|
14560 |
ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
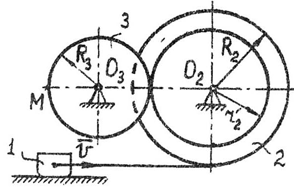
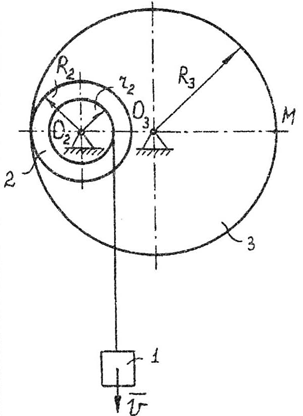
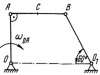
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.1 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.1 |
Теоретическая механика 2 |
300₽ |
|
|
5561 |
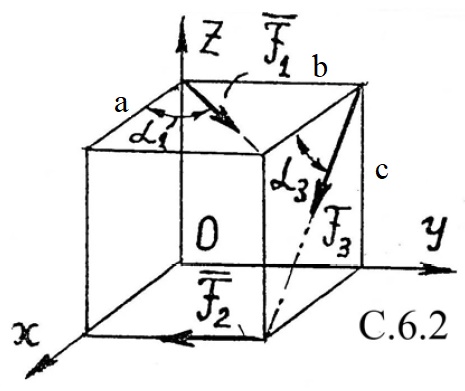
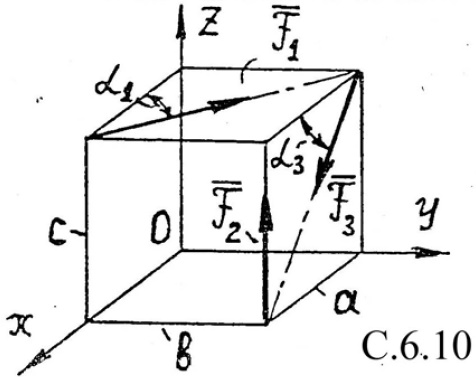
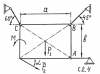
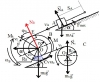
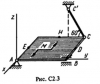
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C2.10. |
МИИТ. Теоретическая механика. 2014 год |
300₽ |
|
|
8616 |
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
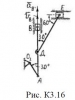
На рис. К3.16 показана схема механизма, причем
О1А = L1 = 0,4 м;
АВ = L2 = 1,4 м;
ДE = L3 = 1,2 м;
O2В = L4 = 0,6 м;
АД = ДВ.
Ползун в данном положении механизма имеет скорость VB = 4 м/с и ускорение aB = 6 м/с2. Для заданного положения механизма построить мгновенные центры скоростей шатунов АВ и ДЕ, найти скорости точек А, Д, Е, угловые скорости указанных шатунов и кривошипа О1А, а также ускорение точки А.
|
Теоретическая механика |
K5.16 |
Теоретическая механика 2 |
300₽ |
|
|
10844 |
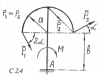
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
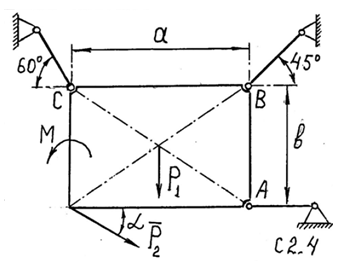
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.17, -исходные данные приведены в таблице 2.
| Номер варианта |
Р1, кН |
P2, кН |
P3, кН |
M кН∙м |
a, м |
b, м |
α, град |
| С-2.4. |
5 |
6 |
0 |
3 |
1.2 |
0.8 |
30° |
|
Теоретическая механика |
C2.4. |
Теоретическая механика 2 |
300₽ |
|
|
5065 |
 ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
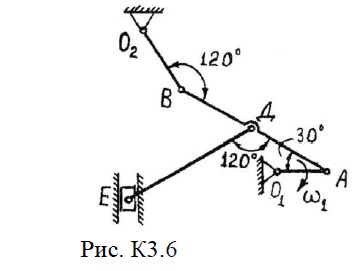
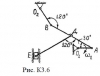
На рис. К3.6 показаны схемы механизмов, причем
О1А = L1 = 0,4 м;
АВ = L2 = 1,4 м;
ДE = L3 = 1,2 м;
02В = L4 = 0,6 м;
АД = ДВ.
