|
10910 |
ОПРЕДЕЛЕНИЕ РЕАКЦИИ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Схемы конструкций построены на рис. СЗ. 1 - С3.20.
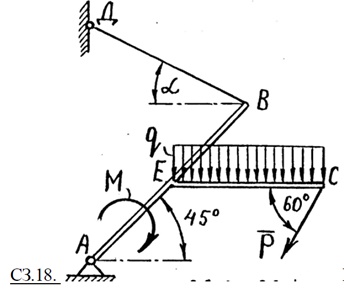
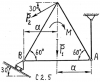
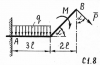
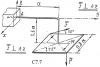
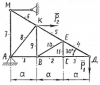
Кронштейн ABC, нагруженный силой P, распределенной нагрузкой интенсивностью и парой сил с моментом M, удерживается под углом 45° к горизонту тросом BD. Найти натяжение троса и реакцию шарнира A.
P = 12 кН; q = 15 кН/м; M = 8 кН м; AE = EB = 3 м; EC = 4 м; α = 30°.
|
Теоретическая механика |
C3.18. |
Теоретическая механика 2 |
300₽ |
|
|
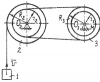
14064 |

При пуске в ход лебедки к барабану А приложен вращающий момент, пропорциональный времени M = λt где λ - коэффициент пропорциональности; t - время. Груз В массой m1 поднимается при помощи каната, намотанного на барабан A радиусом r и массой m2. Определить угловую скорость барабана, считая его сплошным цилиндром.
|
Теоретическая механика |
Д5.19 |
Теоретическая механика 2 |
300₽ |
|
|
13354 |
Шар массой m1, летящий со скоростью v1, сталкивается с неподвижным шаром массой m2. После удара шары разлетаются под углом α друг к другу. Удар абсолютно упругий, столкновение происходит в горизонтальной плоскости. Найти скорости шаров u1 и u2 после удара.
| № варианта |
m1, v1, m2, α |
| 17 |
m1 = 350 г, v1 = 20 м/с, m2 = 200 г, α = 60° |
|
ФИЗИКА |
3-3-17 |
ТГУ. Практические занятия по физике. 2019 год |
300₽ |
|
|
14562 |
ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
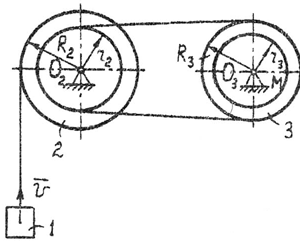
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.2 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.2 |
Теоретическая механика 2 |
300₽ |
|
|
14728 |

ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА
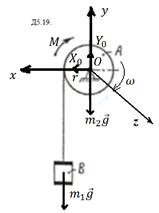
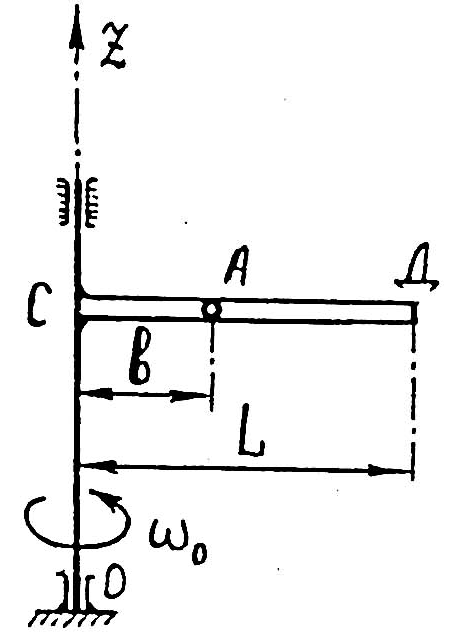
Горизонтальная трубка может свободно вращаться вокруг вертикальной оси Oz. Внутри трубки на расстоянии AC = b находится шарик A. В некоторый момент трубке сообщается угловая скорость ω0. Определить угловую скорость трубки в момент, когда шарик вылетит из трубки. Момент инерции трубки относительно оси вращения равен Jz, L – её длина. Трением пренебречь. Шарик считать материальной точкой массой m.
