|
8598 |
ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Тело начинает вращаться равноускоренно из состояния покоя. В тот момент, когда его угловая скорость численно равна углу поворота, оно делает 120 об/мин. Чему равно угловое ускорение тела и сколько оборотов оно сделало за первые 15 с? Найти линейную скорость точки тела, а также ее нормальное, касательное и полное ускорения в указанный момент времени при условии, что точка находится от оси вращения на расстоянии 0.4 м.
|
Теоретическая механика |
K4.20 |
Теоретическая механика 2 |
300₽ |
|
|
8688 |

ПРИНЦИП ДАЛАМБЕРА
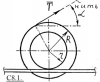
Однородная проволочная полуокружность массой m радиусом R вращается с постоянной угловой скоростью ω вокруг оси ОА (оси Оу). Определить реакции в точках крепления В и D кольца к стержню OA. Расстояние от центра тяжести полукольца до оси ОA: $$x_C=\frac{2R}{3\pi}$$.
|
Теоретическая механика |
Д6.3 |
Теоретическая механика 2 |
300₽ |
|
|
5049 |
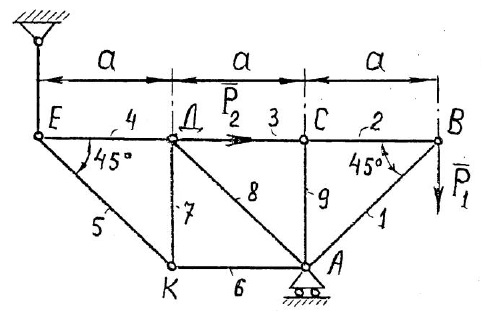
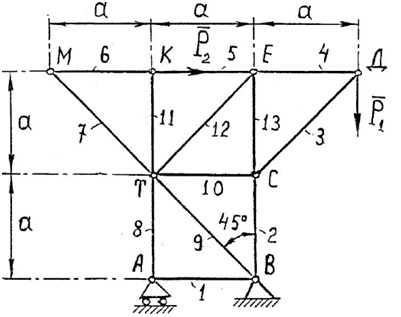
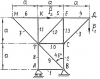
 ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. С3.08 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| С3.8 |
3, 8, 6 |
1, 2 |
140 |
90 |
|
Теоретическая механика |
C3.8_1 |
Теоретическая механика |
300₽ |
|
|
14580 |

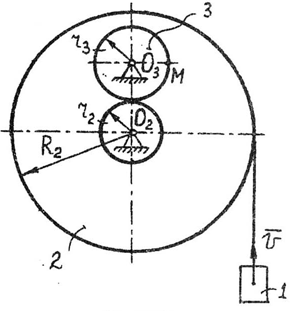
ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
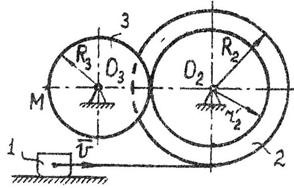
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.11 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.11 |
Теоретическая механика 2 |
300₽ |
|
|
10906 |
ОПРЕДЕЛЕНИЕ РЕАКЦИИ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Схемы конструкций построены на рис. СЗ. 1 - С3.20.
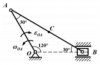
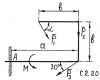
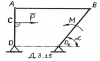
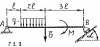
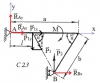
Однородная балка AB длиной l и весом P нагружена парой сил с моментом M и удерживается под углом 30° к горизонту невесомыми стержнями AC и AD и наклонной плоскостью EK. Определить давление балки на опорную плоскость и усилия в стержнях.
P = 25 кН; М =12 кН∙м; l = 5 м; α = 45°.
