|
10728 |
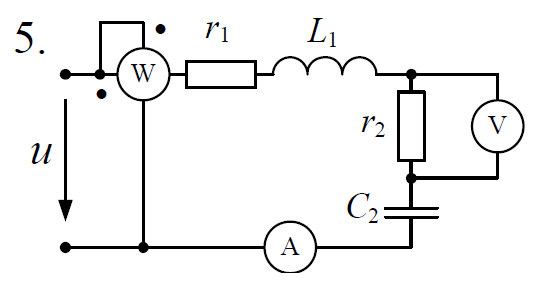
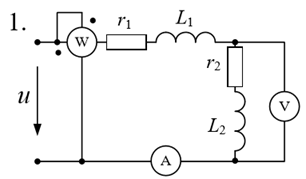
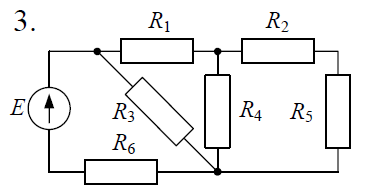
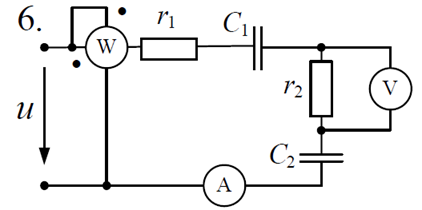
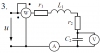
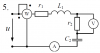
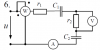
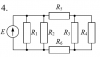
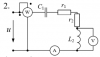
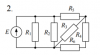
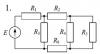
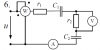
Расчет неразветвленной линейной цепи переменного тока.
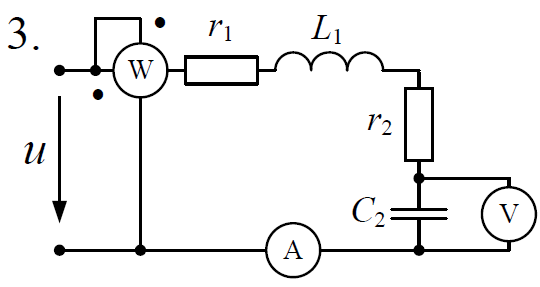
Напряжение на зажимах цепи, вариант которой соответствует последней цифре учебного шифра студента и изображенной на рис. 3, изменяется по закону $u=U_m \cdot \sin{\omega t}$. Амплитудное значение напряжения Um, значения активных сопротивлений r1 и r2, индуктивностей катушек L1 и L2, емкостей конденсаторов C1 и C2 приведены в табл. 3.
Частота питающего напряжения f = 50 Гц.
Необходимо:
1. Определить показания приборов, указанных на схеме рис. 3.
2. Построить векторную диаграмму токов и напряжений.
3. Определить закон изменения тока в цепи.
4. Определить закон изменения напряжения между точками, к которым подключен вольтметр.
5. Определить активную, реактивную и полную мощности источника, активную, реактивную и полную мощности приемников. Составить и оценить баланс мощностей. Рассчитать коэффициент мощности.
6. Определить характер (индуктивность, емкость) и параметры элемента, который должен быть включен в электрическую цепь для того, чтобы в ней имел место резонанс напряжений.
| Предпоследняя цифра учебного шифра студента |
Um, В |
r1, Ом |
r2, Ом |
L1, Гн |
L2, Гн |
C1, мкФ |
C2, мкФ |
| 1 |
180 |
4 |
16 |
0,02 |
0,03 |
300 |
250 |
|
Электротехника |
317 |
МИИТ. Общая электротехника и электроника. 2016 год |
250₽ |
|
|
12866 |
С наклонной плоскости h, составляющей угол α с горизонтом, соскальзывает с начальной скоростью, равной нулю, шайба массой m1 после схода с наклонной плоскости ударяющаяся абсолютно упруго о неподвижную шайбу массой m2, которая после удара проходит по горизонтальной поверхности путь S. При движении обеих шайб коэффициент трения одинаков и равен К. Определить параметр, обозначенный в таблице данных для Вашего варианта знаком «?».
| Номер варианта |
h, м |
α, град |
m1, кг |
m2, кг |
k |
S, м |
| 12 |
0,8 |
30 |
0,4 |
0,7 |
0,2 |
? |
|
Механика |
4-12 |
ЗабГУ. Физика. 2011 год |
250₽ |
|
|
18066 |
Система, состоящая из диска массой m, насаженного на ось, поддерживается двумя нитями. При вращении диска нити наматываются на ось и диск поднимается. Предоставленный самому себе диск опускается, раскручивая нить. Дойдя до нижнего положения и продолжая двигаться по инерции, диск снова поднимается вверх. Момент инерции системы равен J, радиус оси r, ускорение поступательного движения системы равно a, угловое ускорение равно ε. Сила натяжения каждой нити равна T. Определить величины, указанные в таблице знаком вопроса
| Номер варианта |
m, кг |
J, кг∙м2 |
r, м |
a, м/с2 |
ε, c2 |
T, H |
| 449 |
? |
0,0025 |
0,005 |
- |
- |
4,78 |
|
Механика |
|
|
250₽ |
|
|
10664 |
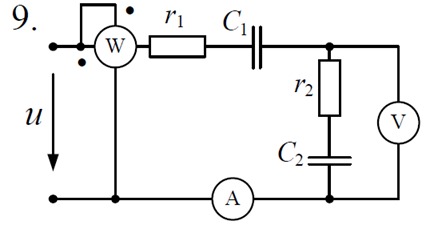
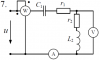
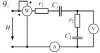
Расчет неразветвленной линейной цепи переменного тока.
Напряжение на зажимах цепи, вариант которой соответствует последней цифре учебного шифра студента и изображенной на рис. 3, изменяется по закону $u=U_m \cdot \sin{\omega t}$. Амплитудное значение напряжения Um, значения активных сопротивлений r1 и r2, индуктивностей катушек L1 и L2, емкостей конденсаторов C1 и C2 приведены в табл. 3.
Частота питающего напряжения f = 50 Гц.
Необходимо:
1. Определить показания приборов, указанных на схеме рис. 3.
2. Построить векторную диаграмму токов и напряжений.
3. Определить закон изменения тока в цепи.
4. Определить закон изменения напряжения между точками, к которым подключен вольтметр.
5. Определить активную, реактивную и полную мощности источника, активную, реактивную и полную мощности приемников. Составить и оценить баланс мощностей. Рассчитать коэффициент мощности.
6. Определить характер (индуктивность, емкость) и параметры элемента, который должен быть включен в электрическую цепь для того, чтобы в ней имел место резонанс напряжений.
| Предпоследняя цифра учебного шифра студента |
Um, В |
r1, Ом |
r2, Ом |
L1, Гн |
L2, Гн |
C1, мкФ |
C2, мкФ |
| 9 |
320 |
7 |
5 |
0,03 |
0,04 |
500 |
200 |
|
Электротехника |
393 |
МИИТ. Общая электротехника и электроника. 2016 год |
250₽ |
|
|
10744 |
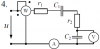
Расчет неразветвленной линейной цепи переменного тока.