|
Теоретическая механика |
Д5.18 |
Теоретическая механика 2 |
300₽ |
|
|
10846 |
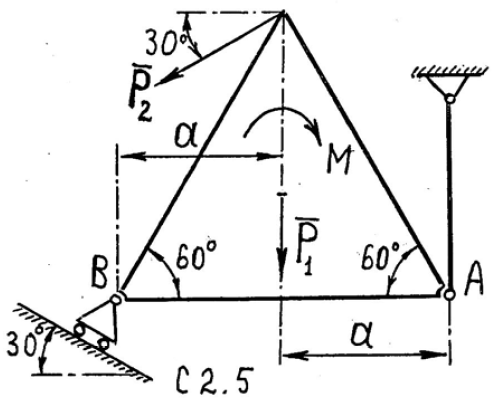
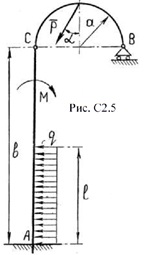
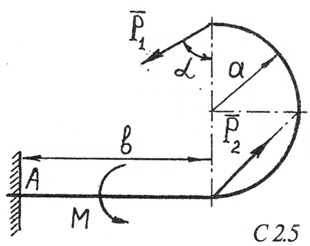
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.5, -исходные данные приведены в таблице 2.
| Номер варианта |
Р1, кН |
P2, кН |
P3, кН |
M кН∙м |
a, м |
b, м |
α, град |
| С-2.5. |
6 |
8 |
0 |
4 |
0.6 |
0 |
0° |
|
Теоретическая механика |
C2.5. |
Теоретическая механика 2 |
300₽ |
|
|
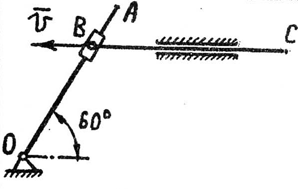
5066 |
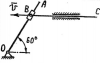
Стержень ВС кулисного механизма движется со скоростью v = 1 м/с. Для указанного положения механизма определить угловую скорость кулисы ОА, если расстояние ОВ = 0,7 м
|
Теоретическая механика |
K7.6 |
Теоретическая механика 2 |
300₽ |
|
|
13992 |
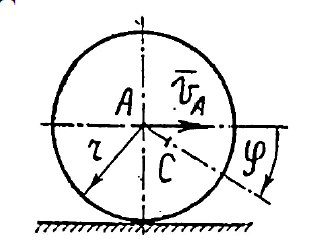
ПРИНЦИП ДАЛАМБЕРА
Ось колеса A массой m = 300 кг, радиусом r = 0,5 м движется с постоянной скоростью VА = 20 м/с. Центр тяжести С колеса смещен от его оси А на расстояние АС = h = 0,02 м. Определить давление колеса на рельс, когда его центр тяжести занимает наинизшее положение. Колесо катится без скольжения.
|
Теоретическая механика |
Д6.13 |
Теоретическая механика 2 |
300₽ |
|
|
10926 |
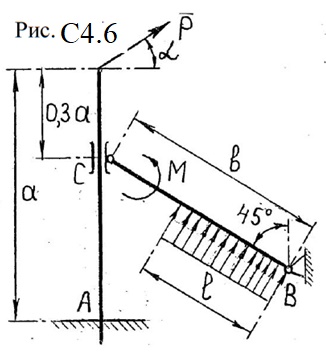
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
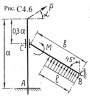
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. C4.6, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| C4.6 |
2 |
2 |
1 |
1.8 |
2.5 |
0.8 |
60° |
|
Теоретическая механика |
C4.6 |
Теоретическая механика 2 |
300₽ |
|
|
8934 |
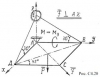
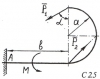
ОПРЕДЕЛЕНИЕ ХАРАКТЕРИСТИК ДЕЙСТВИЯ ПРОСТРАНСТВЕННОЙ СИСТЕМЫ СИЛ
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C2.3 |
МИИТ. Теоретическая механика. 2014 год |
300₽ |
|
|
8462 |
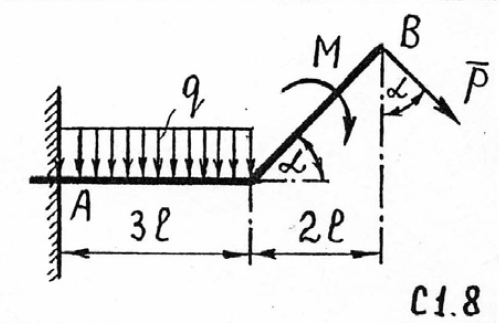
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции. Схемы конструкций указаны на рисунке С1.8, исходные данные приведены в таблице.
| Номер варианта |
P, кН |
G, кН |
M, кНм |
q, кН/м |
l, м |
α, град |
| C1.8 |
8 |
- |
3 |
2 |
1 |
450 |
|
Теоретическая механика |
C1.8 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
5130 |
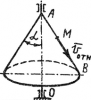
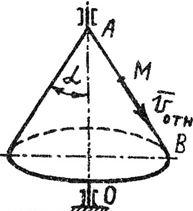
Конус вращается вокруг оси OZ с постоянной угловой скоростью ω = 3 с-1. По его образующей с постоянной скоростью vотн = 2 м/с движется точка М в направлении от А к В (рис. К 2.8). Определить абсолютную скорость этой точки в положении, когда расстояние АМ = 0,8 м, если угол α =30°.