|
Теоретическая механика |
C3.16. |
Теоретическая механика 2 |
300₽ |
|
|
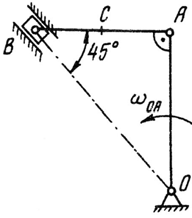
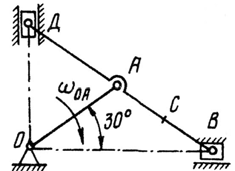
16842 |
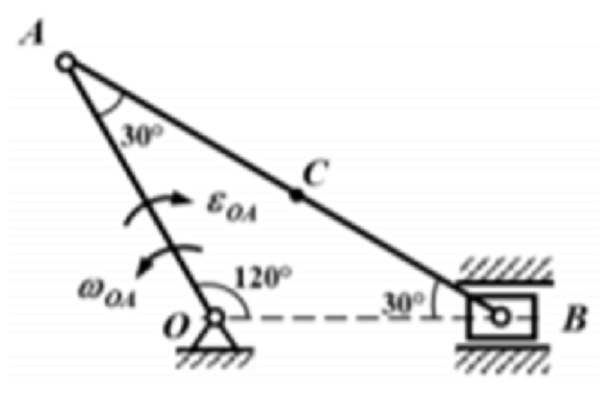
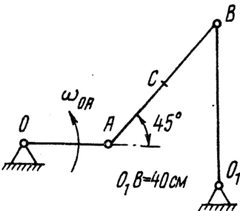
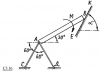
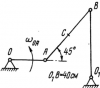
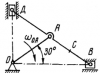
Для заданного положения звеньев механизма определить скорости и ускорения точек В и С.
εOA = 2 рад/с2, ωОA = 3 рад/с, OA = 20 см, AC = CB.
|
Теоретическая механика |
|
|
300₽ |
|
|
8614 |

ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
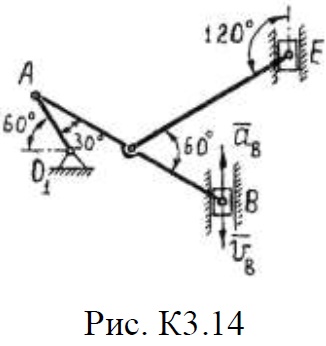
На рис. К3.14 показана схема механизма, причем
О1А = L1 = 0,4 м;
АВ = L2 = 1,4 м;
ДE = L3 = 1,2 м;
O2В = L4 = 0,6 м;
АД = ДВ.
Ползун в данном положении механизма имеет скорость VB = 4 м/с и ускорение aB = 6 м/с2. Для заданного положения механизма построить мгновенные центры скоростей шатунов АВ и ДЕ, найти скорости точек А, Д, Е, угловые скорости указанных шатунов и кривошипа О1А, а также ускорение точки А.
|
Теоретическая механика |
K5.14 |
Теоретическая механика 2 |
300₽ |
|
|
10842 |
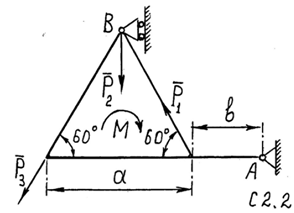
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.17, -исходные данные приведены в таблице 2.
| Номер варианта |
Р1, кН |
P2, кН |
P3 кН |
M кН∙м |
a, м |
b, м |
α, град |
| С-2.2. |
7 |
6 |
6 |
4 |
1.0 |
0.5 |
0° |
|
Теоретическая механика |
C2.2. |
Теоретическая механика 2 |
300₽ |
|
|
5064 |
ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Диск турбины, вышедшей из состояния покоя, вращается вокруг неподвижной оси по закону φ = Аt3 + Вt2, где φ задан в радианах, а время t - в секундах; А и В - постоянные коэффициенты. В момент времени t3 = 2 с и t2 = 3 с угловая скорость диска достигает значений ω1 = 2 с-1 и ω2 = 3 с-1. Определить угловое ускорение точки диска, отстоящей от оси вращения на 30 см, в момент времени t3 = 4 с.
|
Теоретическая механика |
K4.6 |
Теоретическая механика 2 |
300₽ |
|
|
14596 |

ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.19 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.19 |
Теоретическая механика 2 |
300₽ |
|
|
10922 |
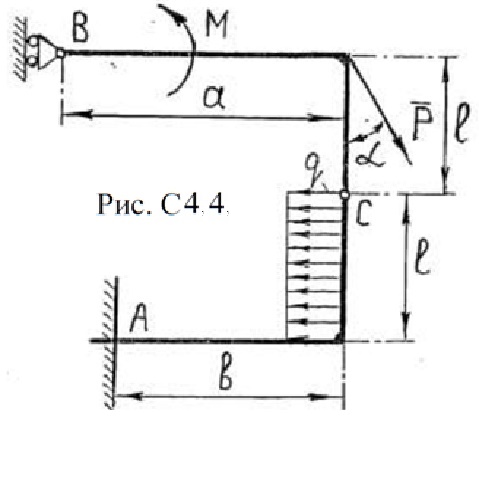
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. C4.4, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| C4.4 |
7 |
5.2 |
4 |
3.2 |
2.7 |
1.6 |
60° |
|
Теоретическая механика |
C4.4 |
Теоретическая механика 2 |
300₽ |
|
|
16573 |
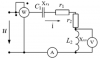
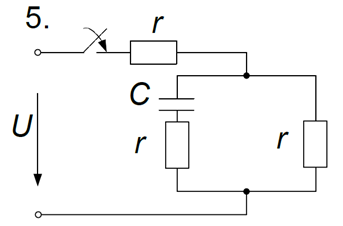
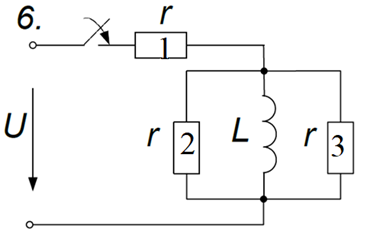
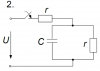
САМОСТОЯТЕЛЬНАЯ РАБОТА 3
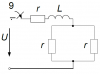
Расчёт неразветвлённой электрической цепи постоянного тока
Необходимо:
1. Определить показания приборов, указанных на схеме
2. Определить закон изменения тока Б цепи.
