|
6357 |

СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
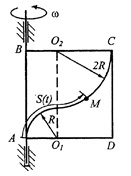
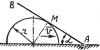
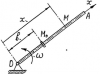
По заданным уравнениям относительного движения точки S = S(t) по переносящему телу и угловой скорости ω = ω(t) этого тела приведенным в таблице, найти абсолютную скорость и абсолютное ускорение точки М в момент времени t1. Варианты расчетных схем изображены на рисунке.
| Номер варианта |
№ Дано |
ω(t), рад/с |
S(t), см |
R, см |
a, см |
t, сек |
| 29 |
1 |
3t |
10∙π∙sin2(π∙t) |
15 |
- |
1/3 |
Точка M пластины движется по дуге окружности радиуса R = 0,15 м вращается вокруг стороны квадрата AB с угловой скоростью ω = 3∙t (рад/с). По дуге окружности точка М двигается согласно уравнению AM = S(t) = 10∙π∙sin2(π∙t) (см). Определить абсолютные скорость и ускорение точки в момент времени t1 =1/3 (с).
|
Теоретическая механика |
D1.18 |
Теоретическая механика |
300₽ |
|
|
14570 |

ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.6 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.6 |
Теоретическая механика 2 |
300₽ |
|
|
8332 |
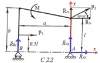
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
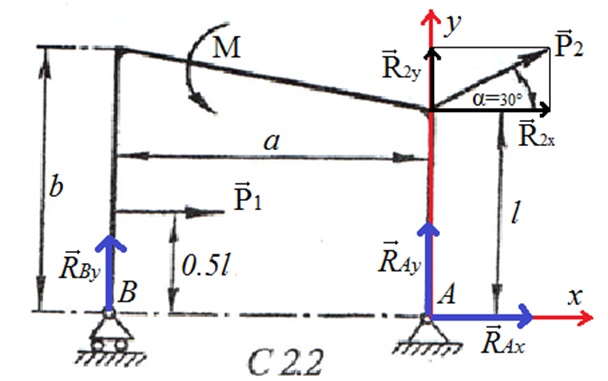
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.2, -исходные данные приведены в таблице 2.
| Номер варианта |
Р1, кН |
P2, кН |
M, кН∙м |
a, м |
b, м |
l, м |
α, град |
| С2.2 |
4 |
4 |
5 |
1,8 |
1,6 |
1.2 |
30° |
|
Теоретическая механика |
C2.2 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
8416 |
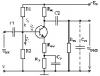
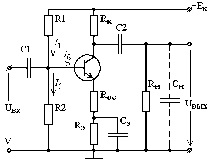
Необходимо рассчитать в зависимости от вариантов задания (табл. 1) следующие параметры усилительного каскада:
а) координаты точки покоя Uкэ.о, Iк.о, ток базы Iб.о, эквивалентное напряжение Eэкв, сопротивления резисторов R1, R2, Rэ при номинальном значении коэффициента β и построить трафик (рис. 2) по рассчитанным численным значениям;
б) исходя из заданной нижней частоты fн и коэффициента усиления Ки.о, рассчитать по формулам сопротивление обратной связи Roc, коэффициент- усиления в области (НЧ) Ku.н и емкости конденсаторов C1, C2, Cэ.
| Вариант |
h21э, (β) |
h22э, мСм |
Eк, В |
Rк, кОм |
Rн, кОм |
Кu,o |
fн, Гц |
| 5 |
53 |
0,02 |
11 |
6 |
4 |
14 |
42 |
|
Электроника |
|
|
300₽ |
|
|
14736 |
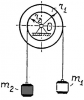
ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ. ПРИНЦИП ДАЛАМБЕРА
Два груза массами m1 и m2 подвешены на двух нитях, навёрнутых на барабаны с общей осью вращения. Радиусы барабанов равны r1 и r2 момент инерции барабанов относительно оси вращения O равен J0. Определить угловое ускорение барабанов.
|
Теоретическая механика |
Д7.8 |
Теоретическая механика 2 |
300₽ |
|
|
5109 |
ПРИНЦИП ДАЛАМБЕРА
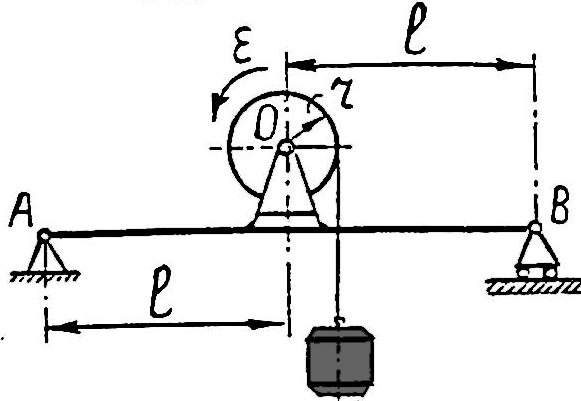
Барабан лебёдки радиусом r, установленной на консольной балке АВ, вращается с угловым ускорением ε. Масса поднимаемого груза – m, масса лебёдки – M. Центр тяжести лебёдки находится на расстоянии l от вертикальной стены. Момент инерции барабана лебёдки вместе с двигателем равен Ј0. Пренебрегая массами каната и самой балки, найти реакции заделки.