|
Теоретическая механика |
K7.18 |
Теоретическая механика 2 |
300₽ |
|
|
8554 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунках С4.20.
|
Теоретическая механика |
C4.20_1 |
Теоретическая механика |
300₽ |
|
|
11012 |

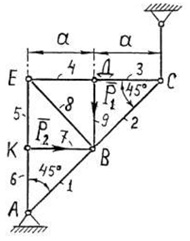
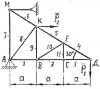
ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. C5.7 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| C5.7 |
1, 9, 3 |
4, 5 |
150 |
120 |
|
Теоретическая механика |
C5.7 |
Теоретическая механика 2 |
300₽ |
|
|
9022 |
СТАТИКА
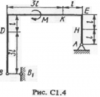
Жесткая рама (рис C1.4, табл. C1) закреплена в точке A шарнирно, а в точке B прикреплена или к невесомому стержню BB1, или к шарнирной опоре на катках, стержень прикреплен к раме и к неподвижной опоре шарнирами
На раму действуют пара сил с моментом M = 100 Н∙м и две силы, значения которых, направления и точки приложения указаны в таблице (например, в условиях № 1 на раму действуют сила F1 = 10 Н под углом 30° горизонтальной оси, приложенная в точке K, и сила F4 = 40 Н под углом 60° к горизонтальной оси, приложенная в точке H).
Определить реакции связей в точках A и B, вызываемые заданными нагрузками. При окончательных подсчетах принять l = 0,5 м.
|
Теоретическая механика |
C1.4 |
Теоретическая механика |
300₽ |
|
|
11092 |
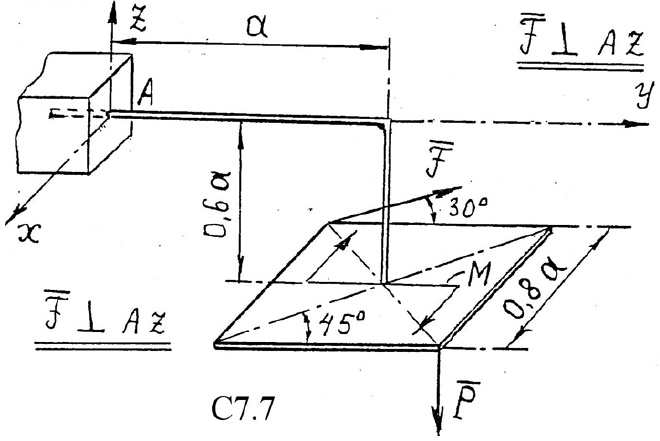
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунке.
|
Теоретическая механика |
C7.7 |
Теоретическая механика 2 |
300₽ |
|
|
12330 |
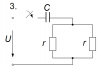
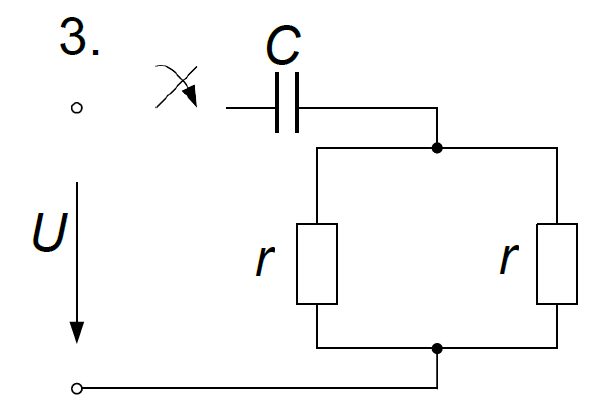
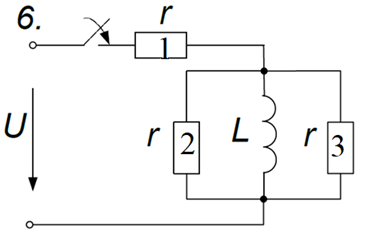
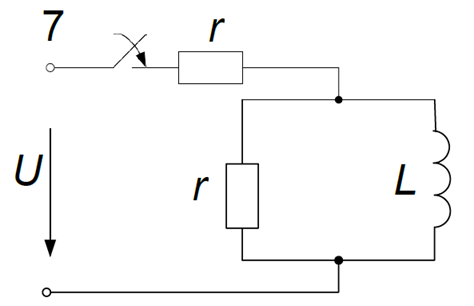
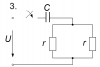
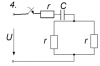
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 2 |
250 |
- |
120 |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
123 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
11172 |

ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ОДНОРОДНОГО ТЕЛА
Найти положение центра тяжести плоской фермы, пластинки и объемного тела. Ферма состоит из однородных стержней; пластинка имеет малую постоянную толщину. Схемы тел показаны на рис. C9.7. Размеры ферм даны в метрах, остальных тел - в сантиметрах.