3. Определить закон изменения напряжения между точками, к которым подключен вольтметр.
4. Построить векторную диаграмм токов и напряжений
5. Определять активную и реактивную мощности источника, активную и реактивную мощности приемников. Составить и оценить баланс активной н реактивной мощностей.
6. Определить характер (индуктивность, емкость) и параметры элемента, который должен быть включен в цепь для того, чтобы в ней имел место резонанс напряжений.
Примечание. Ваттметр измеряет активную мощность цепи.
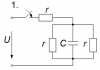
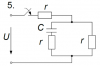
Напряжение на зажимах цепи, вариант которой соответствует последней цифре учебного шифра студента и изображенной на рис, изменяется по закону $u=U_m\cdot \sin{\omega t}$. Амплитудное значение напряжения Um, значения активных сопротивлений r1 и r2, индуктивностей катушек L1 и L2, емкостей конденсаторов C1 и C2 приведены в таблице. Частота питающего напряжения f = 50 Гц.
| Параметр цепи |
Предпоследняя цифра учебного шифра студента |
| 8 |
| Ψ, град |
-15 |
| Um, В |
240 |
| r1, Ом |
10 |
| r2, Ом |
12 |
| L1, Гн |
0,01 |
| L2, Гн |
0,05 |
| C1, мкФ |
250 |
| C2, мкФ |
800 |
|
Электротехника |
|
|
300₽ |
|
|
8930 |

ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис.
OA = 40 см = 0,40 м; AB = 40 см = 0,40 м; AC = 20 см = 0,20 м; ωOA = 4 c-1.
|
Теоретическая механика |
K6.17 |
Теоретическая механика 2 |
300₽ |
|
|
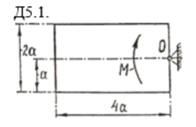
14034 |
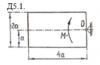
Однородная прямоугольная пластина массой m со сторонами 2a и 4a вращается вокруг вертикальной неподвижной оси O, перпендикулярной к ее плоскости. На пластину действует пара сил с моментом M = 2t, лежащая в ее плоскости. Определить закон изменения угловой скорости пластины, если в начальный момент она была неподвижна
|
Теоретическая механика |
Д5.1 |
Теоретическая механика 2 |
300₽ |
|
|
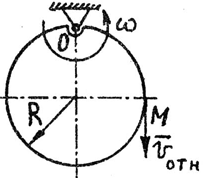
8630 |
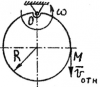
Точка М движется по ободу диска радиуса R = 0,2 м согласно уравнению ОМ = 3t2 + 2t м. Определить абсолютную скорость точки М в указанном положении, если закон вращения диска φ = 2t рад.
|
Теоретическая механика |
K7.12 |
Теоретическая механика 2 |
300₽ |
|
|
13324 |
Шар массой m1, летящий со скоростью v1, сталкивается с неподвижным шаром массой m2. После удара шары разлетаются под углом α друг к другу. Удар абсолютно упругий, столкновение происходит в горизонтальной плоскости. Найти скорости шаров u1 и u2 после удара.