Напряжение на зажимах цепи, вариант которой соответствует последней цифре учебного шифра студента и изображенной на рис. 3, изменяется по закону $u=U_m \cdot \sin{\omega t}$. Амплитудное значение напряжения Um, значения активных сопротивлений r1 и r2, индуктивностей катушек L1 и L2, емкостей конденсаторов C1 и C2 приведены в табл. 3.
Частота питающего напряжения f = 50 Гц.
Необходимо:
1. Определить показания приборов, указанных на схеме рис. 3.
2. Построить векторную диаграмму токов и напряжений.
3. Определить закон изменения тока в цепи.
4. Определить закон изменения напряжения между точками, к которым подключен вольтметр.
5. Определить активную, реактивную и полную мощности источника, активную, реактивную и полную мощности приемников. Составить и оценить баланс мощностей. Рассчитать коэффициент мощности.
6. Определить характер (индуктивность, емкость) и параметры элемента, который должен быть включен в электрическую цепь для того, чтобы в ней имел место резонанс напряжений.
| Предпоследняя цифра учебного шифра студента |
Um, В |
r1, Ом |
r2, Ом |
L1, Гн |
L2, Гн |
C1, мкФ |
C2, мкФ |
| 9 |
320 |
7 |
5 |
0,03 |
0,04 |
500 |
200 |
|
Электротехника |
397 |
МИИТ. Общая электротехника и электроника. 2016 год |
250₽ |
|
|
12882 |
С наклонной плоскости h, составляющей угол α с горизонтом, соскальзывает с начальной скоростью, равной нулю, шайба массой m1 после схода с наклонной плоскости ударяющаяся абсолютно упруго о неподвижную шайбу массой m2, которая после удара проходит по горизонтальной поверхности путь S. При движении обеих шайб коэффициент трения одинаков и равен К. Определить параметр, обозначенный в таблице данных для Вашего варианта знаком «?».
| Номер варианта |
h, м |
α, град |
m1, кг |
m2, кг |
k |
S, м |
| 20 |
6 |
45 |
0,6 |
? |
0,1 |
60 |
|
Механика |
4-20 |
ЗабГУ. Физика. 2011 год |
250₽ |
|
|
13282 |
Груз массой m подвешен на невесомой нерастяжимой нити в поле силы тяжести. Нить с грузом отклонили от вертикали на угол α и отпустили. Найти зависимость от угла α силы натяжения нити T в момент прохождения грузом положения равновесия. Построить график этой зависимости в интервале изменения угла α от 0 до 180°. Найти максимальную силу натяжения T. Ускорение свободного падения g = 9,81 м/с2.
|
ФИЗИКА |
3-2-1 |
ТГУ. Практические занятия по физике. 2019 год |
250₽ |
|
|
13364 |

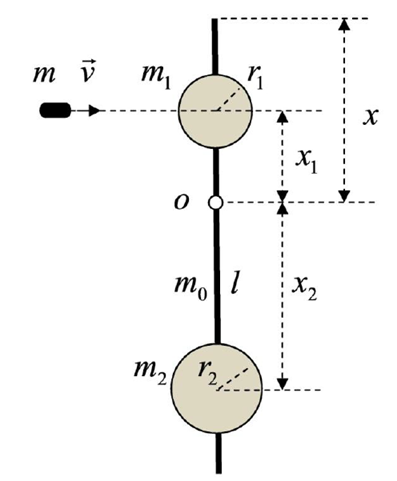
Тонкий однородный стержень массой m0 = 1 кг и длиной l = 4 м может вращаться в вертикальной плоскости вокруг горизонтальной оси O в поле силы тяжести (Рис. 3). Расстояние от верхнего конца стержня до оси вращения x = 1 м. На стержне жестко закреплены два однородных шара массами m1 = 1 кг и m2 = 3 кг и радиусами r1 = 10 см и r2 = 20 см. В равновесии первый шар находится над осью вращения, второй – под ней. Расстояния от центров шаров до оси вращения – x1 и x2 соответственно. В центр одного из шаров попадает пуля массой m = 30 г, летящая горизонтально со скоростью v = 500 м/с и застревает в нем. Масса пули много меньше массы шаров. Найти максимальный угол α, на который отклонится стержень с шарами после попадания пули. Пулю считать материальной точкой. Ускорение свободного падения g = 9,81 м/с2.
| № вариант |
шар, в который попадает пуля, x1, x2 |
| 1 |
нижний, x1 = 0,3 м, x2 = 2,5 м |
|
ФИЗИКА |
3-4-1 |
ТГУ. Практические занятия по физике. 2019 год |
250₽ |
|
|
10680 |
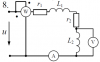
Расчет неразветвленной линейной цепи переменного тока.
Напряжение на зажимах цепи, вариант которой соответствует последней цифре учебного шифра студента и изображенной на рис. 3, изменяется по закону $u=U_m \cdot \sin{\omega t}$. Амплитудное значение напряжения Um, значения активных сопротивлений r1 и r2, индуктивностей катушек L1 и L2, емкостей конденсаторов C1 и C2 приведены в табл. 3.
Частота питающего напряжения f = 50 Гц.
Необходимо:
1. Определить показания приборов, указанных на схеме рис. 3.
2. Построить векторную диаграмму токов и напряжений.
3. Определить закон изменения тока в цепи.
4. Определить закон изменения напряжения между точками, к которым подключен вольтметр.
5. Определить активную, реактивную и полную мощности источника, активную, реактивную и полную мощности приемников. Составить и оценить баланс мощностей. Рассчитать коэффициент мощности.
6. Определить характер (индуктивность, емкость) и параметры элемента, который должен быть включен в электрическую цепь для того, чтобы в ней имел место резонанс напряжений.
| Предпоследняя цифра учебного шифра студента |
Um, В |
r1, Ом |
r2, Ом |
L1, Гн |
L2, Гн |
C1, мкФ |
C2, мкФ |
| 7 |
160 |
6 |
12 |
0,01 |
0,01 |
300 |
200 |
|
Электротехника |
374 |
МИИТ. Общая электротехника и электроника. 2016 год |
250₽ |
|
|
10760 |
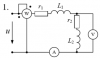
Расчет неразветвленной линейной цепи переменного тока.
Напряжение на зажимах цепи, вариант которой соответствует последней цифре учебного шифра студента и изображенной на рис. 3, изменяется по закону $u=U_m \cdot \sin{\omega t}$. Амплитудное значение напряжения Um, значения активных сопротивлений r1 и r2, индуктивностей катушек L1 и L2, емкостей конденсаторов C1 и C2 приведены в табл. 3.
Частота питающего напряжения f = 50 Гц.
Необходимо:
1. Определить показания приборов, указанных на схеме рис. 3.
2. Построить векторную диаграмму токов и напряжений.
3. Определить закон изменения тока в цепи.
4. Определить закон изменения напряжения между точками, к которым подключен вольтметр.
5. Определить активную, реактивную и полную мощности источника, активную, реактивную и полную мощности приемников. Составить и оценить баланс мощностей. Рассчитать коэффициент мощности.