|
Теоретическая механика |
C9.7 |
Теоретическая механика 2 |
300₽ |
|
|
12410 |
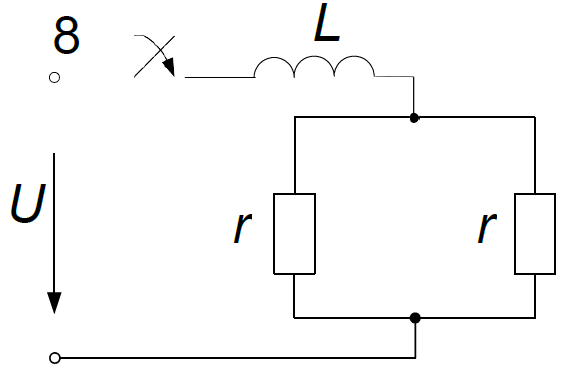
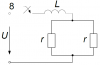
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 8 |
20 |
80 |
- |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
186 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
11586 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у=у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 4.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| 5 |
7t2 - 3 |
5t |
1/4 |
|
Теоретическая механика |
5 |
|
300₽ |
|
|
8388 |

ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
На рис. К3.18 показана схема механизма, причем
О1А = L1 = 0,4 м;
АВ = L2 = 1,4 м;
ДE = L3 = 1,2 м;
O2В = L4 = 0,6 м;
АД = ДВ.
Ползун в данном положении механизма имеет скорость VB = 4 м/с и ускорение aB = 6 м/с2. Для заданного положения механизма построить мгновенные центры скоростей шатунов АВ и ДЕ, найти скорости точек А, Д, Е, угловые скорости указанных шатунов и кривошипа О1А, а также ускорение точки А.
|
Теоретическая механика |
K5.17 |
Теоретическая механика 2 |
300₽ |
|
|
8488 |

ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. С2.5, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С2.5_1 |
4 |
3.2 |
3 |
2.5 |
4 |
2.8 |
30° |
|
Теоретическая механика |
C2.5_1 |
Теоретическая механика |
300₽ |
|
|
10948 |

ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. C4.17, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| C4.17 |
4 |
3.6 |
4 |
1.0 |
2.2 |
1.2 |
60° |
|
Теоретическая механика |
C4.17 |
Теоретическая механика 2 |
300₽ |
|
|
9754 |

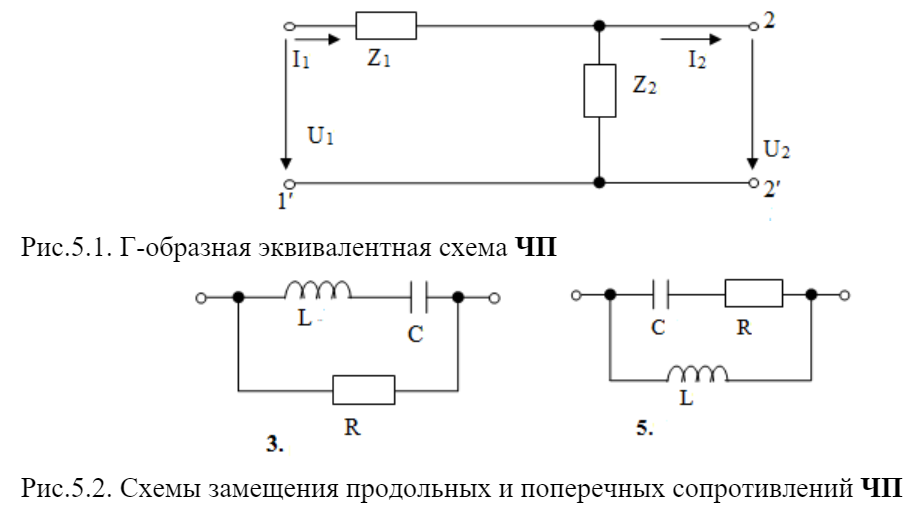
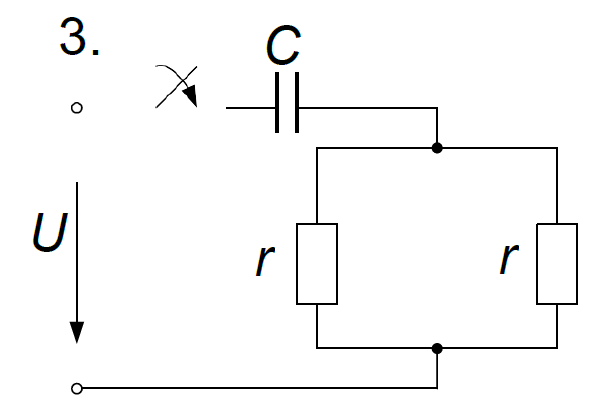
ЗАДАНИЕ № 3 «РАСЧЕТ ЧЕТЫРЁХПОЛЮСНИКА»
На рис. 5.1 представлена Г-образная эквивалентная схема четырёхполюсника (ЧП), где Z1 – продольное сопротивление, Z2 – поперечное сопротивление.