| № варианта |
m1, v1, m2, α |
| 2 |
m1 = 120 г, v1 = 10 м/с, m2 = 180 г, α = 135° |
|
ФИЗИКА |
3-3-2 |
ТГУ. Практические занятия по физике. 2019 год |
300₽ |
|
|
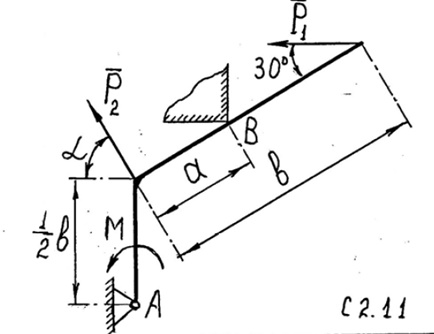
10858 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.11, -исходные данные приведены в таблице 2.
| Номер варианта |
Р1, кН |
P2, кН |
P3, кН |
M кН∙м |
a, м |
b, м |
α, град |
| С-2.11. |
4 |
7 |
0 |
5 |
0.5 |
1.2 |
60° |
|
Теоретическая механика |
C2.11. |
Теоретическая механика 2 |
300₽ |
|
|
5089 |
 ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. С3.9 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| С3.9 |
8, 9, 2 |
3, 4 |
170 |
120 |
|
Теоретическая механика |
C3.9_1 |
Теоретическая механика |
300₽ |
|
|
14614 |
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис.
OA = 25 см = 0,25 м; AB = 45 см = 0,45 м; AC = 22,5 см = 0,225 м; ωOA = 3 c-1; OB1 = 40 см.
|
Теоретическая механика |
K6.20 |
Теоретическая механика 2 |
300₽ |
|
|
11244 |
КИНЕМАТИКА ТОЧКИ
Точка М движется по окружности радиуса R согласно уравнению S = S(t). Определить и построить для момента времени t1 скорость, касательное, нормальное и полное ускорение этой точки. Исходные данные для расчета приведены в табл. 2.
| № варианта |
S = S(t), cм |
R, см |
Время t1, с |
| К2.3 |
4t3 |
24 |
3 |
|
Теоретическая механика |
K2.3 |
Теоретическая механика 2 |
300₽ |
|
|
16581 |

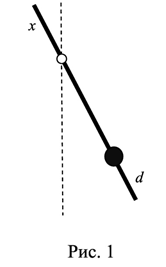
Физический маятник представляет собой тонкий однородный стержень длиной l = 1 м и массой m, на котором жестко закреплена материальная точка массой M на расстоянии d (d < l/2) от нижнего конца стержня. Точка подвеса маятника находится на расстоянии x (x < l/2) от верхнего конца стержня (рис. 1). Найти зависимость периода малых колебаний T маятника от расстояния x и построить график этой зависимости T(x) в интервале изменения x от 0 до l/2. Определить по графику минимальное значение периода T колебаний маятника. Ускорение свободного падения g = 9,81 м/c2.
| № варианта |
d, M/m |
| 7 |
d = 0,15 м, M/m = 0,5 |
|
Механика |
|
|
300₽ |
|
|
14696 |
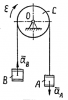
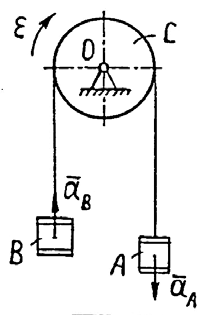
Грузы A и B массой m1, и m2 (m1 > m2) подвешены к концам нити, переброшенной через невесомый блок C. Определить давление блока на ось при движении грузов с ускорением аА = аB = 0,3g.
|
Теоретическая механика |
Д4.9 |
Теоретическая механика 2 |
300₽ |
|
|
13340 |
Шар массой m1, летящий со скоростью v1, сталкивается с неподвижным шаром массой m2. После удара шары разлетаются под углом α друг к другу. Удар абсолютно упругий, столкновение происходит в горизонтальной плоскости. Найти скорости шаров u1 и u2 после удара.
| № варианта |
m1, v1, m2, α |
| 10 |
m1 = 100 г, v1 = 15 м/с, m2 = 300 г, α = 120° |
|
ФИЗИКА |
3-3-10 |
ТГУ. Практические занятия по физике. 2019 год |
300₽ |
|
|
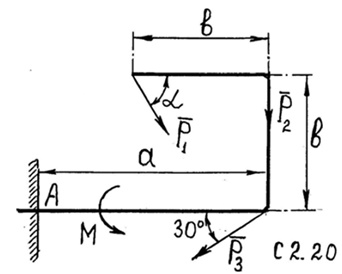
10874 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.20, -исходные данные приведены в таблице 2.