|
Теоретическая механика |
Д6.10 |
Теоретическая механика 2 |
300₽ |
|
|
8514 |
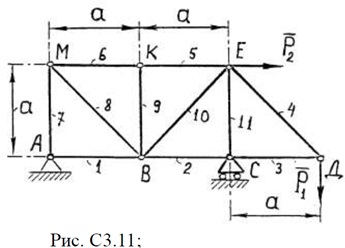
ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
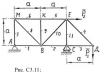
Определить усилия в стержнях плоской фермы рис. С3.11 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| С3.11 |
2, 11, 4 |
6, 7 |
190 |
120 |
|
Теоретическая механика |
C3.11_1 |
Теоретическая механика |
300₽ |
|
|
10854 |
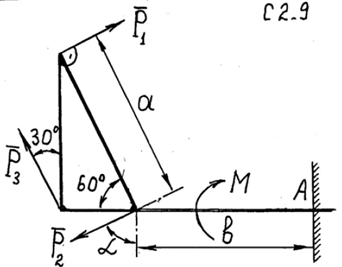
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.9, -исходные данные приведены в таблице 2.
| Номер варианта |
Р1, кН |
P2, кН |
P3, кН |
M кН∙м |
a, м |
b, м |
α, град |
| С-2.9. |
5 |
6 |
4 |
2 |
1.0 |
1.0 |
60° |
|
Теоретическая механика |
C2.9. |
Теоретическая механика 2 |
300₽ |
|
|
11240 |
КИНЕМАТИКА ТОЧКИ
Точка М движется по окружности радиуса R согласно уравнению S = S(t). Определить и построить для момента времени t1 скорость, касательное, нормальное и полное ускорение этой точки. Исходные данные для расчета приведены в табл. 2.
| № варианта |
S = S(t), cм |
R, см |
Время t1, с |
| К2.1 |
8t2 |
4 |
2 |
|
Теоретическая механика |
K2.1 |
Теоретическая механика 2 |
300₽ |
|
|
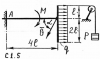
6481 |
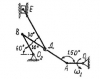
Груз D массой т, получив в точке A начальную скорость движется по изогнутой трубе ABC, расположенной в вертикальной плоскости.
На участке AB трубы на груз, кроме силы тяжести, действует сила сопротивления R, зависящая от скорости v груза D: R = 0,05∙v2.
В точке B груз, изменив направление приобретенной скорости, но сохранив при этом ее величину, переходит на участок BC трубы, где на него, помимо силы тяжести, действует сила трения скольжения (коэффициент трения груза о трубу f = 0,2) и переменная по величине сила F = 0,5∙cos(2∙t), направленная вдоль участка BC. Проекция Fx последней силы на ось Bx задается.
Считая груз D материальной точкой, и зная расстояние AB или время t, движения груза от точки A до точки B, найти уравнение х = х(t) движения груза на участке BC.
Варианты расчетных схем изображены на рисунке.
| Номер варианта |
№ Дано |
m, кг |
v0, м/с |
µ, Н∙с/м |
n |
F, Н |
α, град |
t, сек |
l, м |
| 28 |
2 |
6 |
18 |
0,05 |
2 |
0,5cos(2t) |
30 |
- |
4 |
|
Теоретическая механика |
|
|
300₽ |
|
|
16508 |
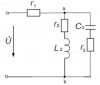
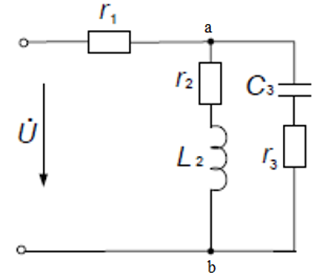
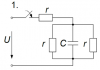
Расчет разветвленной цепи синусоидального тока
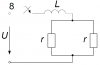
Цепь, изображенная на рис. 2, подключена к источнику синусоидального напряжения u = Umsin ώt.
Требуется:
1. Определить комплексным методом действующие значения токов всех ветвей.
2. По полученным комплексным значениям токов ветвей записать выражения дня их мгновенных значений.
3. Определить активную и реактивную мощности источника и приемников.
4. Составить баланс активных и реактивных мощностей н оценить погрешность расчета.
5. Построить векторную диаграмм токов н напряжений.
Значение напряжения источника, параметры резисторов, индуктивностей н емкостей даны в табл. 2.