Выполнить следующее:
1) начертить исходную схему ЧП;
2) свести полученную схему ЧП к Г-образной эквивалентной схеме ЧП, заменив трёхэлементные схемы замещения продольного и поперечного сопротивлений двухэлементными схемами: Z1 = R1 + jX1, Z2 = R2 + jX2. Дальнейший расчёт вести для эквивалентной схемы;
3) определить коэффициенты A – формы записи уравнений ЧП;
4) определить сопротивления холостого хода и короткого замыкания со стороны первичных (11’) и вторичных выводов (22’):
а) через A – параметры;
б) непосредственно через продольное и поперечное сопротивления для режимов холостого хода и короткого замыкания на соответствующих выводах;
5) определить характеристические сопротивления для выводов 11’ и 22’ и постоянную передачи ЧП;
6) определить комплексный коэффициент передачи по напряжению и передаточную функцию ЧП;
Таблица 5.1. Параметры элементов продольного и поперечного сопротивлений ЧП
| Номер строки |
R, Ом |
L, мГ |
C, мкФ |
f0, кГц |
| 2 |
30 |
5 |
5 |
30 |
|
Электротехника |
235.3 |
|
300₽ |
|
|
11028 |
ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. C5.15 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| C5.15 |
2, 11, 4 |
6, 7 |
90 |
140 |
|
Теоретическая механика |
C5.15 |
Теоретическая механика 2 |
300₽ |
|
|
11108 |

ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунке.
|
Теоретическая механика |
C7.15 |
Теоретическая механика 2 |
300₽ |
|
|
12346 |
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 3 |
20 |
- |
40 |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
133 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
11188 |
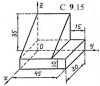
ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ОДНОРОДНОГО ТЕЛА
Найти положение центра тяжести плоской фермы, пластинки и объемного тела. Ферма состоит из однородных стержней; пластинка имеет малую постоянную толщину. Схемы тел показаны на рис. C9.15. Размеры ферм даны в метрах, остальных тел - в сантиметрах.
|
Теоретическая механика |
C9.15 |
Теоретическая механика 2 |
300₽ |
|
|
3285 |
 ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Угловая скорость винта совершившего посадку самолета, равная в данный момент ω0 = 80π с-1, через t1 = 10 секунд после выключения мотора становится равной ω = 40π с-1. Считая вращение винта равнозамедленным, определить скорость и ускорение точки винта в момент t2 = 12 с, если расстояние до этой точки от оси вращения равно 1,5 м.
|
Теоретическая механика |
K4.7 |
Теоретическая механика 2 |
300₽ |
|
|
12426 |
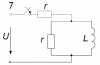
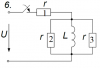
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 6 |
10 |
20 |
- |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
167 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
8406 |

ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. С3.2 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| С3.2 |
1, 7, 5 |
2, 3 |
80 |
50 |
|
Теоретическая механика |
C3.2_1 |
Теоретическая механика |
300₽ |
|
|
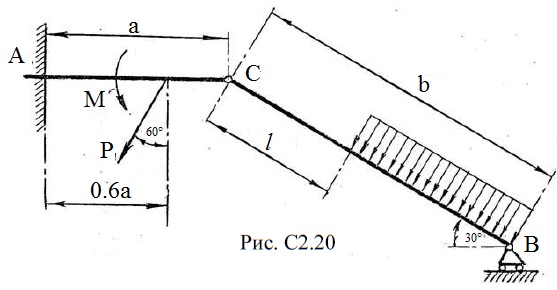
8504 |

ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. С2.20, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С2.20 |
2 |
3 |
3 |
1.8 |
2.5 |
1.0 |
60° |
|
Теоретическая механика |
C2.20_1 |
Теоретическая механика |
300₽ |
|
|
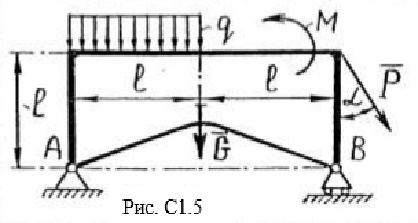
10964 |
СОСТАВЛЕНИЕ РАСЧЕТНОЙ СХЕМЫ ПЛОСКОЙ КОНСТРУКЦИИ
Используя принцип освобождаемости от связей, освободить плоскую конструкцию от связей и приложить к ней реакции связей. Равномерно-распределенную нагрузку заменить соответствующей равнодействующей силой. Силы, не параллельные осям координат, разложить на составляющие, параллельные осям координат. Построить расчетную схему конструкции. Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. C1.5, исходные данные приведены в табл. 1.