| Номер варианта |
Р1, кН |
P2, кН |
P3, кН |
M кН∙м |
a, м |
b, м |
α, град |
| С-2.20. |
6 |
6 |
9 |
4 |
1.3 |
0.8 |
60° |
|
Теоретическая механика |
C2.20. |
Теоретическая механика 2 |
300₽ |
|
|
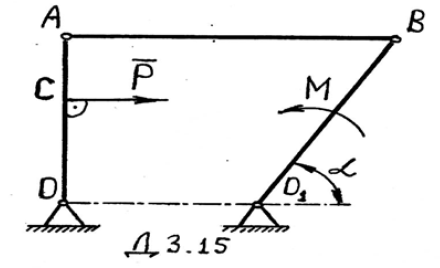
5098 |
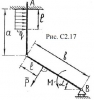
ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ. ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
Зная значение момента пары М, определить значение силы Р; ОС = b, ОА = l1, О1В = l2.
|
Теоретическая механика |
D3.15 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
11276 |
КИНЕМАТИКА ТОЧКИ
Точка М движется по окружности радиуса R согласно уравнению S = S(t). Определить и построить для момента времени t1 скорость, касательное, нормальное и полное ускорение этой точки. Исходные данные для расчета приведены в табл. 2.
| № варианта |
S = S(t), cм |
R, см |
Время t1, с |
| К2.18 |
4t - 6t2 |
2t |
0,5 |
|
Теоретическая механика |
K2.18 |
Теоретическая механика 2 |
300₽ |
|
|
13812 |

ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис.
OA = 40 см = 0,40 м; AB = 30 см = 0,30 м; AC = 15 см = 0,15 м; ωOA = 2 c-1.
|
Теоретическая механика |
K 6-1 |
Теоретическая механика |
300₽ |
|
|
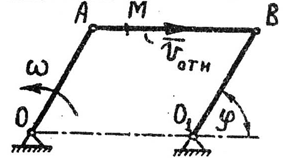
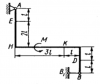
8402 |
По стержню шарнирного параллелограмма ОАВО1, движется точка с постоянной скоростью Vотн = 31 м/с. Определить абсолютную скорость точки М в момент времени, когда угол φ = 60°. Угловая скорость стержня ОА длиной 0,2 м равна ω = 4 с-1.
|
Теоретическая механика |
K7.2 |
Теоретическая механика 2 |
300₽ |
|
|
12298 |
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 7 |
30 |
- |
125 |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
171 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
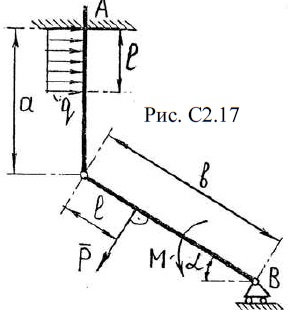
8500 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. С2.17, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С2.17 |
4 |
3.6 |
4 |
1.0 |
2.2 |
1.2 |
60° |
|
Теоретическая механика |
C2.17_1 |
Теоретическая механика |
300₽ |
|
|
16984 |
В треугольнике ABC точка IC – центр вневписанной окружности, касающейся отрезка AB. На сторонах AC и BC нашлись точки X и Y, делящие периметр треугольника ABC на две ломаные равной длины. Докажите, что описанная окружность треугольника CXY делит пополам отрезок CIC.
|
Геометрия |
|
|
300₽ |
|
|
10960 |
СОСТАВЛЕНИЕ РАСЧЕТНОЙ СХЕМЫ ПЛОСКОЙ КОНСТРУКЦИИ
Используя принцип освобождаемости от связей, освободить плоскую конструкцию от связей и приложить к ней реакции связей. Равномерно-распределенную нагрузку заменить соответствующей равнодействующей силой. Силы, не параллельные осям координат, разложить на составляющие, параллельные осям координат. Построить расчетную схему конструкции. Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. C1.3, исходные данные приведены в табл. 1.
| Номер варианта |
Р, кН |
G, кН |
M, кН∙м |
q, кН∙м |
l, м |
α, град |
| C1.3 |
- |
10 |
4 |
3 |
1 |
45° |
|
Теоретическая механика |
C1.3 |
Теоретическая механика 2 |
300₽ |
|
|
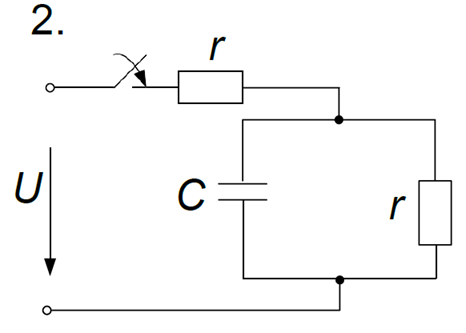
12380 |
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 8 |
20 |
- |
35 |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
185 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
8968 |
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис.