6. Определить характер (индуктивность, емкость) и параметры элемента, который должен быть включен в электрическую цепь для того, чтобы в ней имел место резонанс напряжений.
| Предпоследняя цифра учебного шифра студента |
Um, В |
r1, Ом |
r2, Ом |
L1, Гн |
L2, Гн |
C1, мкФ |
C2, мкФ |
| 7 |
160 |
6 |
12 |
0,01 |
0,01 |
300 |
200 |
|
Электротехника |
378 |
МИИТ. Общая электротехника и электроника. 2016 год |
250₽ |
|
|
13214 |

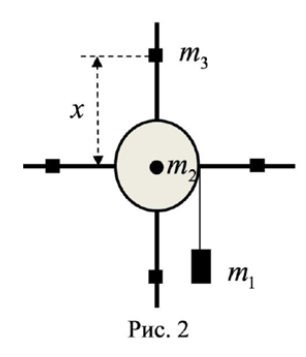
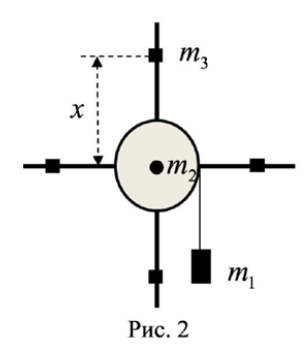
На однородный цилиндрический блок массой m2 и радиусом R намотана невесомая нить, к свободному концу которой прикреплен груз массой m1. К блоку крестообразно прикреплены четыре одинаковых невесомых стержня, на которых закреплены одинаковые грузы массой m3 на расстоянии x от оси вращения (Рис. 2). Грузы m3 можно считать материальными точками. Трением в блоке можно пренебречь. Найти зависимость ускорения a груза m1 от расстояния x. Построить график этой зависимости в интервале изменения x от R до 3R. Ускорение свободного падения g = 9,81 м/с2.
| № варианта |
R, m1, m2, m3 |
| 8 |
R = 0,2 м, m1 = 3 кг, m2 = 1 кг, m3 = 1 кг |
|
ФИЗИКА |
2-3-8 |
ТГУ. Практические занятия по физике. 2019 год |
250₽ |
|
|
13298 |
Груз массой m подвешен на невесомой нерастяжимой нити в поле силы тяжести. Нить с грузом отклонили от вертикали на угол α и отпустили. Найти зависимость от угла α силы натяжения нити T в момент прохождения грузом положения равновесия. Построить график этой зависимости в интервале изменения угла α от 0 до 180°. Найти максимальную силу натяжения T. Ускорение свободного падения g = 9,81 м/с2.
|
ФИЗИКА |
3-2-9 |
ТГУ. Практические занятия по физике. 2019 год |
250₽ |
|
|
13380 |

Тонкий однородный стержень массой m0 = 1 кг и длиной l = 4 м может вращаться в вертикальной плоскости вокруг горизонтальной оси O в поле силы тяжести (Рис. 3). Расстояние от верхнего конца стержня до оси вращения x = 1 м. На стержне жестко закреплены два однородных шара массами m1 = 1 кг и m2 = 3 кг и радиусами r1 = 10 см и r2 = 20 см. В равновесии первый шар находится над осью вращения, второй – под ней. Расстояния от центров шаров до оси вращения – x1 и x2 соответственно. В центр одного из шаров попадает пуля массой m = 30 г, летящая горизонтально со скоростью v = 500 м/с и застревает в нем. Масса пули много меньше массы шаров. Найти максимальный угол α, на который отклонится стержень с шарами после попадания пули. Пулю считать материальной точкой. Ускорение свободного падения g = 9,81 м/с2.
| № вариант |
шар, в который попадает пуля, x1, x2 |
| 9 |
нижний, x1 = 0,3 м, x2 = 0,5 м |
|
ФИЗИКА |
3-4-9 |
ТГУ. Практические занятия по физике. 2019 год |
250₽ |
|
|
10696 |
Расчет неразветвленной линейной цепи переменного тока.
Напряжение на зажимах цепи, вариант которой соответствует последней цифре учебного шифра студента и изображенной на рис. 3, изменяется по закону $u=U_m \cdot \sin{\omega t}$. Амплитудное значение напряжения Um, значения активных сопротивлений r1 и r2, индуктивностей катушек L1 и L2, емкостей конденсаторов C1 и C2 приведены в табл. 3.
Частота питающего напряжения f = 50 Гц.
Необходимо:
1. Определить показания приборов, указанных на схеме рис. 3.
2. Построить векторную диаграмму токов и напряжений.
3. Определить закон изменения тока в цепи.
4. Определить закон изменения напряжения между точками, к которым подключен вольтметр.
5. Определить активную, реактивную и полную мощности источника, активную, реактивную и полную мощности приемников. Составить и оценить баланс мощностей. Рассчитать коэффициент мощности.
6. Определить характер (индуктивность, емкость) и параметры элемента, который должен быть включен в электрическую цепь для того, чтобы в ней имел место резонанс напряжений.
| Предпоследняя цифра учебного шифра студента |
Um, В |
r1, Ом |
r2, Ом |
L1, Гн |
L2, Гн |
C1, мкФ |
C2, мкФ |
| 5 |
300 |
3 |
7 |
0,04 |
0,05 |
500 |
600 |
|
Электротехника |
355 |
МИИТ. Общая электротехника и электроника. 2016 год |
250₽ |
|
|
10778 |
Расчет неразветвленной линейной цепи переменного тока.
Напряжение на зажимах цепи, вариант которой соответствует последней цифре учебного шифра студента и изображенной на рис. 3, изменяется по закону $u=U_m \cdot \sin{\omega t}$. Амплитудное значение напряжения Um, значения активных сопротивлений r1 и r2, индуктивностей катушек L1 и L2, емкостей конденсаторов C1 и C2 приведены в табл. 3.
Частота питающего напряжения f = 50 Гц.
Необходимо:
1. Определить показания приборов, указанных на схеме рис. 3.
2. Построить векторную диаграмму токов и напряжений.
3. Определить закон изменения тока в цепи.
4. Определить закон изменения напряжения между точками, к которым подключен вольтметр.
5. Определить активную, реактивную и полную мощности источника, активную, реактивную и полную мощности приемников. Составить и оценить баланс мощностей. Рассчитать коэффициент мощности.
6. Определить характер (индуктивность, емкость) и параметры элемента, который должен быть включен в электрическую цепь для того, чтобы в ней имел место резонанс напряжений.
| Предпоследняя цифра учебного шифра студента |
Um, В |
r1, Ом |
r2, Ом |
L1, Гн |
L2, Гн |
C1, мкФ |
C2, мкФ |
| 5 |
300 |
3 |
7 |
0,04 |
0,05 |
500 |
600 |
|
Электротехника |
359 |
МИИТ. Общая электротехника и электроника. 2016 год |
250₽ |
|
|
13232 |

На однородный цилиндрический блок массой m2 и радиусом R намотана невесомая нить, к свободному концу которой прикреплен груз массой m1. К блоку крестообразно прикреплены четыре одинаковых невесомых стержня, на которых закреплены одинаковые грузы массой m3 на расстоянии x от оси вращения (Рис. 2). Грузы m3 можно считать материальными точками. Трением в блоке можно пренебречь. Найти зависимость ускорения a груза m1 от расстояния x. Построить график этой зависимости в интервале изменения x от R до 3R. Ускорение свободного падения g = 9,81 м/с2.
| № варианта |
R, m1, m2, m3 |
| 17 |
R = 0,5 м, m1 = 1 кг, m2 = 1 кг, m3 = 1 кг |
|
ФИЗИКА |
2-3-17 |
ТГУ. Практические занятия по физике. 2019 год |
250₽ |
|
|
16845 |
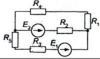
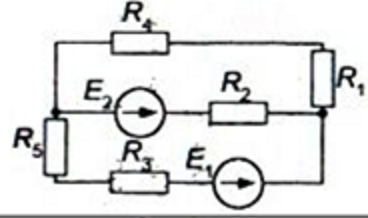
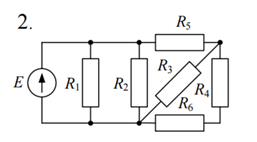
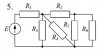
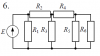
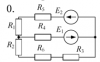
Расчет разветвленной линейной электрической цепи постоянного тока с несколькими источниками электрической энергии.