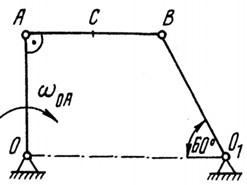
Кривошип O1А вращается вокруг оси O1 с постоянной угловой скоростью ω1 = ωOA = 4 с-1. Для заданного положения механизма построить мгновенные центры скоростей шатунов АВ и ДЕ, найти скорости точек А, В, Д, Е, угловые скорости указанных шатунов и кривошипа О2В, а также ускорение точки В.
|
Теоретическая механика |
K5.6 |
Теоретическая механика 2 |
300₽ |
|
|
13990 |

По стержню AB движется ползун C массой m с постоянной скоростью u относительно стержня. Момент инерции вала со стержнем относительно оси вращения Oz равен Jz. Определить закон изменения угловой скорости вала, если его начальная угловая скорость равна ω0, а ползун, принимаемый за материальную точку, находится при t = 0 на расстоянии b от оси вращения.
|
Теоретическая механика |
Д5.13 |
Теоретическая механика 2 |
300₽ |
|
|
10924 |

ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
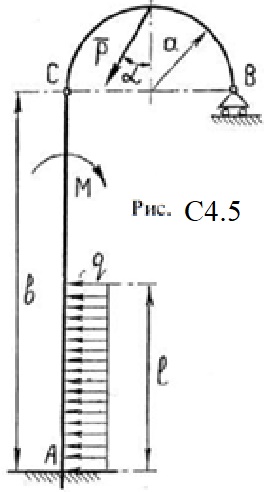
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. C4.5, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| C4.5 |
4 |
3.2 |
3 |
2.5 |
4 |
2.8 |
30° |
|
Теоретическая механика |
C4.5 |
Теоретическая механика 2 |
300₽ |
|
|
8932 |
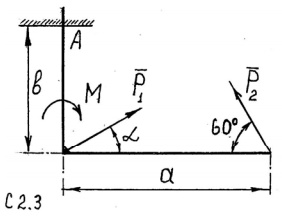
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
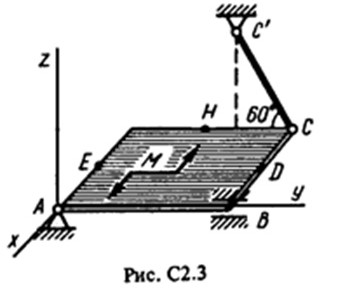
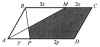
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. С2.8, исходные данные указаны в таблице.
| Номер варианта |
Р1, кН |
P2, кН |
P3, кН |
M, кН м |
a, м |
b, м |
α, град |
| С2.3. |
8 |
7 |
0 |
2 |
1.2 |
0.9 |
30° |
|
Теоретическая механика |
C2.3.-2 |
Теоретическая механика |
300₽ |
|
|
14576 |

ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.9 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.9 |
Теоретическая механика 2 |
300₽ |
|
|
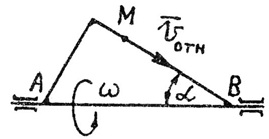
8632 |
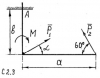
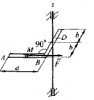
По стороне треугольника, вращающегося вокруг стороны АВ с угловой скоростью ω = 4 с -1, движется точка М с постоянной скоростью vотн = 2 м/с . Определить абсолютную скорость точки в этот момент времени, если длина МВ = 0,3 м., угол α = 30°.
|
Теоретическая механика |
K7.13 |
Теоретическая механика 2 |
300₽ |
|
|
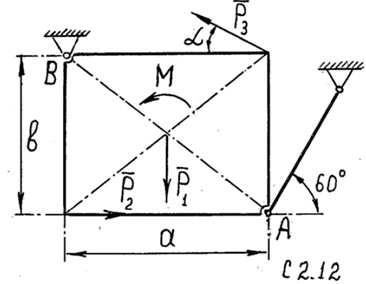
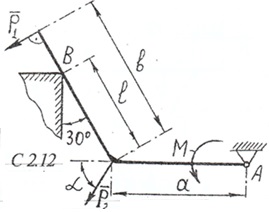
10860 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
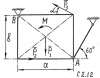
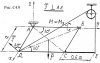
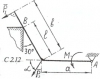
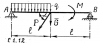
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.12, -исходные данные приведены в таблице 2.
| Номер варианта |
Р1, кН |
P2, кН |
P3, кН |
M кН∙м |
a, м |
b, м |
α, град |
| С-2.12. |
6 |
5 |
6 |
4 |
1.1 |
0.9 |
60° |
|
Теоретическая механика |
C2.12. |
Теоретическая механика 2 |
300₽ |
|
|
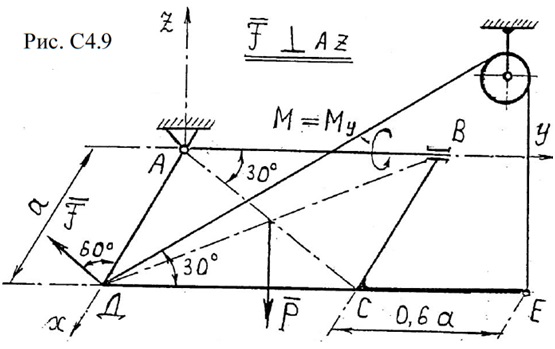
5090 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунках С4.9.