OA = 30 см = 0,30 м; AB = 30 см = 0,30 м; AC = 15 см = 0,15 м; ωOA = 4 c-1.
|
Теоретическая механика |
K6.18 |
Теоретическая механика 2 |
300₽ |
|
|
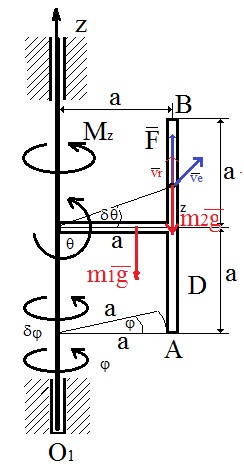
6359 |

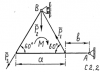
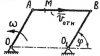
ПРИМЕНЕНИЕ УРАВНЕНИЙ ЛАГРАНЖА ВТОРОГО РОДА К ИЗУЧЕНИЮ ДВИЖЕНИЯ МЕХАНИЧЕСКОЙ СИСТЕМЫ С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ. Тело D массой m1 =120 кг вращается вокруг вертикальной оси O1z под действием пары сил с моментом Mz = 75∙t3. Варианты расчетных схем изображены на рисунке. При этом по желобу АВ тела D под действием внутренней силы $F=\sqrt{t+\sin t}$, направленной по касательной к желобу (управляющее воздействие), движется материальная точка М массой m2 = 20 кг. Согласно закону равенства действия и противодействия с такой же по величине силой, но направленной в противоположную сторону, точка М действует на тело D. Варианты числовых значений параметров приведены в таблице.
Используя уравнения Лагранжа второго рода составить дифференциальные уравнения движения механической системы в обобщенных координатах. Сопротивлением движению пренебречь.
Тело D рассматривать как тонкую однородную пластину. Форма пластины выбирается в соответствии с вариантом задачи. Осевой момент инерции тела определять по формуле, приведенной в таблице.
| Номер варианта |
m1, кг |
m2, кг |
a, м |
Mz = Mz(t), Н∙м |
F = F(t), Н |
| 29 |
120 |
20 |
5 |
75t3 |
$\sqrt{t+\sin t}$ |
|
Теоретическая механика |
D2.18 |
Теоретическая механика |
300₽ |
|
|
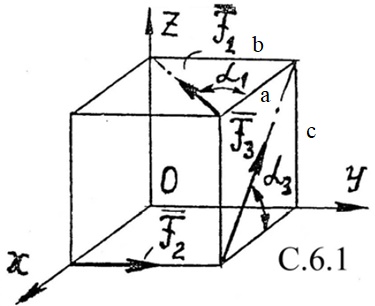
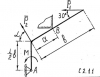
11040 |
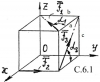
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C6.1 |
Теоретическая механика 2 |
300₽ |
|
|
12460 |
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 3 |
20 |
250 |
- |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
139 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
14802 |

Груз D массой m, получив в точке A начальную скорость v0, движется в изогнутой трубе АВС, расположенной в вертикальной плоскости; участки трубы или оба наклонные, или один горизонтальный, а другой наклонный (рис.3.1, табл. 3.2).
На участке АВ на груз кроме силы тяжести действуют постоянная сила Q (ее направление показано на рисунках).
В точке B груз, не изменяя своей скорости, переходит на участок BC трубы, где на него кроме силы тяжести действует переменная сила F, проекция которой Fx на ось х задана в таблице.
Считая груз материальной точкой и зная время t1 движения груза от точки A до точки B, найти скорость груза на участке BC через t2 = 2 сек. после выхода из точки B. Трением груза о трубу пренебречь.
| Вариант |
m, кг |
v0, м/c |
Q, Н |
t1, с |
Fx, Н |
| 3 |
1,8 |
24 |
5 |
2 |
2t2 + 1 |
|
Теоретическая механика |
Д1-3 |
Методичка по термеху. Нижний Новгород. 2019 год |
300₽ |
|
|
11120 |
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
Расчетные схемы даны на рис. С8.1. Найти наибольшую величину силы Tmax, при приложении которой к катушке весом P при помощи нити начнется ее качение по горизонтальной плоскости. Радиусы катушки равны r и R, а ее коэффициент трения качения равен δ.