Для электрической цепи, вариант которой соответствует последней цифре учебного шифра студента и изображенной на рис. 2, выполнить следующее:
1. Составить уравнения для определения токов путем непосредственного применения законов Кирхгофа (указав, для каких узлов и контуров эти уравнения записаны). Решать эту систему уравнений не следует.
2. Определить токи в ветвях методом контурных токов.
3. Определить режимы работы активных элементов и составить баланс мощностей.
Значения ЭДС источников и сопротивлений приемников приведены в табл. 2.
| Предпоследняя цифра учебного шифра студента |
E1, В |
E2, В |
R1, Ом |
R2, Ом |
R3, Ом |
R4, Ом |
R5, Ом
|
| 0 |
6 |
2 |
2 |
6 |
7 |
9 |
3 |
|
Электротехника |
|
|
250₽ |
|
|
13314 |
Груз массой m подвешен на невесомой нерастяжимой нити в поле силы тяжести. Нить с грузом отклонили от вертикали на угол α и отпустили. Найти зависимость от угла α силы натяжения нити T в момент прохождения грузом положения равновесия. Построить график этой зависимости в интервале изменения угла α от 0 до 180°. Найти максимальную силу натяжения T. Ускорение свободного падения g = 9,81 м/с2.
| № варианта |
m |
| 17 |
m = 100 кг |
|
ФИЗИКА |
3-2-17 |
ТГУ. Практические занятия по физике. 2019 год |
250₽ |
|
|
13396 |

Тонкий однородный стержень массой m0 = 1 кг и длиной l = 4 м может вращаться в вертикальной плоскости вокруг горизонтальной оси O в поле силы тяжести (Рис. 3). Расстояние от верхнего конца стержня до оси вращения x = 1 м. На стержне жестко закреплены два однородных шара массами m1 = 1 кг и m2 = 3 кг и радиусами r1 = 10 см и r2 = 20 см. В равновесии первый шар находится над осью вращения, второй – под ней. Расстояния от центров шаров до оси вращения – x1 и x2 соответственно. В центр одного из шаров попадает пуля массой m = 30 г, летящая горизонтально со скоростью v = 500 м/с и застревает в нем. Масса пули много меньше массы шаров. Найти максимальный угол α, на который отклонится стержень с шарами после попадания пули. Пулю считать материальной точкой. Ускорение свободного падения g = 9,81 м/с2.
| № вариант |
шар, в который попадает пуля, x1, x2 |
| 17 |
верхний, x1 = 0,8 м, x2 = 1,0 м |
|
ФИЗИКА |
3-4-17 |
ТГУ. Практические занятия по физике. 2019 год |
250₽ |
|
|
10632 |
Расчет неразветвленной линейной цепи переменного тока.
Напряжение на зажимах цепи, вариант которой соответствует последней цифре учебного шифра студента и изображенной на рис. 3, изменяется по закону $u=U_m \cdot \sin{\omega t}$. Амплитудное значение напряжения Um, значения активных сопротивлений r1 и r2, индуктивностей катушек L1 и L2, емкостей конденсаторов C1 и C2 приведены в табл. 3.
Частота питающего напряжения f = 50 Гц.
Необходимо:
1. Определить показания приборов, указанных на схеме рис. 3.
2. Построить векторную диаграмму токов и напряжений.
3. Определить закон изменения тока в цепи.
4. Определить закон изменения напряжения между точками, к которым подключен вольтметр.
5. Определить активную, реактивную и полную мощности источника, активную, реактивную и полную мощности приемников. Составить и оценить баланс мощностей. Рассчитать коэффициент мощности.
6. Определить характер (индуктивность, емкость) и параметры элемента, который должен быть включен в электрическую цепь для того, чтобы в ней имел место резонанс напряжений.
| Предпоследняя цифра учебного шифра студента |
Um, В |
r1, Ом |
r2, Ом |
L1, Гн |
L2, Гн |
C1, мкФ |
C2, мкФ |
| 6 |
260 |
4 |
5 |
0,03 |
0,01 |
350 |
500 |
|
Электротехника |
361 |
МИИТ. Общая электротехника и электроника. 2016 год |
250₽ |
|
|
16576 |
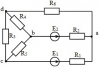
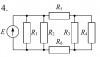
САМОСТОЯТЕЛЬНАЯ PAБOТA 2
Расчёт разветвлённой линейной электрической цепи постоянного тока с несколькими источниками электроэнергии
1. Составить систему уравнений для определения токов цепи с помощью уравнении Кирхгофа.
2. Рассчитать токи в ветвях данной цепи методом контурных токов.
3. Определить режимы работы активных элементов и составить баланс мощности.
Номер схемы соответствует последней цифре номера студенческого билета; данные параметров цени - предпоследней цифре.
| Параметр цепи |
Предпоследняя цифра студенческого билета |
| 4 |
| E1, В |
220 |
| E2, В |
110 |
| R1, Ом |
19 |
| R2, Ом |
20 |
| R3, Ом |
12 |
| R4, Ом |
16 |
| R5, Ом |
15 |
|
Электротехника |
|
|
250₽ |
|
|
10712 |
Расчет неразветвленной линейной цепи переменного тока.
Напряжение на зажимах цепи, вариант которой соответствует последней цифре учебного шифра студента и изображенной на рис. 3, изменяется по закону $u=U_m \cdot \sin{\omega t}$. Амплитудное значение напряжения Um, значения активных сопротивлений r1 и r2, индуктивностей катушек L1 и L2, емкостей конденсаторов C1 и C2 приведены в табл. 3.
Частота питающего напряжения f = 50 Гц.
Необходимо:
1. Определить показания приборов, указанных на схеме рис. 3.
2. Построить векторную диаграмму токов и напряжений.
3. Определить закон изменения тока в цепи.
4. Определить закон изменения напряжения между точками, к которым подключен вольтметр.
5. Определить активную, реактивную и полную мощности источника, активную, реактивную и полную мощности приемников. Составить и оценить баланс мощностей. Рассчитать коэффициент мощности.