| Номер варианта |
Р, кН |
G, кН |
M, кН∙м |
q, кН∙м |
l, м |
α, град |
| C1.5 |
10 |
8 |
5 |
2 |
2 |
30° |
|
Теоретическая механика |
C1.5 |
Теоретическая механика 2 |
300₽ |
|
|
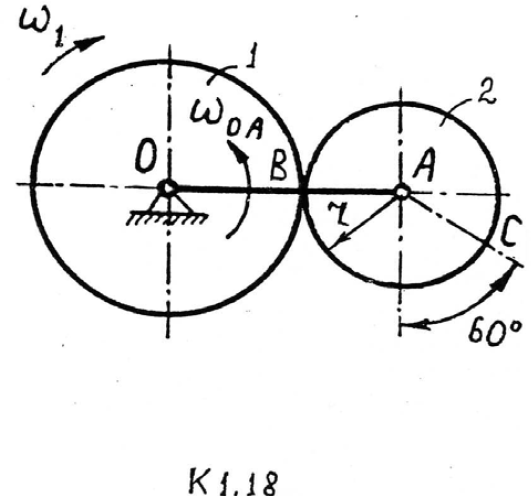
8974 |
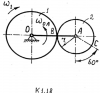
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис.
AB = R + r = 35 см = 0,35 м; r = 15 см =0,15 м; AC = 15 см = 0,15 м; ωOA = 2 c-1; ω1 = 2,5 c-1.
|
Теоретическая механика |
K1.18. |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
6363 |
ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Груз D массой т, получив в точке A начальную скорость движется по изогнутой трубе ABC, расположенной в вертикальной плоскости.
На участке AB трубы на груз, кроме силы тяжести, действует сила сопротивления R, зависящая от скорости v груза D: R=0,1∙v .
В точке B груз, изменив направление приобретенной скорости, но сохранив при этом ее величину, переходит на участок BC трубы, где на него, помимо силы тяжести, действует сила трения скольжения (коэффициент трения груза о трубу f = 0,2) и переменная по величине сила F = 3∙sin(π∙t), направленная вдоль участка BC. Проекция Fx последней силы на ось Bx задается.
Считая груз D материальной точкой, и зная расстояние AB или время t, движения груза от точки A до точки B, найти уравнение х = х(t) движения груза на участке BC.
Варианты расчетных схем изображены на рис. 2.1. Варианты числовых значений параметров приведены в таблице.
| Номер варианта |
№ Дано |
m, кг |
v0, м/с |
µ, Н∙с/м |
n |
F, Н |
α, град |
t, сек |
| 27 |
1 |
5 |
2 |
0,1 |
1 |
3∙sin(πt) |
30 |
3 |
|
Теоретическая механика |
|
|
300₽ |
|
|
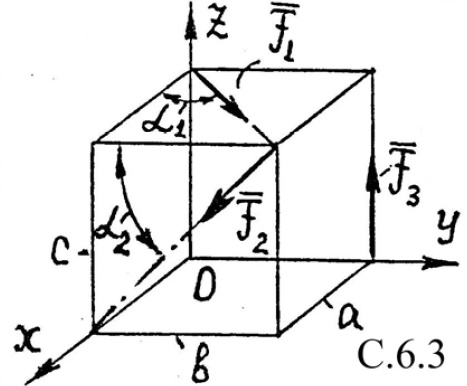
11044 |
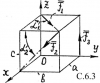
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C6.3 |
Теоретическая механика 2 |
300₽ |
|
|
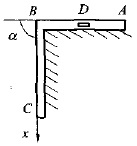
11124 |
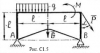
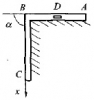
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
Расчетные схемы даны на рис. С8.3. Определить наименьший вес Qmin груза A, при котором возможно равновесие однородной балки ВС весом P. Коэффициент трения между балкой BC и втулкой B равен f; трение во втулке C не учитывать. Угол наклона балки к горизонту равен α; BD = DC.