|
Теоретическая механика |
C8.1 |
Теоретическая механика 2 |
300₽ |
|
|
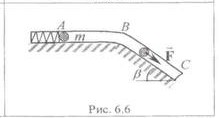
18274 |

Шарик массы m движется из положения A внутри изогнутой трубки, расположенной в вертикальной плоскости. Шарик, пройдя путь l0, отделяется oт пружины. В точке B шарик, не меняя значения своей скорости, переходит на участок BC, где на него дополнительно действует переменная сила F, направление которой указано на рисунке. Пользуясь общими теоремами динамики точки, определить скорость шарика в положениях B и C. В задании принята следующие обозначения: vA - начальная скорость шарика, AB - длина участка, τ - время движения на участке BC, f - коэффициент трения скольжения шарика по стенке трубки, c - коэффициент жесткости пружины.
| № |
Рис. |
m |
vA |
f |
AB |
l0 |
c |
α |
β |
τ |
F(t) |
| 14 |
|
кг |
м/с |
|
м |
см |
Н/см |
град |
с |
Н |
| 6.6 |
0,5 |
4 |
0,3 |
0,4 |
15 |
0,9 |
- |
45 |
0,9 |
1,2sin 0,6t |
|
Механика |
|
|
300₽ |
|
|
11200 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.1 |
5t |
2-5t2 |
1 |
|
Теоретическая механика |
K1.1 |
Теоретическая механика 2 |
300₽ |
|
|
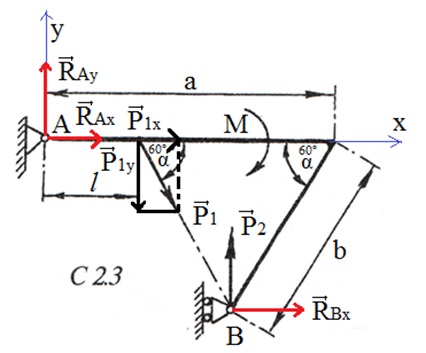
8334 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.3 -исходные данные приведены в таблице 2.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С2.3 |
5 |
3 |
4 |
2,4 |
1,6 |
0,8 |
60° |
|
Теоретическая механика |
C2.3 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
8418 |
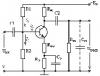
Необходимо рассчитать в зависимости от вариантов задания (табл. 1) следующие параметры усилительного каскада:
а) координаты точки покоя Uкэ.о, Iк.о, ток базы Iб.о, эквивалентное напряжение Eэкв, сопротивления резисторов R1, R2, Rэ при номинальном значении коэффициента β и построить трафик (рис. 2) по рассчитанным численным значениям;
б) исходя из заданной нижней частоты fн и коэффициента усиления Ки.о, рассчитать по формулам сопротивление обратной связи Roc, коэффициент- усиления в области (НЧ) Ku.н и емкости конденсаторов C1, C2, Cэ.
| Вариант |
h21э, (β) |
h22э, мСм |
Eк, В |
Rк, кОм |
Rн, кОм |
Кu,o |
fн, Гц |
| 12 |
47 |
0,05 |
16 |
10 |
6 |
13 |
57 |
|
Электроника |
|
|
300₽ |
|
|
12314 |
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 4 |
40 |
- |
250 |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
142 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
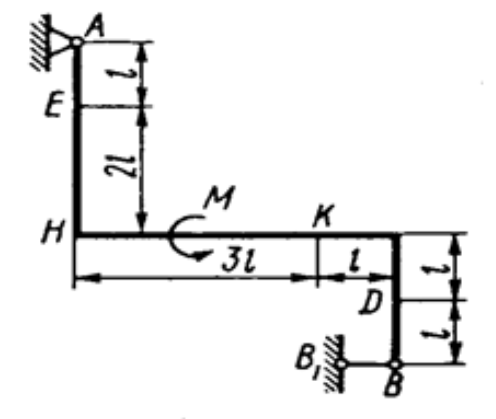
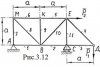
9702 |
СТАТИКА
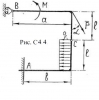
Жесткая рама (рис C1.4, табл. C1) закреплена в точке A шарнирно, а в точке B прикреплена или к невесомому стержню BB1, или к шарнирной опоре на катках, стержень прикреплен к раме и к неподвижной опоре шарнирами
На раму действуют пара сил с моментом M= 100 Н∙м и две силы, значения которых, направления и точки приложения указаны в таблице (например, в условиях № 1 на раму действуют сила F1 = 10 Н под углом 30° горизонтальной оси, приложенная в точке K, и сила F4 = 40 Н под углом 60° к горизонтальной оси, приложенная в точке H).