|
Теоретическая механика |
C4.9_1 |
Теоретическая механика |
300₽ |
|
|
11248 |
КИНЕМАТИКА ТОЧКИ
Точка М движется по окружности радиуса R согласно уравнению S = S(t). Определить и построить для момента времени t1 скорость, касательное, нормальное и полное ускорение этой точки. Исходные данные для расчета приведены в табл. 2.
| № варианта |
S = S(t), cм |
R, см |
Время t1, с |
| К2.5 |
2t |
t2 - 3 |
2 |
|
Теоретическая механика |
K2.5 |
Теоретическая механика 2 |
300₽ |
|
|
14110 |
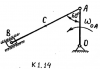
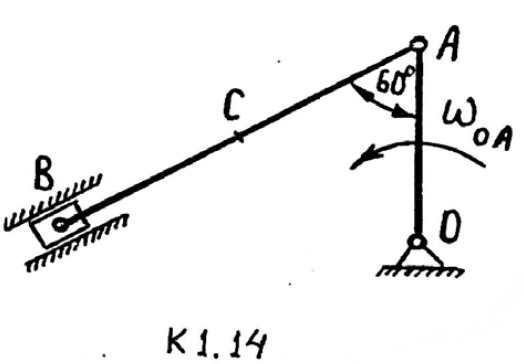
Для заданного механизма найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки.
OA = 30 см; AB = 60 см; AC = 30 см; ωOA = 3 c-1.
|
Теоретическая механика |
K1.14 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
16514 |
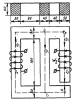
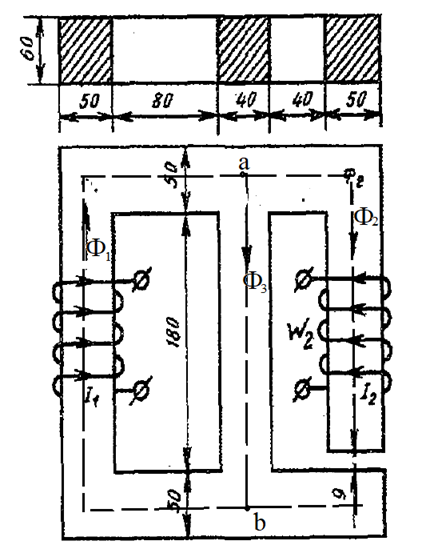
РАСЧЁТ РАЗВЕТВЛЕННОЙ МАГНИТНОЙ ЦЕПИ ПРИ ПОСТОЯННЫХ ТОКАХ
Для магнитной цепи (рис. 5) выполнить следующее:
1. Начертить схему замещения магнитной цепи, указав на ней направления магнитных потоков и магнитодвижущих сил (МДС);
2. Составить для магнитной цепи уравнения по законам Кирхгофа;
3. Определить магнитные потоки в стержнях и значение магнитной индукции в воздушном зазоре.
Размеры магнитопровода на рис. 5 даны в мм. Магнитопровод выполнен из электротехнической стали, кривая намагничивания которой представлена в табл. 2. Величины токов и число витков обмотки для каждого варианта даны в табл. 3.
Таблица 2
| В, Тл |
0 |
0,5 |
0,7 |
0,9 |
1,0 |
1,1 |
1,2 |
1,3 |
1,4 |
1,6 |
1,7 |
1,75 |
| Н, А/м |
0 |
100 |
140 |
200 |
250 |
350 |
500 |
700 |
1000 |
1800 |
2500 |
3000 |
Таблица 3
| Предпоследняя цифра студента |
I1, А |
w1, витков |
w2, витков |
I1, А |
| 0 |
20 |
250 |
18 |
120 |
|
Электротехника |
5-0-6 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
14592 |
ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.17 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.17 |
Теоретическая механика 2 |
300₽ |
|
|
8654 |
ОПРЕДЕЛЕНИЕ СИЛ ПО ЗАДАННОМУ ДВИЖЕНИЮ МАТЕРИАЛЬНОЙ ТОЧКИ
Решето рудообогатительного грохота совершает вертикальные гармонические колебания с амплитудой b = 5 см. Найти наименьшую частоту ω колебаний решета, при котором куски руды, лежащие на нём, отделяются от него и подбрасывают вверх.
