН |
M, кНм |
q, кН/м |
l, м |
α, град |
| C1.20 |
16 |
- |
10 |
3 |
1 |
60° |
|
Теоретическая механика |
C1.20 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
8550 |

ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунках С4.16.
|
Теоретическая механика |
C4.16_1 |
Теоретическая механика |
300₽ |
|
|
15900 |
Расчет линейных электрических цепей постоянного тока
1.Записать систему уравнений для определения токов в ветвях путем непосредственного применения законов Кирхгофа;
2. Определить токи во всех ветвях методом контурных токов;
3. Определить токи во всех ветвях методом узловых напряжений;
4. Выполнить сравнение результатов полученных в п.1, п.2, п. 3, данной задачи;
5. Составить баланс мощностей;
6. Построить потенциальную диаграмму для замкнутого контура, включающего в себя все э.д.с.
| E1, В |
r1, Ом |
E2, В |
r2, Ом |
R1, Ом |
R2, Ом |
R3, Ом |
R4, Ом |
R5, Ом |
R6, Ом |
| 130 |
2 |
110 |
1 |
4 |
8 |
21 |
16 |
19 |
16 |
|
Электростатика |
94 |
Разветвлённая электрическая цепь постоянного тока |
300₽ |
|
|
11008 |

ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. C5.5 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| C5.5 |
1, 6, 4 |
2, 3 |
120 |
80 |
|
Теоретическая механика |
C5.5 |
Теоретическая механика 2 |
300₽ |
|
|
11088 |
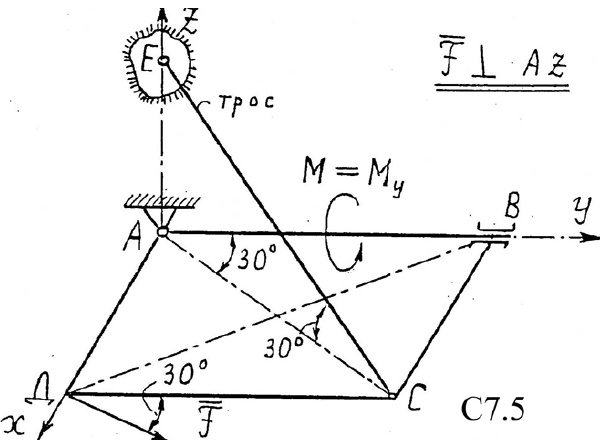
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунке.
|
Теоретическая механика |
C7.5 |
Теоретическая механика 2 |
300₽ |
|
|
12324 |
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 9 |
25 |
- |
75 |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
192 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
11168 |
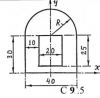
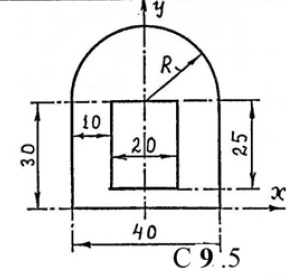
ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ОДНОРОДНОГО ТЕЛА
Найти положение центра тяжести плоской фермы, пластинки и объемного тела. Ферма состоит из однородных стержней; пластинка имеет малую постоянную толщину. Схемы тел показаны на рис. C9.5. Размеры ферм даны в метрах, остальных тел - в сантиметрах.
|
Теоретическая механика |
C9.5 |
Теоретическая механика 2 |
300₽ |
|
|
13336 |
Шар массой m1, летящий со скоростью v1, сталкивается с неподвижным шаром массой m2. После удара шары разлетаются под углом α друг к другу. Удар абсолютно упругий, столкновение происходит в горизонтальной плоскости. Найти скорости шаров u1 и u2 после удара.
| № варианта |
m1, v1, m2, α |
| 8 |
m1 = 100 г, v1 = 10 м/с, m2 = 180 г, α = 125° |
|
ФИЗИКА |
3-3-8 |
ТГУ. Практические занятия по физике. 2019 год |
300₽ |
|
|
12406 |
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 6 |
10 |
20 |
- |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
166 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
8384 |
ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Угол наклона полного ускорения точки обода махового колеса к радиусу равен 30°. Нормальное ускорение точки в данный момент $a_n = 10 \sqrt 3$ м/с2. Найти касательное и полное ускорение точки, отстоящей от оси вращения на расстоянии r = 0,6 м. Радиус махового колеса R = 1 м.
|
Теоретическая механика |
K4.5 |
Теоретическая механика 2 |
300₽ |
|