6. Определить характер (индуктивность, емкость) и параметры элемента, который должен быть включен в электрическую цепь для того, чтобы в ней имел место резонанс напряжений.
| Предпоследняя цифра учебного шифра студента |
Um, В |
r1, Ом |
r2, Ом |
L1, Гн |
L2, Гн |
C1, мкФ |
C2, мкФ |
| 3 |
460 |
4 |
6 |
0,02 |
0,02 |
250 |
800 |
|
Электротехника |
336 |
МИИТ. Общая электротехника и электроника. 2016 год |
250₽ |
|
|
10794 |
Расчет неразветвленной линейной цепи переменного тока.
Напряжение на зажимах цепи, вариант которой соответствует последней цифре учебного шифра студента и изображенной на рис. 3, изменяется по закону $u=U_m \cdot \sin{\omega t}$. Амплитудное значение напряжения Um, значения активных сопротивлений r1 и r2, индуктивностей катушек L1 и L2, емкостей конденсаторов C1 и C2 приведены в табл. 3.
Частота питающего напряжения f = 50 Гц.
Необходимо:
1. Определить показания приборов, указанных на схеме рис. 3.
2. Построить векторную диаграмму токов и напряжений.
3. Определить закон изменения тока в цепи.
4. Определить закон изменения напряжения между точками, к которым подключен вольтметр.
5. Определить активную, реактивную и полную мощности источника, активную, реактивную и полную мощности приемников. Составить и оценить баланс мощностей. Рассчитать коэффициент мощности.
6. Определить характер (индуктивность, емкость) и параметры элемента, который должен быть включен в электрическую цепь для того, чтобы в ней имел место резонанс напряжений.
| Предпоследняя цифра учебного шифра студента |
Um, В |
r1, Ом |
r2, Ом |
L1, Гн |
L2, Гн |
C1, мкФ |
C2, мкФ |
| 3 |
460 |
4 |
6 |
0,02 |
0,02 |
250 |
800 |
|
Электротехника |
330 |
МИИТ. Общая электротехника и электроника. 2016 год |
250₽ |
|
|
12848 |
С наклонной плоскости h, составляющей угол α с горизонтом, соскальзывает с начальной скоростью, равной нулю, шайба массой m1 после схода с наклонной плоскости ударяющаяся абсолютно упруго о неподвижную шайбу массой m2, которая после удара проходит по горизонтальной поверхности путь S. При движении обеих шайб коэффициент трения одинаков и равен К. Определить параметр, обозначенный в таблице данных для Вашего варианта знаком «?».
| Номер варианта |
h, м |
α, град |
m1, кг |
m2, кг |
k |
S, м |
| 4 |
1 |
30 |
1 |
? |
0,1 |
11,8 |
|
Механика |
4-4 |
ЗабГУ. Физика. 2011 год |
250₽ |
|
|
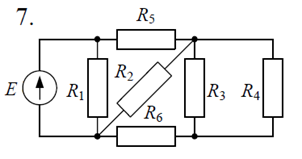
10220 |
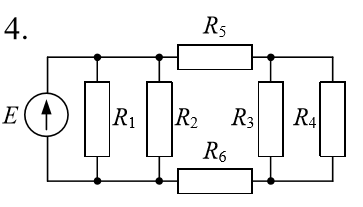
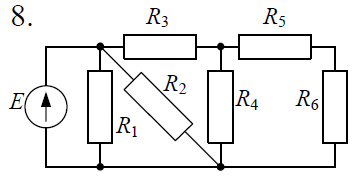
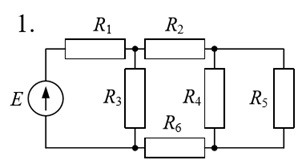
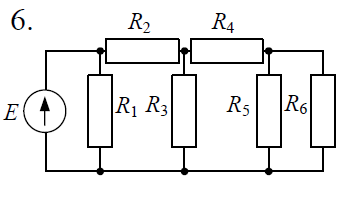
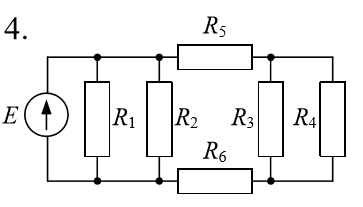
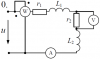
Расчет разветвленной линейной электрической цепи постоянного тока с одним источником электрической энергии
Для электрической цепи, вариант которой соответствует последней цифре учебного шифра студента и изображенной на рис. 1, определить:
1. Токи в ветвях.
2. Мощность, развиваемую источником энергии и мощность потребителей. Проверить выполнение баланса мощностей.
Значения сопротивлений резисторов и ЭДС источника приведены в табл. 1
| Предпоследняя цифра учебного шифра студента |
E, В |
R1, Ом |
R2, Ом |
R3, Ом |
R4, Ом |
R5, Ом |
R6, Ом |
| 9 |
140 |
12 |
11 |
10 |
9 |
16 |
15 |
|
Электротехника |
197 |
МИИТ. Общая электротехника и электроника. 2016 год |
250₽ |
|
|
10156 |
Расчет разветвленной линейной электрической цепи постоянного тока с одним источником электрической энергии
Для электрической цепи, вариант которой соответствует последней цифре учебного шифра студента и изображенной на рис. 1, определить:
1. Токи в ветвях.
2. Мощность, развиваемую источником энергии и мощность потребителей. Проверить выполнение баланса мощностей.
Значения сопротивлений резисторов и ЭДС источника приведены в табл. 1
| Предпоследняя цифра учебного шифра студента |
E, В |
R1, Ом |
R2, Ом |
R3, Ом |
R4, Ом |
R5, Ом |
R6, Ом |
| 8 |
130 |
16 |
9 |
13 |
14 |
11 |
7 |
|
Электротехника |
184 |
МИИТ. Общая электротехника и электроника. 2016 год |
250₽ |
|
|
10236 |
Расчет разветвленной линейной электрической цепи постоянного тока с одним источником электрической энергии
Для электрической цепи, вариант которой соответствует последней цифре учебного шифра студента и изображенной на рис. 1, определить:
1. Токи в ветвях.
2. Мощность, развиваемую источником энергии и мощность потребителей. Проверить выполнение баланса мощностей.
Значения сопротивлений резисторов и ЭДС источника приведены в табл. 1
| Предпоследняя цифра учебного шифра студента |
E, В |
R1, Ом |
R2, Ом |
R3, Ом |
R4, Ом |
R5, Ом |
R6, Ом |
| 7 |
120 |
7 |
6 |
14 |
9 |
15 |
10 |
|
Электротехника |
178 |
МИИТ. Общая электротехника и электроника. 2016 год |
250₽ |
|
|
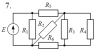
8102 |
ЗАДАНИЕ № 1 «РАСЧЕТ ЦЕПИ ПОСТОЯННОГО ТОКА»
1.1. Для заданной согласно своему варианту электрической схемы составить систему уравнений по законам Кирхгофа, достаточную для определения токов ветвей. Полученную систему уравнений не решать.
1.2. Рассчитать токи во всех ветвях заданной электрической схемы методом контурных токов. Правильность расчетов проверить составлением баланса мощностей.
1.3. Примечания:
1) Первая цифра в трехзначном номере варианта, заданного преподавателем (как правило, три последние цифры в зачетной книжке студента), соответствует порядковому номеру строки в таблице 1.1, вторая цифра – порядковому номеру строки в таблице 1.2, третья цифра – номеру схемы на рис. 1.1.