Определить реакции связей в точках A и B, вызываемые заданными нагрузками. При окончательных подсчетах принять l = 0,5 м.
Указания. Задача С1 — на равновесие тела под действием плоской системы сил. Составляя уравнения равновесия, учесть, что уравнение моментов будет более простым (содержать меньше неизвестных), если брать моменты относительно точки, где пересекаются линии действия двух реакций связей (в данном случае относительно точки A). При вычислении момента силы F часто удобно разложить её на составляющие F' и F", для которых плечи легко вычисляются, в частности на составляющие, параллельные координатным осям, и воспользоваться теоремой Вариньона. Тогда m0(F) = m0(F) + m0(F")
| Сила |
F1 = 10 H |
F2 = 20 H |
F3 = 30 H |
F4 = 40 H |
| Номер условия |
Точка прилож. |
a1 |
Точка прилож. |
a2 |
Точка прилож. |
а3 |
Точка прилож. |
а4 |
| 0 |
- |
- |
D |
60 |
Е |
45 |
- |
- |
|
Теоретическая механика |
|
|
300₽ |
|
|
8516 |
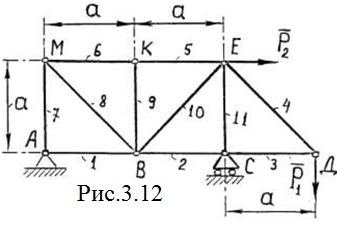
ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. С3.12 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| С3.12 |
1, 8, 6 |
3, 4 |
150 |
130 |
|
Теоретическая механика |
C3.12_1 |
Теоретическая механика |
300₽ |
|
|
10976 |

СОСТАВЛЕНИЕ РАСЧЕТНОЙ СХЕМЫ ПЛОСКОЙ КОНСТРУКЦИИ
Используя принцип освобождаемости от связей, освободить плоскую конструкцию от связей и приложить к ней реакции связей. Равномерно-распределенную нагрузку заменить соответствующей равнодействующей силой. Силы, не параллельные осям координат, разложить на составляющие, параллельные осям координат. Построить расчетную схему конструкции. Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. C1.11, исходные данные приведены в табл. 1.
| Номер варианта |
Р, кН |
G, кН |
M, кН∙м |
q, кН∙м |
l, м |
α, град |
| C1.11 |
10 |
8 |
6 |
2 |
2 |
30° |
|
Теоретическая механика |
C1.11 |
Теоретическая механика 2 |
300₽ |
|
|
12396 |
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 1 |
15 |
120 |
- |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
116 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
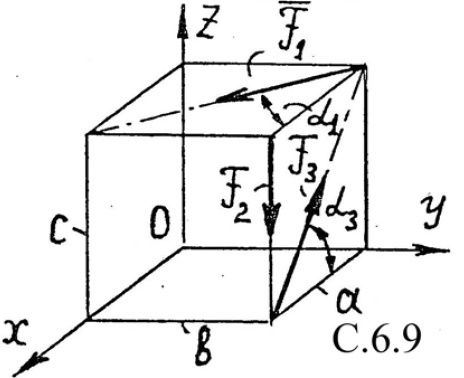
11056 |
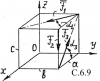
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллелепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C6.9 |
Теоретическая механика 2 |
300₽ |
|
|
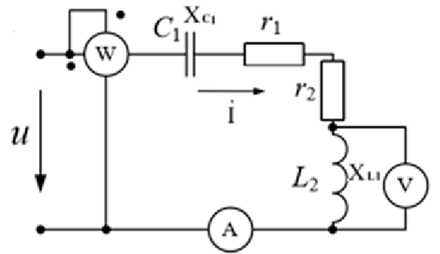
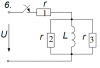
12476 |

Действующее значение переменного напряжения источника U = 220 В. Сопротивления участков цели равны r1 = r2 = 15 Ом; xC1 = 80 Ом; хL1 = xL2 = 20 Ом. Определите действующие значения тока и напряжения на всех элементах цепи; найдите угол сдвига фаз между напряжением и током; составьте баланс активных Р, реактивных Q и полных S мощностей источника и приемников энергии. Постройте векторную диаграмму
|
Электроника |
405 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|