|
14042 |

Для определения момента трения в цапфах на вал насажен маховик массой М, радиус инерции маховика равен р. Маховику сообщена начальная угловая скорость ω0; предоставленный самому себе, он остановился через Т[с] . Определить момент трения, считая его постоянным
|
Теоретическая механика |
Д5.14 |
Теоретическая механика 2 |
300₽ |
|
|
8444 |

ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.5, -исходные данные приведены в таблице 2.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С-2.5 |
6 |
5 |
6 |
0,8 |
1,8 |
- |
60° |
|
Теоретическая механика |
C2.5 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
14806 |
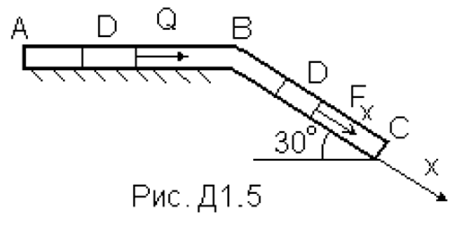
Груз D массой m, получив в точке A начальную скорость v0, движется в изогнутой трубе АВС, расположенной в вертикальной плоскости; участки трубы или оба наклонные, или один горизонтальный, а другой наклонный (рис.3.1, табл. 3.2).
На участке АВ на груз кроме силы тяжести действуют постоянная сила Q (ее направление показано на рисунках).
В точке B груз, не изменяя своей скорости, переходит на участок BC трубы, где на него кроме силы тяжести действует переменная сила F, проекция которой Fx на ось х задана в таблице.
Считая груз материальной точкой и зная время t1 движения груза от точки A до точки B, найти скорость груза на участке BC через t2 = 2 сек. после выхода из точки B. Трением груза о трубу пренебречь.
| Вариант |
m, кг |
v0, м/c |
Q, Н |
t1, с |
Fx, Н |
| 5 |
4,5 |
22 |
9 |
3 |
t3 + 2t |
|
Теоретическая механика |
Д1-5 |
Методичка по термеху. Нижний Новгород. 2019 год |
300₽ |
|
|
8540 |

ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунках С4.5.
|
Теоретическая механика |
C4.5_1 |
Теоретическая механика |
300₽ |
|
|
8626 |
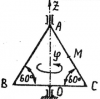
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
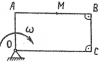
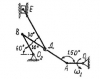
Треугольная пластинка АВС вращается вокруг оси OZ по закону φ = 2t2 рад, а по ее стороне АС движется точка М согласно уравнению АМ = 0,3t2 м (рис. К 2.14). Определить абсолютную скорость точки М в момент времени t1 = 1 c.
|
Теоретическая механика |
K7.4 |
Теоретическая механика 2 |
300₽ |
|
|
11204 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.3 |
6t2 - 3 |
3t |
1 |
|
Теоретическая механика |
K1.3 |
Теоретическая механика 2 |
300₽ |
|
|
5112 |
 ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
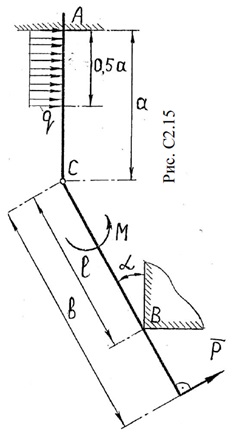
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. С2.15, исходные данные указаны в таблице.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С2.15 |
5 |
3,6 |
3 |
2,3 |
4,0 |
1,8 |
30° |
|
Теоретическая механика |
C2.15_1 |
Теоретическая механика |
300₽ |
|
|
12484 |
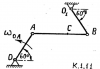
Для заданного механизма найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки.
OA = 25 см = 0,25 м; AB = 40 см = 0,40 м; AC = 25 см = 0,25 м; ωOA = 3 c-1.
|
Теоретическая механика |
K6.6 |
Теоретическая механика 2 |
300₽ |
|
|
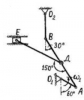
6489 |