2) Баланс мощностей должен сойтись с погрешностью менее 1%.
Таблица № 1.1
| № п/п |
E1, В |
E2, B |
| 1 |
12 |
16 |
Таблица № 1.2
| № п/п |
R1, Ом |
R2, Ом |
R3, Ом |
R4, Ом |
R5, Ом |
R6, Ом |
| 7 |
7 |
8 |
6 |
9 |
5 |
10 |
|
Электротехника |
|
|
250₽ |
|
|
10588 |
Расчет неразветвленной линейной цепи переменного тока.
Напряжение на зажимах цепи, вариант которой соответствует последней цифре учебного шифра студента и изображенной на рис. 3, изменяется по закону $u=U_m \cdot \sin{\omega t}$. Амплитудное значение напряжения Um, значения активных сопротивлений r1 и r2, индуктивностей катушек L1 и L2, емкостей конденсаторов C1 и C2 приведены в табл. 3.
Частота питающего напряжения f = 50 Гц.
Необходимо:
1. Определить показания приборов, указанных на схеме рис. 3.
2. Построить векторную диаграмму токов и напряжений.
3. Определить закон изменения тока в цепи.
4. Определить закон изменения напряжения между точками, к которым подключен вольтметр.
5. Определить активную, реактивную и полную мощности источника, активную, реактивную и полную мощности приемников. Составить и оценить баланс мощностей. Рассчитать коэффициент мощности.
6. Определить характер (индуктивность, емкость) и параметры элемента, который должен быть включен в электрическую цепь для того, чтобы в ней имел место резонанс напряжений.
| Предпоследняя цифра учебного шифра студента |
Um, В |
r1, Ом |
r2, Ом |
L1, Гн |
L2, Гн |
C1, мкФ |
C2, мкФ |
| 3 |
460 |
4 |
6 |
0,02 |
0,02 |
250 |
800 |
|
Электротехника |
332 |
МИИТ. Общая электротехника и электроника. 2016 год |
250₽ |
|
|
12954 |
Стержень массой m1 и длиной l1 может свободно вращаться вокруг горизонтальной оси, проходящей через один из его концов. В покоящийся стержень попала пуля массой m2, летевшая горизонтально со скоростью v перпендикулярно оси вращения стержня, от которой точка попадания пули находилась на расстоянии l2. После удара пули, имеющего неупругий характер, стержень отклонился на угол α. Определить параметр, обозначенный в таблице данных для Вашего варианта знаком «?».
| Номер варианта |
m1, кг |
l1, м |
m2, кг |
l2, м |
v, м/с |
α, град |
| 6 |
8 |
1,2 |
0,008 |
0,9 |
700 |
? |
|
Механика |
6-6 |
ЗабГУ. Физика. 2011 год |
250₽ |
|
|
11882 |
Три точечных заряда Q1 = 0,9ּ∙10-6 Кл, Q2 = 0,9∙ּ10-6 Кл, Q3 = 0,9ּ∙10-6 Кл расположены последовательно вдоль одной прямой и связаны двумя нитями длины L = 0,1 м каждая. Найдите натяжение нитей. Заряд Q2 находится посередине. Постройте график модуля вектора напряженности поля E(x).
|
Электростатика |
|
|
250₽ |
|
|
10090 |
Расчет разветвленной линейной электрической цепи постоянного тока с одним источником электрической энергии
Для электрической цепи, вариант которой соответствует последней цифре учебного шифра студента и изображенной на рис. 1, определить:
1. Токи в ветвях.
2. Мощность, развиваемую источником энергии и мощность потребителей. Проверить выполнение баланса мощностей.
Значения сопротивлений резисторов и ЭДС источника приведены в табл. 1
| Предпоследняя цифра учебного шифра студента |
E, В |
R1, Ом |
R2, Ом |
R3, Ом |
R4, Ом |
R5, Ом |
R6, Ом |
| 6 |
110 |
7 |
8 |
12 |
14 |
13 |
8 |
|
Электротехника |
162 |
МИИТ. Общая электротехника и электроника. 2016 год |
250₽ |
|
|
13120 |
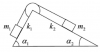
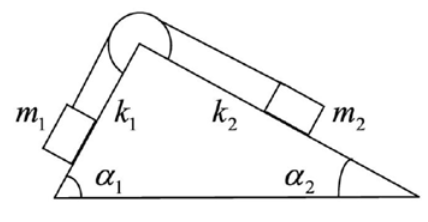
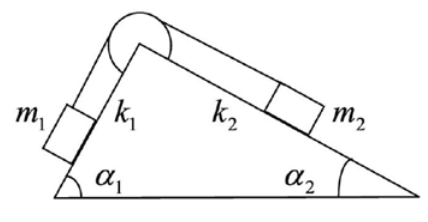
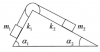
Два тела с массами m1 и m2 связаны невесомой нитью перекинутой через невесомый блок (Рис. 1). Наклонные плоскости, по которым скользят грузы, составляют с горизонтом углы α1 и α2 соответственно, а коэффициенты трения между грузами и плоскостями равны k1 и k2 соответственно. Трением в блоке можно пренебречь. В какую сторону движутся грузы - влево или вправо? Найти ускорение a грузов и силу натяжения T нити. Ускорение свободного падения g = 9,81 м/с2.
| № варианта |
m1, m2, α1, α2, k1, k2 |
| 1 |
m1 = 1 кг, m2 = 3 кг, α1 = 45°, α2 = 30°, k1 = 0,1, k2 = 0,2 |
|
ФИЗИКА |
2-1-1 |
ТГУ. Практические занятия по физике. 2019 год |
250₽ |
|
|
10172 |
Расчет разветвленной линейной электрической цепи постоянного тока с одним источником электрической энергии
Для электрической цепи, вариант которой соответствует последней цифре учебного шифра студента и изображенной на рис. 1, определить:
1. Токи в ветвях.
2. Мощность, развиваемую источником энергии и мощность потребителей. Проверить выполнение баланса мощностей.
Значения сопротивлений резисторов и ЭДС источника приведены в табл. 1
| Предпоследняя цифра учебного шифра студента |
E, В |
R1, Ом |
R2, Ом |
R3, Ом |
R4, Ом |
R5, Ом |
R6, Ом |
| 6 |
110 |
7 |
8 |
12 |
14 |
13 |
8 |
|
Электротехника |
165 |
МИИТ. Общая электротехника и электроника. 2016 год |
250₽ |
|
|
13202 |

На однородный цилиндрический блок массой m2 и радиусом R намотана невесомая нить, к свободному концу которой прикреплен груз массой m1. К блоку крестообразно прикреплены четыре одинаковых невесомых стержня, на которых закреплены одинаковые грузы массой m3 на расстоянии x от оси вращения (Рис. 2). Грузы m3 можно считать материальными точками. Трением в блоке можно пренебречь. Найти зависимость ускорения a груза m1 от расстояния x. Построить график этой зависимости в интервале изменения x от R до 3R. Ускорение свободного падения g = 9,81 м/с2.
| № варианта |
R, m1, m2, m3 |
| 2 |
R = 0,2 м, m1 = 1 кг, m2 = 2 кг, m3 = 3 кг |
|
ФИЗИКА |
2-3-2 |
ТГУ. Практические занятия по физике. 2019 год |
250₽ |
|
|
10252 |
Расчет разветвленной линейной электрической цепи постоянного тока с одним источником электрической энергии
Для электрической цепи, вариант которой соответствует последней цифре учебного шифра студента и изображенной на рис. 1, определить:
1. Токи в ветвях.