|
Теоретическая механика |
Д1.18 |
Теоретическая механика 2 |
300₽ |
|
|
14758 |
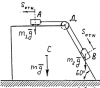
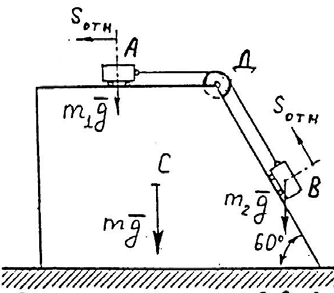
По призме C массой m = 7 кг могут двигаться тележки A и B массами m1 = 1 кг и m2 = 2 кг соответственно. Тележки связаны невесомой нитью, переброшенной через неподвижный блок Д. В начальный момент система находится в покое, затем тележка A начинает двигаться относительно призмы влево по закону Sотн = 5t2 (м). Определить ускорение призмы.
|
Теоретическая механика |
Д9.7 |
Теоретическая механика 2 |
300₽ |
|
|
10876 |
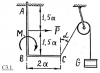
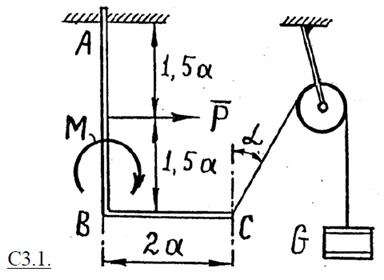
ОПРЕДЕЛЕНИЕ РЕАКЦИИ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Схемы конструкций построены на рис. СЗ. 1 - С3.20. Кронштейн ABC, весом которого пренебрегаем, испытывает действие груза весом G, пары сип с моментом M и силы P. Определить реакции заделки.
G = 4 кН; P = 9 кН; M = 12 кНм; a = 1,5 м; α = 45°.
|
Теоретическая механика |
C3.1. |
Теоретическая механика 2 |
300₽ |
|
|
5100 |
 ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. С2.10, исходные данные указаны в таблице.
| Номер варианта |
Р, кН |
М, кНм |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С2.10 |
4 |
1.6 |
3 |
1 |
3.0 |
1.5 |
60 |
|
Теоретическая механика |
C2.10_1 |
Теоретическая механика |
300₽ |
|
|
14030 |
При небольших скоростях сила сопротивления движению поезда выражается формулой $R=P+k \cdot v$, где Р и к — постоянные величины, v — скорость поезда. Найти закон движения поезда при его разгоне, если сила тяги электропоезда равна Т, а масса поезда равна m.
|
Теоретическая механика |
Д2.1 |
Теоретическая механика 2 |
300₽ |
|
|
11280 |
КИНЕМАТИКА ТОЧКИ
Точка М движется по окружности радиуса R согласно уравнению S = S(t). Определить и построить для момента времени t1 скорость, касательное, нормальное и полное ускорение этой точки. Исходные данные для расчета приведены в табл. 2.
| № варианта |
S = S(t), cм |
R, см |
Время t1, с |
| К2.20 |
2t |
4t2 + 3 |
0,5 |
|
Теоретическая механика |
K2.20 |
Теоретическая механика 2 |
300₽ |
|
|
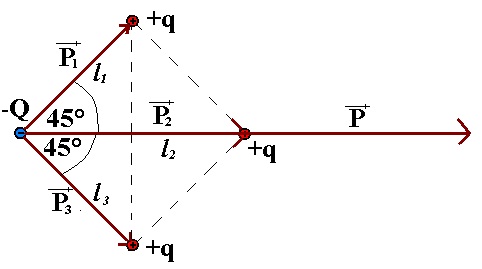
4294 |
 В трех вершинах квадрата со стороной 0,1 м помещены одинаковые положительные заряды 10 мкКл. в четвертой - отрицательный заряд -30 мкКл. Найти дипольный момент квадрата. В трех вершинах квадрата со стороной 0,1 м помещены одинаковые положительные заряды 10 мкКл. в четвертой - отрицательный заряд -30 мкКл. Найти дипольный момент квадрата.
|
Электростатика |
|
|
300₽ |
|
|
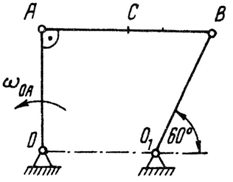
12590 |
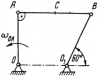
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис. K6.1-K6.20
OA = 30 см = 0,30 м; AB = 50 см = 0,50 м; AC = 25 см = 0,25 м; ωOA = 3 c-1.