По заданным уравнениям относительного движения точки S = S(t) по переносящему телу и угловой скорости ω = ω(t) этого тела приведенным в табл. 2, найти абсолютную скорость и абсолютное ускорение точки М в момент времени t1. Варианты расчетных схем изображены на рис. 3.1.
| Номер варианта |
№ Дано |
ω(t), рад/с |
S(t), см |
R, см |
a, см |
t, сек |
| 20 |
4 |
π-2∙t |
10∙sin(π∙t/4)) |
- |
- |
1 |
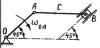
Точка M пластины движется по диагонали прямоугольной пластины, которая вращается вокруг стороны квадрата AB с угловой скоростью ω = π-2∙t (рад/с). Точка М двигается согласно уравнению AM = S(t) = 10∙π∙sin(π∙t/4) (см). Определить абсолютные скорость и ускорение точки в момент времени t1 = 1 (с).
|
Теоретическая механика |
|
|
300₽ |
|
|
8390 |
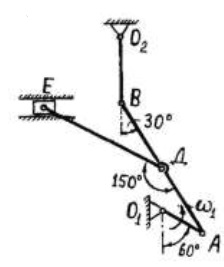
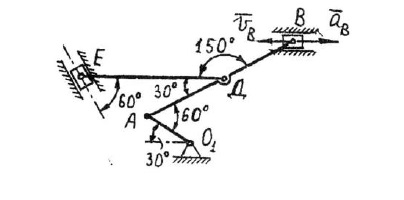
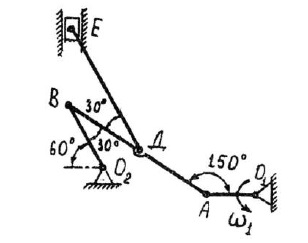
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
На рис. К3.2 показана схема механизма, причем
О1А = L1 = 0,4 м;
АВ = L2 = 1,4 м;
ДE = L3 = 1,2 м;
O2В = L4 = 0,6 м;
АД = ДВ.
Кривошип O1А вращается вокруг оси O1 с постоянной угловой скоростью ω1 = ωO1A = 4 с-1. Для заданного положения механизма построить мгновенные центры скоростей шатунов АВ и ДЕ, найти скорости точек A, B, Д, Е, угловые скорости указанных шатунов и кривошипа О2В, а также ускорение точки В.
|
Теоретическая механика |
K5.2 |
Теоретическая механика 2 |
300₽ |
|
|
8472 |
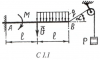
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. С 1.11, исходные данные приведены в табл. 1.
| Номер варианта |
P, кН |
G, кН |
M, кНм |
q, кН/м |
l, м |
α, град |
| C1.11 |
10 |
8 |
6 |
2 |
2 |
30° |
|
Теоретическая механика |
C1.1 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
8556 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = x(t), у = y(t). найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 4.
| Номер варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| K1.1 |
5t |
2 - 5t2 |
1 |
|
Теоретическая механика |
K1.1_1 |
Теоретическая механика |
300₽ |
|
|
11140 |
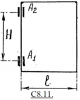
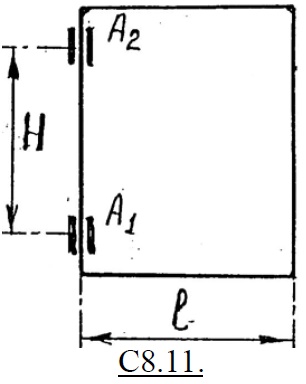
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
Расчетные схемы даны на рис. С8.11. Однородная горизонтальная рама, состоящая из четырех однородных стержней, удерживается в вертикальном положении силами трения во втулках A1 и А2. Коэффициент трения в этих втулках соответственно равны f1 и f2. Определить наибольшее расстояние Н между втулками, если длина горизонтального стержня равна l.
|
Теоретическая механика |
C8.11 |
Теоретическая механика 2 |
300₽ |
|
|
5060 |
 ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
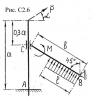
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. С2.6, исходные данные указаны в таблице.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С2.6 |
2 |
2 |
1 |
1,8 |
2,5 |
0,8 |
60° |
|
Теоретическая механика |
C2.6_1 |
Теоретическая механика |
300₽ |
|
|
8642 |
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По стороне AB прямоугольной пластины, вращающейся в плоскости чертежа, движется точка M по закону, AM= 3sin(πt/6). В момент времени t1 =1с угловая скорость пластины со = 3 с-1 Определить абсолютную скорость этой точки в этот момент, расстояние OA=1 м
|
Теоретическая механика |
K7.20 |
Теоретическая механика 2 |
300₽ |
|
|
11220 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.11 |
3t |
5 - 3t2 |
2 |
|
Теоретическая механика |
K1.11 |
Теоретическая механика 2 |
300₽ |
|
|
8936 |
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
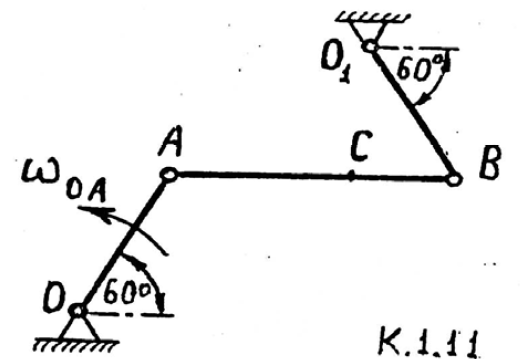
Для заданного положения механизма найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис. K14.l.
OA = 30 см = 0,30 м; AB = 40 см = 0,40 м; AC = 15 см = 0,15 м; ωOA = 4 c-1.
|
Теоретическая механика |
K6.14 |
Теоретическая механика 2 |
300₽ |
|
|
13814 |
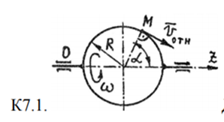
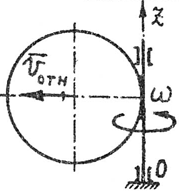
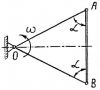
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
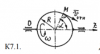
Диск радиуса R = 0,3 м вращается вокруг оси 0Z с угловой скоростью ω = 2 с-1. По его ободу движется точка с постоянной скоростью Vотн = 0,3 м/с. Определить абсолютную скорость точки в указанном положении, если угол α = 60°.
|
Теоретическая механика |
K7.1 |
Теоретическая механика 2 |
300₽ |
|
|
8240 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. C1.12, исходные данные приведены в табл. 1.
| Номер варианта |
P, кН |
G, кН |
M, кНм |
q, кН/м |
l, м |
α, град |
| C1.12 |
10 |
6 |
5 |
2 |
1.5 |
45° |
|
Теоретическая механика |
C1.12 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
14106 |