Частота питающего напряжения f = 50 Гц.
| Вариант 0 |
U, В |
r1, Ом |
L1, мГн |
C1, мкФ |
r2, Ом |
L2, мГн |
C2, мкФ |
r3, Ом |
L3, мГн |
C3, мкФ |
| 0 |
220 |
4 |
30 |
600 |
12 |
38 |
500 |
4 |
42 |
700 |
|
Электротехника |
2-0-6 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
8236 |
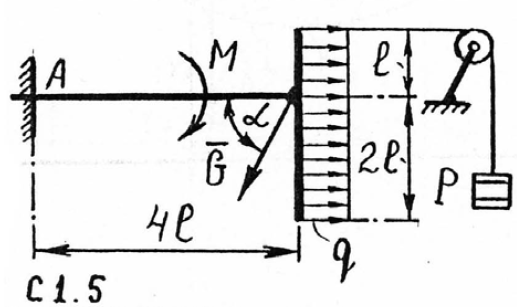
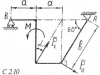
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции. Схемы конструкций указаны на рисунке С1.15, исходные данные приведены в таблице.
| Номер варианта |
P, кН |
G, кН |
M, кНм |
q, кН/м |
l, м |
α, град |
| C1.5 |
20 |
12 |
3 |
4 |
1 |
60° |
|
Теоретическая механика |
C1.5 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
14586 |

ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.14 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.14 |
Теоретическая механика 2 |
300₽ |
|
|
8348 |
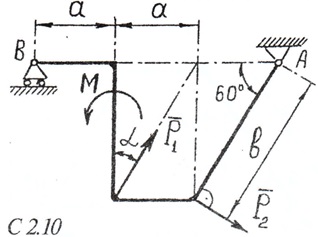
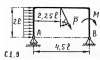
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.10 -исходные данные приведены в таблице 2.
Таблица 2
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| C2.10 |
5 |
4 |
10 |
0,8 |
1,6 |
- |
30° |
|
Теоретическая механика |
C2.10 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
13850 |

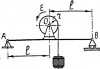
К нижнему шкиву С подъемника приложен вращающий момент М. Определить ускорение груза А массой m1 поднимаемого вверх, если масса противовеса В равна m2 а шкивы C и D радиусами r и массой m каждый представляют собой однородные круглые цилиндры. Массой ремня пренебречь.
|
Теоретическая механика |
Д7.4 |
Теоретическая механика 2 |
300₽ |
|
|
8436 |
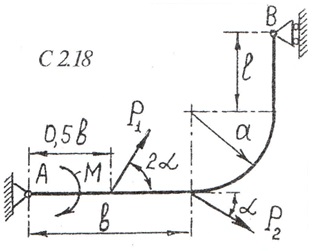
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
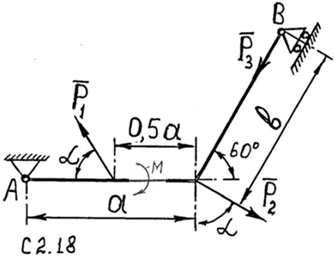
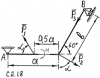
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.18, -исходные данные приведены в таблице 2.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С-2.18 |
6 |
8 |
3 |
1.6 |
1.2 |
1.0 |
30° |
|
Теоретическая механика |
C2.18 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
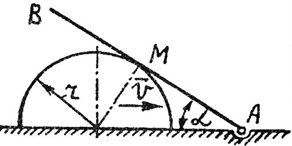
5118 |
Тело в виде полуцилиндра скользит по горизонтальной плоскости со скоростью v = 0,2 м/с, поворачивая шарнирно закрепленный в точке А стержень АВ. Определить относительную скорость точки касания М стержня АВ, если угол α = 30°.
|
Теоретическая механика |
K7.15 |
Теоретическая механика 2 |
300₽ |
|
|
8532 |

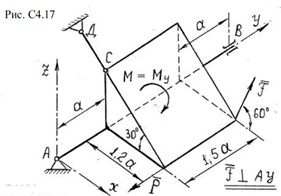
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунках С4.17.
|
Теоретическая механика |
C4.17_1 |
Теоретическая механика |
300₽ |
|
|
10870 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.18, -исходные данные приведены в таблице 2.
| Номер варианта |
Р1, кН |
P2, кН |
P3, кН |
M кН∙м |
a, м |
b, м |
α, град |
| С-2.18. |
8 |
8 |
8 |
3 |
1.0 |
1.0 |
60° |
|
Теоретическая механика |
C2.18. |
Теоретическая механика 2 |
300₽ |
|
|
11266 |
КИНЕМАТИКА ТОЧКИ
Точка М движется по окружности радиуса R согласно уравнению S = S(t). Определить и построить для момента времени t1 скорость, касательное, нормальное и полное ускорение этой точки. Исходные данные для расчета приведены в табл. 2.