2. Мощность, развиваемую источником энергии и мощность потребителей. Проверить выполнение баланса мощностей.
Значения сопротивлений резисторов и ЭДС источника приведены в табл. 1
| Предпоследняя цифра учебного шифра студента |
E, В |
R1, Ом |
R2, Ом |
R3, Ом |
R4, Ом |
R5, Ом |
R6, Ом |
| 5 |
100 |
12 |
18 |
6 |
8 |
14 |
10 |
|
Электротехника |
159 |
МИИТ. Общая электротехника и электроника. 2016 год |
250₽ |
|
|
12888 |
С наклонной плоскости h, составляющей угол α с горизонтом, соскальзывает с начальной скоростью, равной нулю, шайба массой m1 после схода с наклонной плоскости ударяющаяся абсолютно упруго о неподвижную шайбу массой m2, которая после удара проходит по горизонтальной поверхности путь S. При движении обеих шайб коэффициент трения одинаков и равен К. Определить параметр, обозначенный в таблице данных для Вашего варианта знаком «?».
| Номер варианта |
h, м |
α, град |
m1, кг |
m2, кг |
k |
S, м |
| 23 |
? |
60 |
0,8 |
0,3 |
0,2 |
50 |
|
Механика |
4-23 |
ЗабГУ. Физика. 2011 год |
250₽ |
|
|
12970 |
Стержень массой m1 и длиной l1 может свободно вращаться вокруг горизонтальной оси, проходящей через один из его концов. В покоящийся стержень попала пуля массой m2, летевшая горизонтально со скоростью v перпендикулярно оси вращения стержня, от которой точка попадания пули находилась на расстоянии l2. После удара пули, имеющего неупругий характер, стержень отклонился на угол α. Определить параметр, обозначенный в таблице данных для Вашего варианта знаком «?».
| Номер варианта |
m1, кг |
l1, м |
m2, кг |
l2, м |
v, м/с |
α, град |
| 14 |
6 |
? |
0,007 |
1,0 |
800 |
31,3 |
|
Механика |
6-14 |
ЗабГУ. Физика. 2011 год |
250₽ |
|
|
10108 |
Расчет разветвленной линейной электрической цепи постоянного тока с одним источником электрической энергии
Для электрической цепи, вариант которой соответствует последней цифре учебного шифра студента и изображенной на рис. 1, определить:
1. Токи в ветвях.
2. Мощность, развиваемую источником энергии и мощность потребителей. Проверить выполнение баланса мощностей.
Значения сопротивлений резисторов и ЭДС источника приведены в табл. 1
| Предпоследняя цифра учебного шифра студента |
E, В |
R1, Ом |
R2, Ом |
R3, Ом |
R4, Ом |
R5, Ом |
R6, Ом |
| 4 |
90 |
13 |
14 |
16 |
8 |
10 |
15 |
|
Электротехника |
141 |
МИИТ. Общая электротехника и электроника. 2016 год |
250₽ |
|
|
13136 |

Два тела с массами m1 и m2 связаны невесомой нитью перекинутой через невесомый блок (Рис. 1). Наклонные плоскости, по которым скользят грузы, составляют с горизонтом углы α1 и α2 соответственно, а коэффициенты трения между грузами и плоскостями равны k1 и k2 соответственно. Трением в блоке можно пренебречь. В какую сторону движутся грузы - влево или вправо? Найти ускорение a грузов и силу натяжения T нити. Ускорение свободного падения g = 9,81 м/с2.
| № варианта |
m1, m2, α1, α2, k1, k2 |
| 9 |
m1 = 3 кг, m2 = 3 кг, α1 = 55°, α2 = 35°, k1 = 0,2, k2 = 0,1 |
|
ФИЗИКА |
2-1-9 |
ТГУ. Практические занятия по физике. 2019 год |
250₽ |
|
|
10188 |
Расчет разветвленной линейной электрической цепи постоянного тока с одним источником электрической энергии
Для электрической цепи, вариант которой соответствует последней цифре учебного шифра студента и изображенной на рис. 1, определить:
1. Токи в ветвях.
2. Мощность, развиваемую источником энергии и мощность потребителей. Проверить выполнение баланса мощностей.
Значения сопротивлений резисторов и ЭДС источника приведены в табл. 1
| Предпоследняя цифра учебного шифра студента |
E, В |
R1, Ом |
R2, Ом |
R3, Ом |
R4, Ом |
R5, Ом |
R6, Ом |
| 4 |
90 |
13 |
14 |
16 |
8 |
10 |
15 |
|
Электротехника |
146 |
МИИТ. Общая электротехника и электроника. 2016 год |
250₽ |
|
|
10268 |
Расчет разветвленной линейной электрической цепи постоянного тока с одним источником электрической энергии
Для электрической цепи, вариант которой соответствует последней цифре учебного шифра студента и изображенной на рис. 1, определить:
1. Токи в ветвях.
2. Мощность, развиваемую источником энергии и мощность потребителей. Проверить выполнение баланса мощностей.
Значения сопротивлений резисторов и ЭДС источника приведены в табл. 1
| Предпоследняя цифра учебного шифра студента |
E, В |
R1, Ом |
R2, Ом |
R3, Ом |
R4, Ом |
R5, Ом |
R6, Ом |
| 2 |
70 |
13 |
10 |
10 |
11 |
15 |
17 |
|
Электротехника |
120 |
МИИТ. Общая электротехника и электроника. 2016 год |
250₽ |
|
|
12986 |
Стержень массой m1 и длиной l1 может свободно вращаться вокруг горизонтальной оси, проходящей через один из его концов. В покоящийся стержень попала пуля массой m2, летевшая горизонтально со скоростью v перпендикулярно оси вращения стержня, от которой точка попадания пули находилась на расстоянии l2. После удара пули, имеющего неупругий характер, стержень отклонился на угол α. Определить параметр, обозначенный в таблице данных для Вашего варианта знаком «?».
| Номер варианта |
m1, кг |
l1, м |
m2, кг |
l2, м |
v, м/с |
α, град |
| 22 |
4 |
? |
0,008 |
1,4 |
800 |
13 |
|
Механика |
6-22 |
ЗабГУ. Физика. 2011 год |
250₽ |
|
|
10124 |

Расчет разветвленной линейной электрической цепи постоянного тока с одним источником электрической энергии
Для электрической цепи, вариант которой соответствует последней цифре учебного шифра студента и изображенной на рис. 1, определить:
1. Токи в ветвях.
2. Мощность, развиваемую источником энергии и мощность потребителей. Проверить выполнение баланса мощностей.