|
Теоретическая механика |
C8.3 |
Теоретическая механика 2 |
300₽ |
|
|
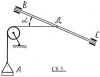
14300 |

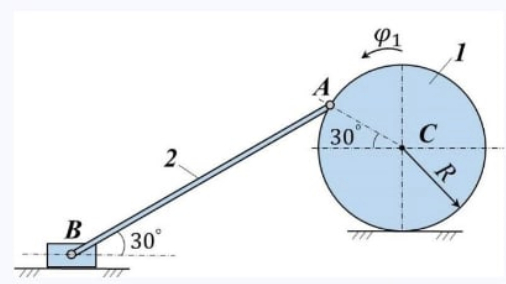
Для заданного механизма дано: R = 0,3 м, АВ = 1 м, $\varphi_1(t)=\frac{\sqrt{3}}{6}(2t-t^2)+t$ рад.
Колесо катится без проскальзывания. Полагая, что в этот момент времени механизм занимает положение, указанное на рисунке, определить:
1) модуль скорости точки А;
2) модуль скорости точки B;
3) модуль угловой скорости звена AB;
4) направление вращения звена АB.
|
Теоретическая механика |
Д7.21 |
Теоретическая механика 2 |
300₽ |
|
|
12362 |
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 8 |
20 |
- |
35 |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
184 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
11204 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.3 |
6t2 - 3 |
3t |
1 |
|
Теоретическая механика |
K1.3 |
Теоретическая механика 2 |
300₽ |
|
|
8338 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.5 -исходные данные приведены в таблице 2.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С-2.5 |
6 |
5 |
6 |
0,8 |
1 |
- |
60° |
|
Теоретическая механика |
С-2.5 |
Теоретическая механика |
300₽ |
|
|
12442 |
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 3 |
20 |
250 |
- |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
138 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
10500 |
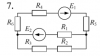
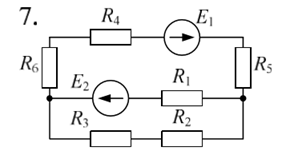
Расчет разветвленной линейной электрической цепи постоянного тока с несколькими источниками электрической энергии.
Для электрической цепи, вариант которой соответствует последней цифре учебного шифра студента и изображенной на рис. 2, выполнить следующее:
1. Составить уравнения для определения токов путем непосредственного применения законов Кирхгофа (указав, для каких узлов и контуров эти уравнения записаны). Решать эту систему уравнений не следует.
2. Определить токи в ветвях методом контурных токов.
3. Определить режимы работы активных элементов и составить баланс мощностей.
Значения ЭДС источников и сопротивлений приемников приведены в табл. 2.
| Предпоследняя цифра учебного шифра студента |
E1, В |
E2, В |
R1, Ом |
R2, Ом |
R3, Ом |
R4, Ом |
R5, Ом |
R6, Ом |
| 2 |
70 |
190 |
17 |
12 |
8 |
13 |
17 |
10 |
|
Электротехника |
227 |
МИИТ. Общая электротехника и электроника. 2016 год |
300₽ |
|
|
14470 |
Дана плотность распределения случайного вектора
$$f(x,y)=\left\{\begin{array}{ll}
C(x+2xy+2y^2), & x, y \in [0,1] \\
0, & x, y \notin [0, 1]
\end{array} \right. $$
Найти константу С и вероятность того, что случайный вектор (X, Y) принадлежит треугольнику с вершинами в точках (0, 0), (1, 2), (0, 1). Являются ли X и Y зависимыми величинами? Найти координаты центра рассеивания и функцию распределения.
|
Теория вероятностей |
|
|
300₽ |
|
|
8422 |

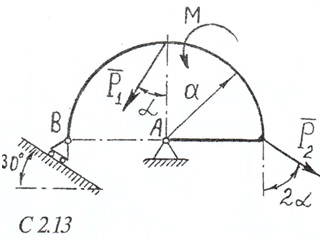
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.13, -исходные данные приведены в таблице 2.