| № варианта |
S = S(t), cм |
R, см |
Время t1, с |
| К2.13 |
4t2 + 1 |
4t |
1 |
|
Теоретическая механика |
K2.13 |
Теоретическая механика 2 |
300₽ |
|
|
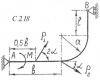
6497 |

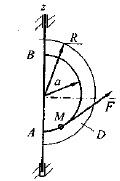
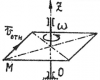
ПРИМЕНЕНИЕ УРАВНЕНИЙ ЛАГРАНЖА ВТОРОГО РОДА К ИЗУЧЕНИЮ ДВИЖЕНИЯ МЕХАНИЧЕСКОЙ СИСТЕМЫ С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ
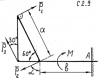
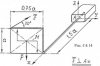
Тело D массой m1 = 50 кг вращается вокруг вертикальной оси O1z под действием пары сил с моментом Mz = -14t2. Варианты расчетных схем изображены на рис. 7.1. При этом по желобу АВ тела D под действием внутренней силы F = (t3 + 4)2, направленной по касательной к желобу (управляющее воздействие), движется материальная точка М массой m2 = 12 кг. Согласно закону равенства действия и противодействия с такой же по величине силой, но направленной в противоположную сторону, точка М действует на тело D.Используя уравнения Лагранжа второго рода составить дифференциальные уравнения движения механической системы в обобщенных координатах. Сопротивлением движению пренебречь.
Тело D рассматривать как тонкую однородную пластину. Форма пластины выбирается в соответствии с вариантом задачи.
| Номер варианта |
m1, кг |
m2, кг |
a, м |
b, м |
R, м |
α, град |
Mz = Mz(t), Н∙м |
F = F(t), Н |
| 20 |
50 |
12 |
1 |
- |
1,2 |
- |
-14t2 |
(t3 + 4)2 |
|
Теоретическая механика |
|
|
300₽ |
|
|
12576 |
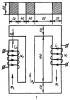
РАСЧЁТ РАЗВЕТВЛЕННОЙ МАГНИТНОЙ ЦЕПИ ПРИ ПОСТОЯННЫХ ТОКАХ
Для магнитной цепи (рис. 5) выполнить следующее:
1. Начертить схему замещения магнитной цепи, указав на ней направления магнитных потоков и магнитодвижущих сил (МДС);
2. Составить для магнитной цепи уравнения по законам Кирхгофа;
3. Определить магнитные потоки в стержнях и значение магнитной индукции в воздушном зазоре.
Размеры магнитопровода на рис. 5 даны в мм. Магнитопровод выполнен из электротехнической стали, кривая намагничивания которой представлена в табл. 2. Величины токов и число витков обмотки для каждого варианта даны в табл. 3.
Таблица 2
| В, Тл |
0 |
0,5 |
0,7 |
0,9 |
1,0 |
1,1 |
1,2 |
1,3 |
1,4 |
1,6 |
1,7 |
1,75 |
| Н, А/м |
0 |
100 |
140 |
200 |
250 |
350 |
500 |
700 |
1000 |
1800 |
2500 |
3000 |
Таблица 3
| Предпоследняя цифра студента |
I1, А |
w1, витков |
w2, витков |
I2, А |
| 1 |
30 |
200 |
30 |
300 |
|
Электротехника |
211 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
14604 |

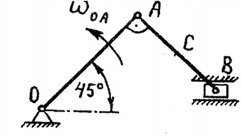
ПЛОСКО-ПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Для заданного положения механизма найти скорости точек В и С, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис. К6.1-К6.20.
OA = 30 см; AB = 60 см; AC = 30 см; ωOA = 6 с-1
|
Теоретическая механика |
K6.11 |
Теоретическая механика 2 |
300₽ |
|
|
8364 |

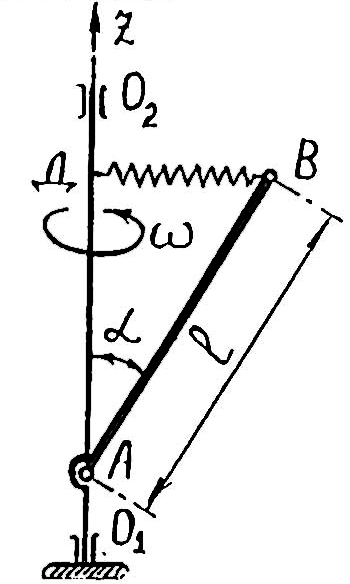
Тонкий однородный стержень АВ массой m, длиной l, закрепленный на оси O1O2 в точке A, вращается вокруг этой оси с постоянной угловой скоростью ω, образуя с ней угол α. Определить усилие в пружине ВД.