|
Теоретическая механика |
K6.15 |
Теоретическая механика 2 |
300₽ |
|
|
8118 |

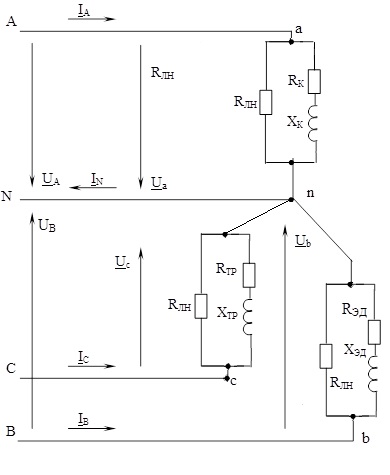
ЗАДАНИЕ № 2 «РАСЧЕТ ТРЁХФАЗНОЙ ЦЕПИ»
3.1. Внутри здания сети внутреннего электроснабжения выполнены по схеме "звезда" с нейтральным проводом. Отдельные помещения подключены к разным фазам трехфазного источника электроэнергии с линейным напряжением Uл = 380 В и частотой тока f = 50 Гц. На основании данных табл. 3.1 - 3.2 определить для своего варианта (последняя цифра трехзначного варианта из предыдущего задания – номер строки в табл. 3.2, предпоследняя цифра – номер строки в табл. 3.1) нагрузку каждой фазы, причем электропотребители в фазе включаются параллельно. Считая лампу накачивания (ЛН) активной нагрузкой, калорифер (К), электродвигатель (ЭД) и трансформатор (ТР) активно-индуктивной нагрузкой, начертить электрическую схему замещения рассчитываемой трехфазной цепи для своего варианта.
3.2. Выполнить анализ электрического состояния полученной в п. 3.1 схемы при наличии нейтрального провода:
1) определить активное, реактивное и полное сопротивления каждого электропотребителя;
2) рассчитать токи, протекающие через каждый электропотребитель (токи в параллельных ветвях каждой фазы);
3) определить для каждой фазы полное сопротивление, активную, реактивную и полную мощность, коэффициент мощности;
4) рассчитать линейные токи и ток в нейтральном проводе;
5) определить для всей трехфазной нагрузки активную PН, реактивную QН и полную SН мощности, коэффициент мощности cos φH и составить баланс мощностей;
6) построить в масштабе совмещенную векторную диаграмму напряжений и токов.
Таблица 3.1. Вид нагрузки в фазах
| Номер строки |
Электроприемники в фазах |
| Фаза A |
Фаза B |
Фаза C |
| 7 |
ЛН, К |
ЛН, ЭД |
ЛН ТР |
Таблица 3.2. Параметры нагрузки
| Номер строки |
ЛН |
К |
ТР |
Эд |
| PЛН |
PК |
cos φК |
SТР |
cos φТР |
PЭД |
КПД |
cos φЭД |
| 5 |
500 |
800 |
0,98 |
630 |
0,69 |
120 |
0,64 |
0,84 |
3.3. Примечания:
1. Для всех токов и напряжений определить действующее значение и начальную фазу.
2. На схеме замещения изображать активную нагрузку в виде резистора, активно-индуктивную нагрузку в виде последовательного соединения резистора и идеальной индуктивной катушки.
3. Баланс мощностей должен сойтись с погрешностью менее 1%.
|
Электротехника |
|
|
300₽ |
|
|
14610 |
ПЛОСКО-ПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Для заданного положения механизма найти скорости точек В и С, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис. К6.1-К6.20
ОА = 30 см, АВ = 40 см, АС = 20 см, ωОА = 2 с-1
|
Теоретическая механика |
K6.16 |
Теоретическая механика 2 |
300₽ |
|
|
8584 |
ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Вращение маховика в период пуска машины происходит по закону φ = 0.5πt3, где φ задан в радианах, а время t - в секундах. Найти скорость и ускорение точки маховика, отстоящей от оси вращения на 0.3 м в момент, когда маховик совершил 16 оборотов.
|
Теоретическая механика |
K4.4 |
Теоретическая механика 2 |
300₽ |
|
|
16579 |

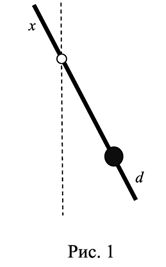
Физический маятник представляет собой тонкий однородный стержень длиной l = 1 м и массой m, на котором жестко закреплена материальная точка массой M на расстоянии d (d < l/2) от нижнего конца стержня. Точка подвеса маятника находится на расстоянии x (x < l/2) от верхнего конца стержня (рис. 1). Найти зависимость периода малых колебаний T маятника от расстояния x и построить график этой зависимости T(x) в интервале изменения x от 0 до l/2. Определить по графику минимальное значение периода T колебаний маятника. Ускорение свободного падения g = 9,81 м/c2.