Таблица 2
| Номер варианта |
Р, кН |
М, кН∙м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С-2.13 |
12 |
10 |
6 |
1 |
- |
- |
30° |
|
Теоретическая механика |
C2.13 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
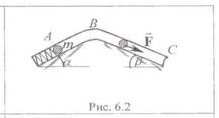
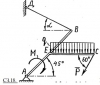
18265 |

Шарик массы m движется из положения A внутри изогнутой трубки, расположенной в вертикальной плоскости. Шарик, пройдя путь l0, отделяется oт пружины. В точке B шарик, не меняя значения своей скорости, переходит на участок BC, где на него дополнительно действует переменная сила F, направление которой указано на рисунке. Пользуясь общими теоремами динамики точки, определить скорость шарика в положениях B и C. В задании принята следующие обозначения: vA - начальная скорость шарика, AB - длина участка, τ - время движения на участке BC, f - коэффициент трения скольжения шарика по стенке трубки, c - коэффициент жесткости пружины.
| № |
Рис. |
m |
vA |
f |
AB |
l0 |
c |
α |
β |
τ |
F(t) |
| 2 |
|
кг |
м/с |
|
м |
см |
Н/см |
град |
с |
Н |
| 6.2 |
0,5 |
3 |
0,1 |
0,3 |
15 |
0,98 |
30 |
45 |
0,5 |
sin 0,3t |
|
Механика |
|
|
300₽ |
|
|
5113 |
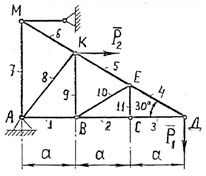
 ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. С3.6 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| С3.15 |
2, 11, 4 |
6, 7 |
90 |
140 |
|
Теоретическая механика |
C3.15_1 |
Теоретическая механика |
300₽ |
|
|
9706 |
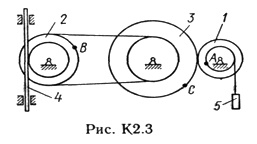
КИНЕМАТИКА
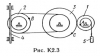
Механизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза S, привязанного к концу нити, намотанной на одно из колес (рис K2.0 — K2 9, табл. K2). Радиусы ступеней колес равны соответственно у колеса 1 — r1 = 2 см, R1 = 4 см, у колеса 2 — r2 = 6 см, R2 = 8 см, у колеса 3 — r3 = 12 см, R3 = 16 см. На ободьях колес расположены точки A, B и C.
| Номер условия |
Дано |
Найти |
| скорости |
ускорения |
| 0 |
S4 = 4(7t - t2) |
vB, vC |
ε2, aA, a5 |
В столбце «Дано» таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где S4(t) — закон движения рейки 4, v4(t) — закон изменения скорости колеса 2, vC(t) — закон изменения скорости колеса 3 и т д (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s4, s5 и v4, v5 — вниз.
Определить в момент времени t1 = 2 с указанные в таблице в столбцах «Найти» скорости (v — линейные, ω — угловые) и ускорения (a — линейные, ε — угловые) соответствующих точек или тел (v5— скорость груза 5 и т.д.).
|
Теоретическая механика |
|
|
300₽ |
|
|
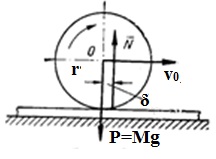
8520 |
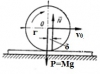
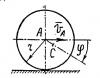
Оси колеса радиусом r, находящемуся на горизонтальной плоскости, сообщили скорость V0. Коэффициент трения качения равен δ. Определить путь, пройденный колесом до остановки. Качение колеса происходит без скольжения. Колесо считать однородным диском.
|
Теоретическая механика |
D4.10 |
Теоретическая механика |
300₽ |
|
|
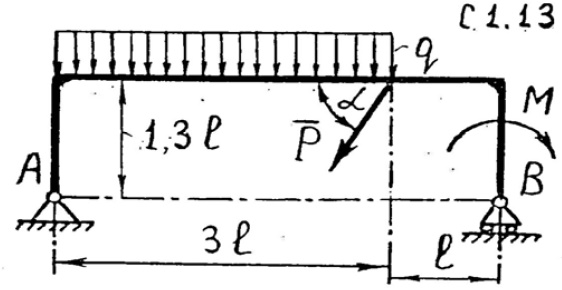
10980 |
СОСТАВЛЕНИЕ РАСЧЕТНОЙ СХЕМЫ ПЛОСКОЙ КОНСТРУКЦИИ
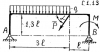
Используя принцип освобождаемости от связей, освободить плоскую конструкцию от связей и приложить к ней реакции связей. Равномерно-распределенную нагрузку заменить соответствующей равнодействующей силой. Силы, не параллельные осям координат, разложить на составляющие, параллельные осям координат. Построить расчетную схему конструкции. Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. C1.13, исходные данные приведены в табл. 1.
| Номер варианта |
Р, кН |
G, кН |
M, кН∙м |
q, кН∙м |
l, м |
α, град |
| C1.13 |
8 |
- |
3 |
6 |
1 |
60° |
|
Теоретическая механика |
C1.13 |
Теоретическая механика 2 |
300₽ |
|