|
Теоретическая механика |
Д6.14 |
Теоретическая механика 2 |
300₽ |
|
|
14686 |
На какую высоту H поднимется тело весом Р, брошенное вертикально вверх со скоростью V0, если сила сопротивления воздуха выражается формулой F = kV2, где k - постоянный коэффициент, V - скорость тела?
|
Теоретическая механика |
Д2.11 |
Теоретическая механика 2 |
300₽ |
|
|
8454 |
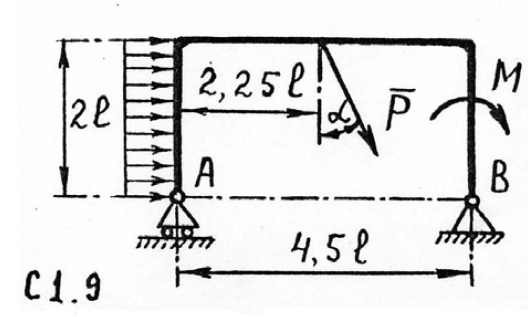
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
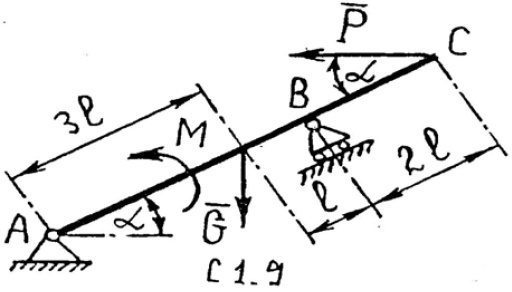
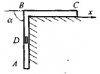
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. C1.9, исходные данные приведены в табл. 1.
| Номер варианта |
P, кН |
G, кН |
M, кНм |
q, кН/м |
l, м |
α, град |
| C1.9 |
20 |
- |
4 |
6 |
1 |
30° |
|
Теоретическая механика |
C1.9 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
14768 |
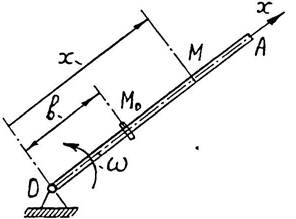
Стержень OA вращается в горизонтальной плоскости вокруг оси O с постоянной угловой скоростью ω. На стержне находится кольцо M, которое удерживается нитью в положении M0. В некоторый момент нить пережигается, и кольцо начинает движение по стержню. Найти уравнение движения кольца по стержню. Пренебречь трением.
|
Теоретическая механика |
Д9.12 |
Теоретическая механика 2 |
300₽ |
|
|
5127 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 4.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.18 |
5∙t - 6∙t2 |
2t |
1 |
|
Теоретическая механика |
K1.18_1 |
Теоретическая механика |
300₽ |
|
|
8548 |
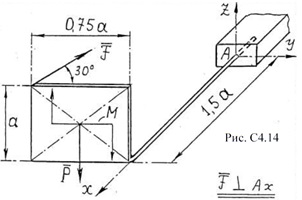
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунках С4.14.
|
Теоретическая механика |
C4.14_1 |
Теоретическая механика |
300₽ |
|
|
10886 |
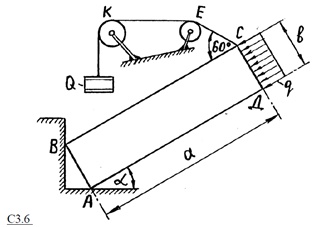
ОПРЕДЕЛЕНИЕ РЕАКЦИИ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
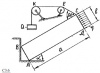
Схемы конструкций построены на рис. СЗ. 1 - С3.20. Однородная прямоугольная плита ABCD весом P нагружена распределенной нагрузкой интенсивности q и удерживается в равновесии под углом α к горизонту при помощи троса, переброшенного через блоки E и K и несущего груз весом Q. Определить вес груза Q и реакции стены и пола. P = 25 кH; q = 10 кH/м; a = 8 м; b = 2 м; α = 30°
|
Теоретическая механика |
C3.6. |
Теоретическая механика 2 |
300₽ |
|
|
8938 |

ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
Для заданного положения механизма найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис. K1.l.