| № варианта |
d, M/m |
| 9 |
d = 0,25 м, M/m = 0,5 |
|
Механика |
|
|
300₽ |
|
|
6361 |
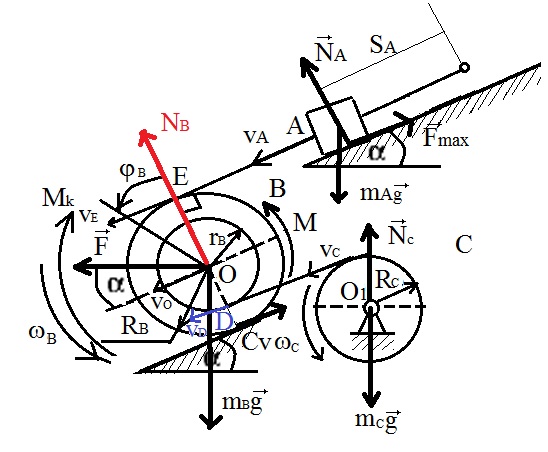
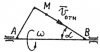
ПРИМЕНЕНИЕ ТЕОРЕМЫ ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ К ИЗУЧЕНИЮ ДВИЖЕНИЯ МЕХАНИЧЕСКОЙ СИСТЕМЫ. Механическая система, изображенная на рисунке, приводится в движение из состояния покоя. При этом колесо B катится без скольжения по плоскости. Массы тел A, B и C) (mA, mB, mC), заданная нагрузка (F и M) и радиус инерции ρB колеса B приведены в таблице. Радиусы колеса B и шкива C соответственно равны RB = 0,8 м, rB = 0,5 м, Rc = 0,2 м. Углы α и β имеют значения: α = 30°, β = 60°. Коэффициент трения качения колеса B равен k = 0,05∙RB; коэффициент трения скольжения тела A равен f = 0,1.
Используя теорему об изменении кинетической энергии системы, определить скорость и ускорение тела A после того, как оно переместится на расстояние SA = 2 м. Шкив C считать однородным сплошным диском; силами сопротивления в подшипниках, массой троса, его растяжением и проскальзыванием по ободу шкива пренебречь.
Числовые значения параметров контрольной работы Д4 вариант №29 (1)
| Номер варианта |
№ Дано |
mA, кг |
mB, кг |
mC, кг |
M, Н∙м |
F, Н |
ρB, см |
| 29 |
1 |
30 |
120 |
80 |
200 |
40 |
0,7 |
|
Теоретическая механика |
D3.29 |
Теоретическая механика |
300₽ |
|
|
11042 |
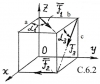
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллелепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C6.2 |
Теоретическая механика 2 |
300₽ |
|
|
14212 |
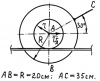
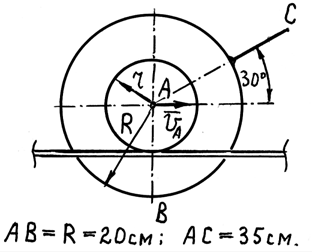
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис.
AB = R = 20 см = 0,20 м; r = 10 см = 0,10 м; AC = 35 см = 0,35 м; vA = 45 см/с = 0,45 м/c.
|
Теоретическая механика |
K6.8 |
Теоретическая механика 2 |
300₽ |
|
|
11122 |
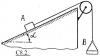
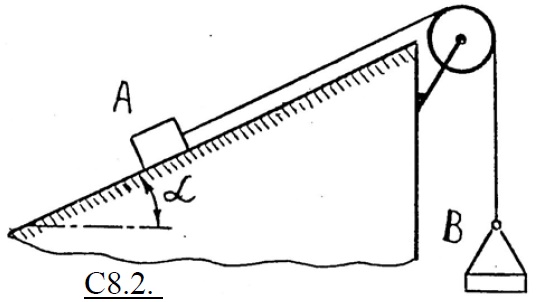
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
Расчетные схемы даны на рис. С8.2. Груз A весом P лежит на наклонной плоскости с углом α. Определить наибольший вес Qmax груза B, при котором возможно равновесие, если коэффициент трения между грузом A и плоскостью равен f.
|
Теоретическая механика |
C8.2 |
Теоретическая механика 2 |
300₽ |
|
|
14298 |

Барабан массой т и радиусом r приводится во вращательное движение из состояния покоя моментом М. Определить ускорение поднимаемого с помощью троса груза массой m1. Барабан считать однородным цилиндром, массой троса пренебречь.