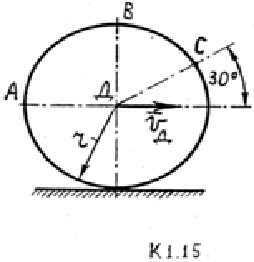
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис.
AB = 10 см; r = 15 см; R = 25 см; vД = 100 см/с.
|
Теоретическая механика |
K1.15 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
8408 |

ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. С3.14 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| С3.14 |
2,9,4 |
1,6 |
80 |
100 |
|
Теоретическая механика |
C3.14_1 |
Теоретическая механика |
300₽ |
|
|
8490 |
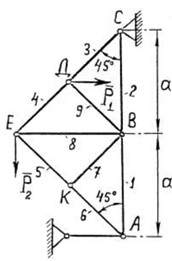
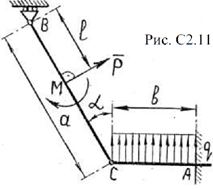
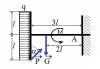
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. С2.11, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С2.11 |
8 |
4 |
2.4 |
1.8 |
2.5 |
0.8 |
30° |
|
Теоретическая механика |
C2.11_1 |
Теоретическая механика |
300₽ |
|
|
8574 |
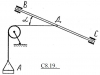
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = x(t), у = y(t). найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 4.
| Номер варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| K1.19 |
2∙sin(πt/6)-3 |
3∙cos(πt/6) |
2 |
|
Теоретическая механика |
K1.19_1 |
Теоретическая механика |
300₽ |
|
|
11156 |
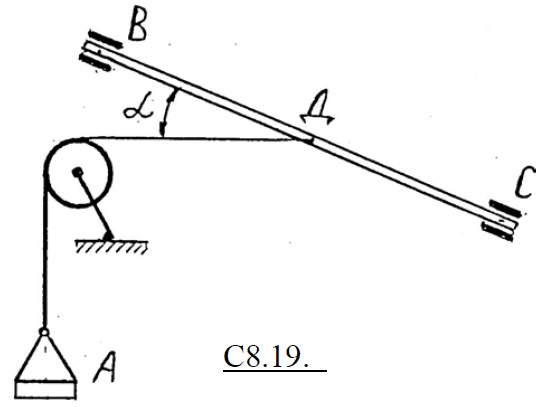
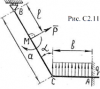
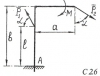
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
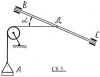
Расчетные схемы даны на рис. С8.19. Определить наибольший вес Qmax груза A, при котором возможно равновесие однородной балки ВС весом P. Коэффициент трения между балкой BC и втулкой B равен f; трение во втулке C не учитывать. Угол наклона балки к горизонту равен α; BD=DC.
|
Теоретическая механика |
C8.19 |
Теоретическая механика 2 |
300₽ |
|
|
5069 |
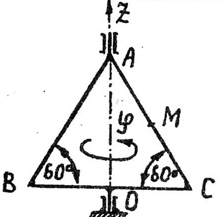
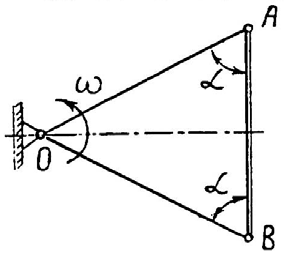
ПРИНЦИП ДАЛАМБЕРА
Тонкий однородный стержень АВ массой m, расположенный в горизонтальной плоскости, вращается с постоянной угловой скоростью ω вокруг вертикальной оси О, с которой он скреплен одинаковыми невесомыми стержнями ОА и ОВ длиной l. Определить реакции этих стержней
|
Теоретическая механика |