OA = 40 см = 0,40 м; AB = 30 см = 0,30 м; AC = 15 см = 0,15 м; ωOA = 2 c-1.
|
Теоретическая механика |
K6.1 |
Теоретическая механика 2 |
300₽ |
|
|
11196 |
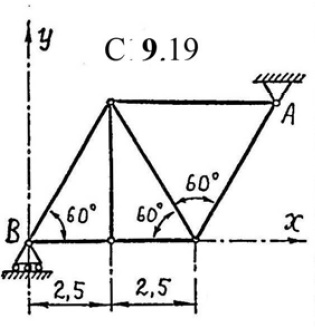
ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ОДНОРОДНОГО ТЕЛА
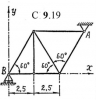
Найти положение центра тяжести плоской фермы, пластинки и объемного тела. Ферма состоит из однородных стержней; пластинка имеет малую постоянную толщину. Схемы тел показаны на рис. C9.19. Размеры ферм даны в метрах, остальных тел - в сантиметрах.
|
Теоретическая механика |
C9.19 |
Теоретическая механика 2 |
300₽ |
|
|
12434 |
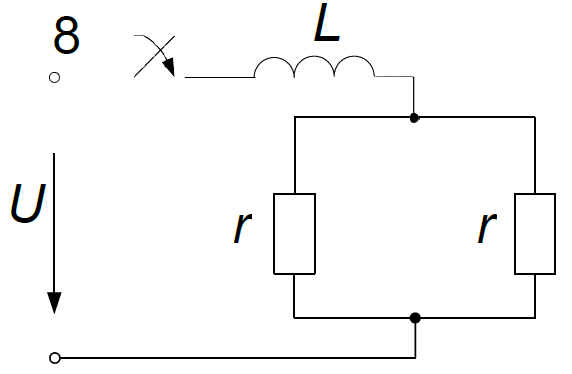
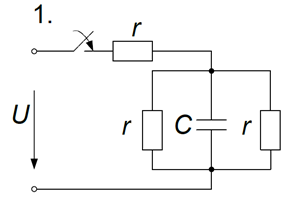
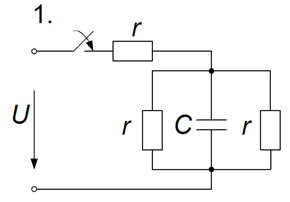
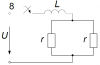
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 0 |
50 |
30 |
- |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
108 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
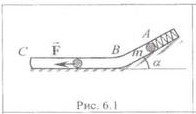
18261 |

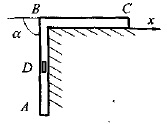
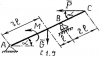
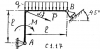
Шарик массы m движется из положения A внутри изогнутой трубки, расположенной в вертикальной плоскости. Шарик, пройдя путь l0, отделяется oт пружины. В точке B шарик, не меняя значения своей скорости, переходит на участок BC, где на него дополнительно действует переменная сила F, направление которой указано на рисунке. Пользуясь общими теоремами динамики точки, определить скорость шарика в положениях B и C. В задании принята следующие обозначения: vA - начальная скорость шарика, AB - длина участка, τ - время движения на участке BC, f - коэффициент трения скольжения шарика по стенке трубки, c - коэффициент жесткости пружины.
| № |
Рис. |
m |
vA |
f |
AB |
l0 |
c |
α |
β |
τ |
F(t) |
| 1 |
|
кг |
м/с |
|
м |
см |
Н/см |
град |
с |
Н |
| 6.1 |
0,4 |
0 |
0,05 |
0,2 |
10 |
1,96 |
30 |
- |
1,5 |
sin 2t |
|
Механика |
|
|
300₽ |
|
|
8638 |
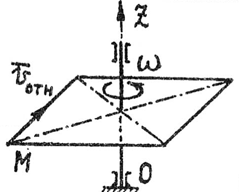
Квадратная плита вращается вокруг оси OZ с угловой скоростью ω = 3 с-1. Вдоль стороны плиты движется точка М с постоянной скоростью vотн = 4 м/с. Определить абсолютную скорость точки М в указанном положении, если сторона пластинки равна 0,3 м.
|
Теоретическая механика |
K7.17 |
Теоретическая механика 2 |
300₽ |
|
|
10972 |
СОСТАВЛЕНИЕ РАСЧЕТНОЙ СХЕМЫ ПЛОСКОЙ КОНСТРУКЦИИ
Используя принцип освобождаемости от связей, освободить плоскую конструкцию от связей и приложить к ней реакции связей. Равномерно-распределенную нагрузку заменить соответствующей равнодействующей силой. Силы, не параллельные осям координат, разложить на составляющие, параллельные осям координат. Построить расчетную схему конструкции. Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. C1.9, исходные данные приведены в табл. 1.