|
Теоретическая механика |
Д7.20 |
Теоретическая механика 2 |
300₽ |
|
|
12360 |
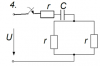
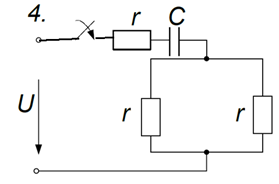
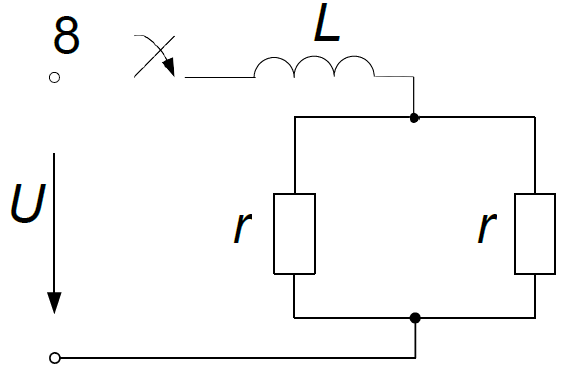
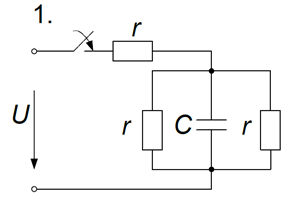
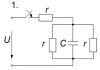
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 7 |
30 |
- |
125 |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
174 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
11202 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.2 |
3cosπt |
4sinπt |
5/6 |
|
Теоретическая механика |
K1.2 |
Теоретическая механика 2 |
300₽ |
|
|
8336 |
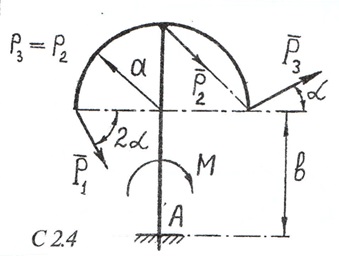
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.4 -исходные данные приведены в таблице 2.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С2.4 |
2 |
3 |
3 |
0,8 |
1,2 |
- |
30° |
|
Теоретическая механика |
C2.4 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
12440 |
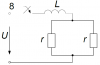
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 2 |
25 |
100 |
- |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
128 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
8420 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.12, -исходные данные приведены в таблице 2.
Таблица 2
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С-2.12 |
3 |
4 |
7 |
1,6 |
1,8 |
1,2 |
60° |
|
Теоретическая механика |
C2.12 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
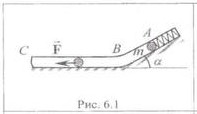
18264 |

Шарик массы m движется из положения A внутри изогнутой трубки, расположенной в вертикальной плоскости. Шарик, пройдя путь l0, отделяется oт пружины. В точке B шарик, не меняя значения своей скорости, переходит на участок BC, где на него дополнительно действует переменная сила F, направление которой указано на рисунке. Пользуясь общими теоремами динамики точки, определить скорость шарика в положениях B и C. В задании принята следующие обозначения: vA - начальная скорость шарика, AB - длина участка, τ - время движения на участке BC, f - коэффициент трения скольжения шарика по стенке трубки, c - коэффициент жесткости пружины.
| № |
Рис. |
m |
vA |
f |
AB |
l0 |
c |
α |
β |
τ |
F(t) |
| 17 |
|
кг |
м/с |
|
м |
см |
Н/см |
град |
с |
Н |
| 6.1 |
0,6 |
0 |
0,12 |
0,5 |
15 |
0,9 |
60 |
- |
1,2 |
- |
|
Механика |
|
|
300₽ |
|
|
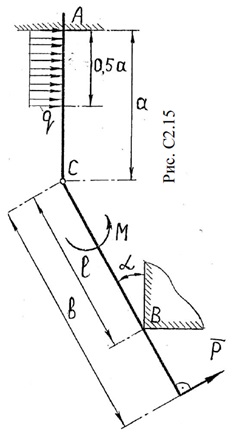
5112 |
 ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. С2.15, исходные данные указаны в таблице.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С2.15 |
5 |
3,6 |
3 |
2,3 |
4,0 |
1,8 |
30° |
|
Теоретическая механика |
C2.15_1 |
Теоретическая механика |
300₽ |
|
|
9704 |
Однородная прямоугольная плита весом P = 5 кН со сторонами AB = 3l = 2,4 м, BC = 2l = 2∙0,8 = 1,6 м закреплена в точке A сферическим шарниром, а в точке B цилиндрическим шарниром (подшипником) и удерживается в равновесии невесомым стержнем СС’ (рис. C2.4)
|
Теоретическая механика |
|
|
300₽ |
|
|
16705 |
Какую часть площади параллелограмма составляет площадь заштрихованной фигуры?