Значения сопротивлений резисторов и ЭДС источника приведены в табл. 1
| Предпоследняя цифра учебного шифра студента |
E, В |
R1, Ом |
R2, Ом |
R3, Ом |
R4, Ом |
R5, Ом |
R6, Ом |
| 2 |
70 |
13 |
10 |
10 |
11 |
15 |
17 |
|
Электротехника |
123 |
МИИТ. Общая электротехника и электроника. 2016 год |
250₽ |
|
|
13154 |
Два тела с массами m1 и m2 связаны невесомой нитью перекинутой через невесомый блок (Рис. 1). Наклонные плоскости, по которым скользят грузы, составляют с горизонтом углы α1 и α2 соответственно, а коэффициенты трения между грузами и плоскостями равны k1 и k2 соответственно. Трением в блоке можно пренебречь. В какую сторону движутся грузы - влево или вправо? Найти ускорение a грузов и силу натяжения T нити. Ускорение свободного падения g = 9,81 м/с2.
| № варианта |
m1, m2, α1, α2, k1, k2 |
| 18 |
m1 = 1 кг, m2 = 4 кг, α1 = 75°, α2 = 30°, k1 = 0,1, k2 = 0,1 |
|
ФИЗИКА |
2-1-18 |
ТГУ. Практические занятия по физике. 2019 год |
250₽ |
|
|
10204 |

Расчет разветвленной линейной электрической цепи постоянного тока с одним источником электрической энергии
Для электрической цепи, вариант которой соответствует последней цифре учебного шифра студента и изображенной на рис. 1, определить:
1. Токи в ветвях.
2. Мощность, развиваемую источником энергии и мощность потребителей. Проверить выполнение баланса мощностей.
Значения сопротивлений резисторов и ЭДС источника приведены в табл. 1
| Предпоследняя цифра учебного шифра студента |
E, В |
R1, Ом |
R2, Ом |
R3, Ом |
R4, Ом |
R5, Ом |
R6, Ом |
| 1 |
60 |
9 |
8 |
7 |
15 |
14 |
13 |
|
Электротехника |
117 |
МИИТ. Общая электротехника и электроника. 2016 год |
250₽ |
|
|
10556 |
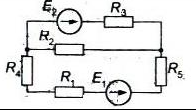
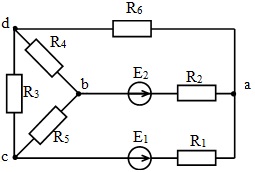
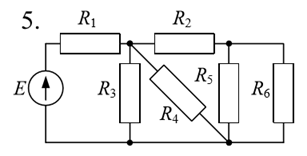
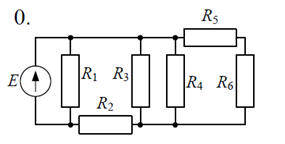
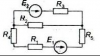
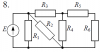
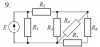
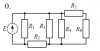
Расчет разветвленной линейной электрической цепи постоянного тока с несколькими источниками электрической энергии.
Для электрической цепи, вариант которой соответствует последней цифре учебного шифра студента и изображенной на рис. 2, выполнить следующее:
1. Составить уравнения для определения токов путем непосредственного применения законов Кирхгофа (указав, для каких узлов и контуров эти уравнения записаны). Решать эту систему уравнений не следует.
2. Определить токи в ветвях методом контурных токов.
3. Определить режимы работы активных элементов и составить баланс мощностей.
Значения ЭДС источников и сопротивлений приемников приведены в табл. 2.
| Предпоследняя цифра учебного шифра студента |
E1, В |
E2, В |
R1, Ом |
R2, Ом |
R3, Ом |
R4, Ом |
R5, Ом |
R6, Ом |
| 0 |
150 |
110 |
20 |
9 |
17 |
13 |
21 |
16 |
|
Электротехника |
200 |
МИИТ. Общая электротехника и электроника. 2016 год |
250₽ |
|
|
9564 |

ЗАДАНИЕ № 1 «РАСЧЕТ ЦЕПИ ПОСТОЯННОГО ТОКА»
1.1. Для заданной согласно своему варианту электрической схемы составить систему уравнений по законам Кирхгофа, достаточную для определения токов ветвей. Полученную систему уравнений не решать.
1.2. Рассчитать токи во всех ветвях заданной электрической схемы методом контурных токов. Правильность расчетов проверить составлением баланса мощностей.
1.3. Примечания:
1) Первая цифра в трехзначном номере варианта, заданного преподавателем (как правило, три последние цифры в зачетной книжке студента), соответствует порядковому номеру строки в таблице 1.1, вторая цифра – порядковому номеру строки в таблице 1.2, третья цифра – номеру схемы на рис. 1.1.
2) Баланс мощностей должен сойтись с погрешностью менее 1%.
Таблица № 1.1
| № п/п |
E1, В |
E2, B |
| 2 |
18 |
20 |
Таблица № 1.2
| № п/п |
R1, Ом |
R2, Ом |
R3, Ом |
R4, Ом |
R5, Ом |
R6, Ом |
| 4 |
7 |
9 |
6 |
10 |
8 |
6 |
|
Электротехника |
240 |
|
250₽ |
|
|
10140 |
Расчет разветвленной линейной электрической цепи постоянного тока с одним источником электрической энергии
Для электрической цепи, вариант которой соответствует последней цифре учебного шифра студента и изображенной на рис. 1, определить:
1. Токи в ветвях.
2. Мощность, развиваемую источником энергии и мощность потребителей. Проверить выполнение баланса мощностей.
Значения сопротивлений резисторов и ЭДС источника приведены в табл. 1
| Предпоследняя цифра учебного шифра студента |
E, В |
R1, Ом |
R2, Ом |
R3, Ом |
R4, Ом |
R5, Ом |
R6, Ом |
| 0 |
150 |
17 |
6 |
9 |
18 |
7 |
16 |
|
Электротехника |
104 |
МИИТ. Общая электротехника и электроника. 2016 год |
250₽ |
|
|
10722 |
Расчет неразветвленной линейной цепи переменного тока.
Напряжение на зажимах цепи, вариант которой соответствует последней цифре учебного шифра студента и изображенной на рис. 3, изменяется по закону $u=U_m \cdot \sin{\omega t}$. Амплитудное значение напряжения Um, значения активных сопротивлений r1 и r2, индуктивностей катушек L1 и L2, емкостей конденсаторов C1 и C2 приведены в табл. 3.
Частота питающего напряжения f = 50 Гц.
Необходимо:
1. Определить показания приборов, указанных на схеме рис. 3.
2. Построить векторную диаграмму токов и напряжений.
3. Определить закон изменения тока в цепи.
4. Определить закон изменения напряжения между точками, к которым подключен вольтметр.
5. Определить активную, реактивную и полную мощности источника, активную, реактивную и полную мощности приемников. Составить и оценить баланс мощностей. Рассчитать коэффициент мощности.
6. Определить характер (индуктивность, емкость) и параметры элемента, который должен быть включен в электрическую цепь для того, чтобы в ней имел место резонанс напряжений.
| Предпоследняя цифра учебного шифра студента |
Um, В |
r1, Ом |
r2, Ом |
L1, Гн |
L2, Гн |
C1, мкФ |
C2, мкФ |
| 8 |
240 |
10 |
12 |
0,01 |
0,05 |
250 |
800 |
|
Электротехника |
386 |
МИИТ. Общая электротехника и электроника. 2016 год |
250₽ |
|