| Номер варианта |
Р, кН |
G, кН |
M, кН∙м |
q, кН∙м |
l, м |
α, град |
| C1.9 |
10 |
15 |
6 |
- |
1 |
30° |
|
Теоретическая механика |
C1.9 |
Теоретическая механика 2 |
300₽ |
|
|
11052 |
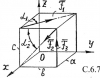
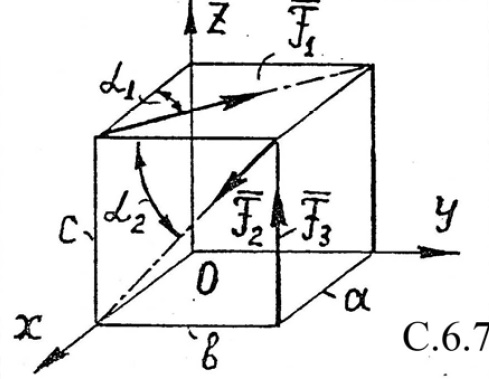
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C6.7 |
Теоретическая механика 2 |
300₽ |
|
|
9062 |

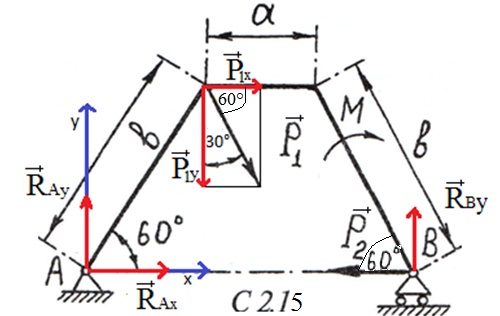
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.1, -исходные данные приведены в таблице 2.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| C2.15. |
20 |
20 |
6 |
3 |
4 |
- |
60° |
|
Теоретическая механика |
C2.15. |
Теоретическая механика |
300₽ |
|
|
12288 |
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 1 |
15 |
- |
100 |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
111 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
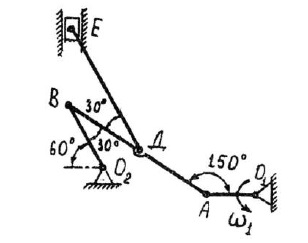
5093 |
 ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
На рис. К3.9 показана схема механизма, причем
О1А = L1 = 0,4 м;
АВ = L2 = 1,4 м;
ДE = L3 = 1,2 м;
O2В = L4 = 0,6 м;
АД = ДВ.
Кривошип O1А вращается вокруг оси O1 с постоянной угловой скоростью ω1 = ωOA = 4 с-1. Для заданного положения механизма построить мгновенные центры скоростей шатунов АВ и ДЕ, найти скорости точек А, В, Д, Е, угловые скорости указанных шатунов и кривошипа О2В, а также ускорение точки В.
|
Теоретическая механика |
K5.9 |
Теоретическая механика 2 |
300₽ |
|
|
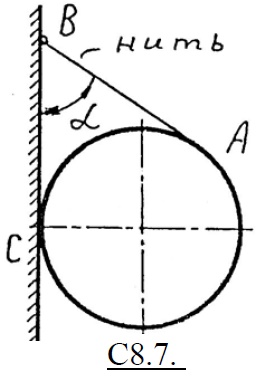
11132 |

ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
Расчетные схемы даны на рис. С8.7. Тяжелое однородное кольцо удерживается в равновесии нитью AB и силой трения, возникающей в точке C его контакта со стеной. При каком соотношении между коэффициентом трения f и утлом α это возможно? (α - угол наклона нити AB к вертикали).
|
Теоретическая механика |
C8.7 |
Теоретическая механика 2 |
300₽ |
|
|
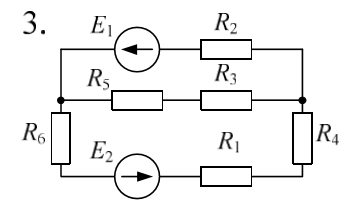
10348 |
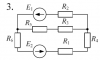
Расчет разветвленной линейной электрической цепи постоянного тока с несколькими источниками электрической энергии.
Для электрической цепи, вариант которой соответствует последней цифре учебного шифра студента и изображенной на рис. 2, выполнить следующее:
1. Составить уравнения для определения токов путем непосредственного применения законов Кирхгофа (указав, для каких узлов и контуров эти уравнения записаны). Решать эту систему уравнений не следует.
2. Определить токи в ветвях методом контурных токов.
3. Определить режимы работы активных элементов и составить баланс мощностей.
Значения ЭДС источников и сопротивлений приемников приведены в табл. 2.
| Предпоследняя цифра учебного шифра студента |
E1, В |
E2, В |
R1, Ом |
R2, Ом |
R3, Ом |
R4, Ом |
R5, Ом |
R6, Ом |
| 7 |
120 |
140 |
10 |
8 |
13 |
20 |
15 |
21 |
|
Электротехника |
273 |
МИИТ. Общая электротехника и электроника. 2016 год |
300₽ |
|
|
11212 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.7 |
2t |
4t - 6t2 |
1 |
|
Теоретическая механика |
K1.7 |
Теоретическая механика 2 |
300₽ |
|
|
12450 |
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 8 |
20 |
80 |
- |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
188 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
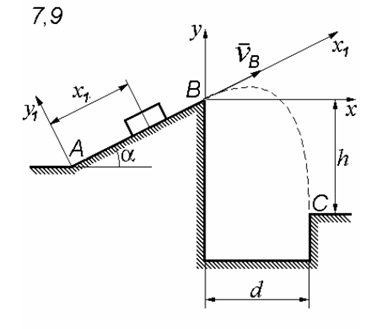
11628 |
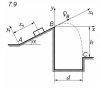
Тело движется из точки A по участку AB (длиной l), наклонному или горизонтальному, в течение τс. Его начальная скорость vA. Коэффициент трения скольжения тела по плоскости равен f. В точке B тело покидает плоскость со скоростью vB и попадает в точку C со скоростью vC, находясь в воздухе в течение T секунд.