|
Геометрия |
|
|
300₽ |
|
|
8518 |

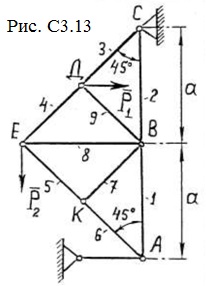
ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. С3.13 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| С3.13 |
1,7,5 |
2,3 |
70 |
120 |
|
Теоретическая механика |
C3.13_1 |
Теоретическая механика |
300₽ |
|
|
3285 |
 ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Угловая скорость винта совершившего посадку самолета, равная в данный момент ω0 = 80π с-1, через t1 = 10 секунд после выключения мотора становится равной ω = 40π с-1. Считая вращение винта равнозамедленным, определить скорость и ускорение точки винта в момент t2 = 12 с, если расстояние до этой точки от оси вращения равно 1,5 м.
|
Теоретическая механика |
K4.7 |
Теоретическая механика 2 |
300₽ |
|
|
10978 |
СОСТАВЛЕНИЕ РАСЧЕТНОЙ СХЕМЫ ПЛОСКОЙ КОНСТРУКЦИИ
Используя принцип освобождаемости от связей, освободить плоскую конструкцию от связей и приложить к ней реакции связей. Равномерно-распределенную нагрузку заменить соответствующей равнодействующей силой. Силы, не параллельные осям координат, разложить на составляющие, параллельные осям координат. Построить расчетную схему конструкции. Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. C1.12, исходные данные приведены в табл. 1.
| Номер варианта |
Р, кН |
G, кН |
M, кН∙м |
q, кН∙м |
l, м |
α, град |
| C1.12 |
15 |
12 |
8 |
1 |
1,5 |
60° |
|
Теоретическая механика |
C1.12 |
Теоретическая механика 2 |
300₽ |
|
|
11058 |
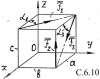
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C6.10 |
Теоретическая механика 2 |
300₽ |
|
|
9920 |
Два контура в виде равностороннего треугольника и окружности радиусом 20 см расположены в двух взаимно перпендикулярных плоскостях. Центр окружности совпадает с одной из вершин треугольника. Сторона треугольника равна 20 см. В контурах протекают равные по величине токи силой 5 А. Определить (в мкТл) значение магнитной индукции в точке, совпадающей с центром окружности.
|
Электромагнетизм |
|
|
300₽ |
|
|
12294 |
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
Таблица № 1
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 4 |
40 |
- |
250 |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электроника |
141 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
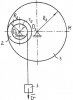
6485 |
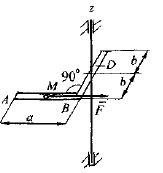
ПРИМЕНЕНИЕ УРАВНЕНИЙ ЛАГРАНЖА ВТОРОГО РОДА К ИЗУЧЕНИЮ ДВИЖЕНИЯ МЕХАНИЧЕСКОЙ СИСТЕМЫ С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ
Тело D массой m1 = 30 кг вращается вокруг вертикальной оси O1z под действием пары сил с моментом Mz = 15∙t2 - 10∙t3. Варианты расчетных схем изображены на рисунке. При этом по желобу АВ тела D под действием внутренней силы F = 1,5(t2 + 3), направленной по касательной к желобу (управляющее воздействие), движется материальная точка М массой m2 = 5 кг. Согласно закону равенства действия и противодействия с такой же по величине силой, но направленной в противоположную сторону, точка М действует на тело D.
Используя уравнения Лагранжа второго рода составить дифференциальные уравнения движения механической системы в обобщенных координатах. Сопротивлением движению пренебречь.
| Номер варианта |
m1, кг |
m2, кг |
a, м |
b, м |
R, м |
α, град |
Mz = Mz(t), Н∙м |
F = F(t), Н |
| 30 |
30 |
5 |
3 |
1 |
- |
- |
15∙t2 - 10∙t3 |
1.5∙(t2 + 3) |
|
Теоретическая механика |
|
|
300₽ |
|
|
11138 |
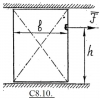
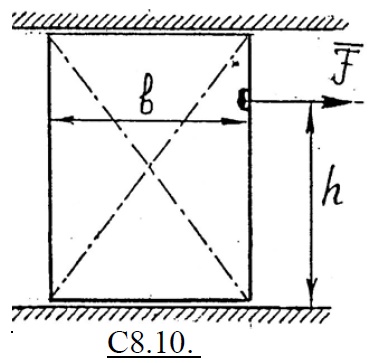
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
Расчетные схемы даны на рис. С8.10. Дверь в купе железнодорожного вагона может скользить в горизонтальных желобах, расположенных сверху и снизу. Коэффициент трения между дверью и нижним желобом равен f. Центр тяжести двери лежит на оси симметрии. Найти наибольшую высоту h ручки двери, при которой дверь не будет перекашиваться в желобах, если ее вес равен G, а ширина равна b.
|
Теоретическая механика |
C8.10 |
Теоретическая механика 2 |
300₽ |
|