При решении задачи тело принять за материальную точку; сопротивление воздуха не учитывать.
Дано: α=30°; l = 4 м; vA = 12 м/c; f = 0,1; h = 6 м
Определить: τ и d.
Задание 5. Схема 7,9, вариант данных 2;7.
|
Механика |
|
|
300₽ |
|
|
8572 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = x(t), у = y(t). найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 4.
| Номер варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| K1.16 |
3t2 + 4t |
-2t |
1 |
|
Теоретическая механика |
K1.16_1 |
Теоретическая механика |
300₽ |
|
|
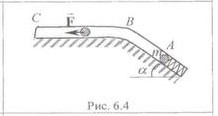
18269 |

Шарик массы m движется из положения A внутри изогнутой трубки, расположенной в вертикальной плоскости. Шарик, пройдя путь l0, отделяется oт пружины. В точке B шарик, не меняя значения своей скорости, переходит на участок BC, где на него дополнительно действует переменная сила F, направление которой указано на рисунке. Пользуясь общими теоремами динамики точки, определить скорость шарика в положениях B и C. В задании принята следующие обозначения: vA - начальная скорость шарика, AB - длина участка, τ - время движения на участке BC, f - коэффициент трения скольжения шарика по стенке трубки, c - коэффициент жесткости пружины.
| № |
Рис. |
m |
vA |
f |
AB |
l0 |
c |
α |
β |
τ |
F(t) |
| 4 |
|
кг |
м/с |
|
м |
см |
Н/см |
град |
с |
Н |
| 6.4 |
0,5 |
4,5 |
0,12 |
0,8 |
10 |
1,9 |
15 |
- |
0,9 |
2,5(1-t/2) |
|
Механика |
|
|
300₽ |
|
|
10988 |
СОСТАВЛЕНИЕ РАСЧЕТНОЙ СХЕМЫ ПЛОСКОЙ КОНСТРУКЦИИ
Используя принцип освобождаемости от связей, освободить плоскую конструкцию от связей и приложить к ней реакции связей. Равномерно-распределенную нагрузку заменить соответствующей равнодействующей силой. Силы, не параллельные осям координат, разложить на составляющие, параллельные осям координат. Построить расчетную схему конструкции. Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. C1.17, исходные данные приведены в табл. 1.
| Номер варианта |
Р, кН |
G, кН |
M, кН∙м |
q, кН∙м |
l, м |
α, град |
| C1.17 |
12 |
6 |
8 |
3 |
1 |
30° |
|
Теоретическая механика |
C1.17 |
Теоретическая механика 2 |
300₽ |
|
|
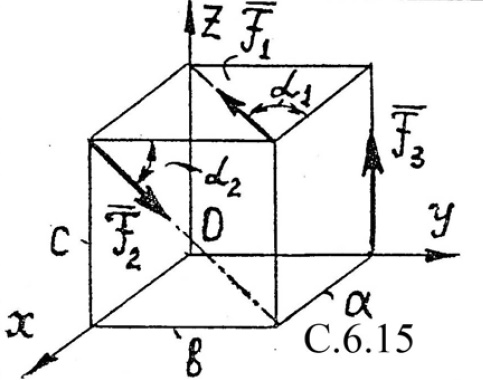
11068 |
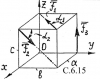
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C6.15 |
Теоретическая механика 2 |
300₽ |
|
|
12304 |
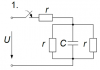
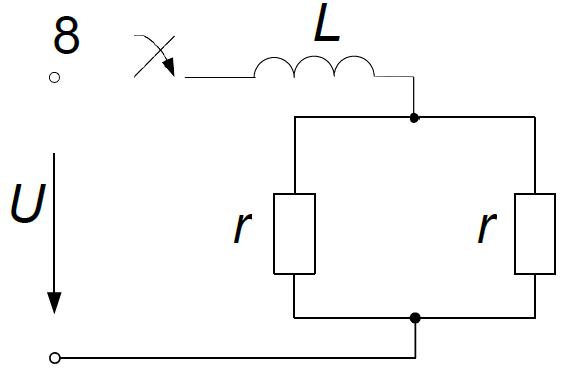
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 0 |
50 |
- |
150 |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
101 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|