Д6.6 |
Теоретическая механика 2 |
300₽ |
|
|
8666 |
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
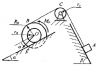
Барабан массой m и радиусом r приводится во вращательное движение из состояния покоя моментом M. Определить ускорение поднимаемого с помощью троса груза массой m1. Барабан считать однородным цилиндром, массой троса пренебречь.
|
Теоретическая механика |
Д3.3 |
Теоретическая механика 2 |
300₽ |
|
|
11236 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.19 |
2sin(πt/6) - 3 |
3cos(πt/6) |
2 |
|
Теоретическая механика |
K1.19 |
Теоретическая механика 2 |
300₽ |
|
|
5129 |
 ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
На рис. К3.18 показана схема механизма, причем
О1А = L1 = 0,4 м;
АВ = L2 = 1,4 м;
ДE = L3 = 1,2 м;
O2В = L4 = 0,6 м;
АД = ДВ.
Ползун в данном положении механизма имеет скорость VB = 4 м/с и ускорение aB = 6 м/с2. Для заданного положения механизма построить мгновенные центры скоростей шатунов АВ и ДЕ, найти скорости точек А, Д, Е, угловые скорости указанных шатунов и кривошипа О1А, а также ускорение точки А.
|
Теоретическая механика |
K5.18 |
Теоретическая механика 2 |
300₽ |
|
|
16842 |
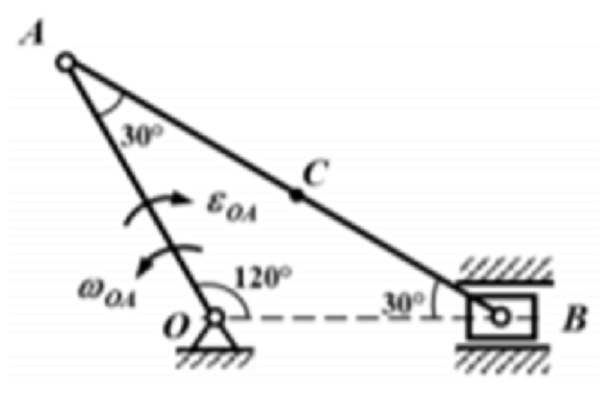
Для заданного положения звеньев механизма определить скорости и ускорения точек В и С.
εOA = 2 рад/с2, ωОA = 3 рад/с, OA = 20 см, AC = CB.
|
Теоретическая механика |
|
|
300₽ |
|
|
9020 |
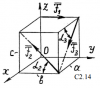
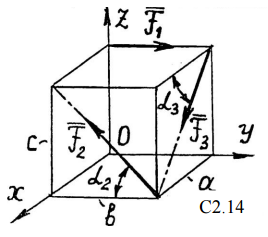
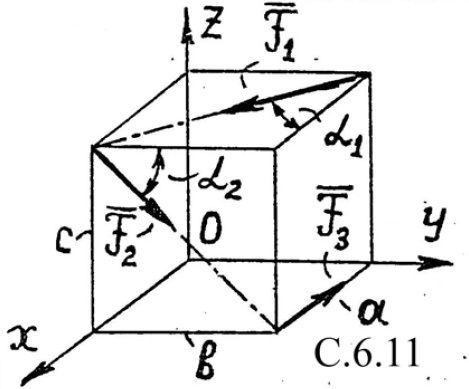
ОПРЕДЕЛЕНИЕ ХАРАКТЕРИСТИК ДЕЙСТВИЯ ПРОСТРАНСТВЕННОЙ СИСТЕМЫ СИЛ
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C2.14. |
Теоретическая механика |
300₽ |
|
|
13964 |

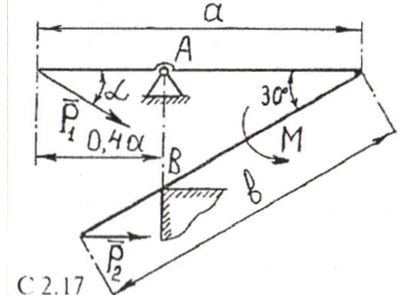
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.17 -исходные данные приведены в таблице 2.
| № варианта |
P1, кН |
P2, кН |
M, кН∙м |
a, м |
b, м |
α, град |
| C2,17 |
9 |
5 |
6 |
1,6 |
1,6 |
30° |
|
Теоретическая механика |
С2-17 |
Теоретическая механика |
300₽ |
|
|
8340 |
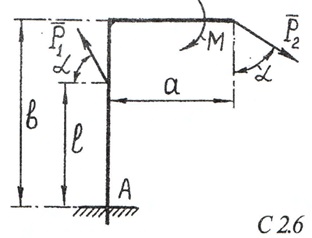
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.6 -исходные данные приведены в таблице 2.
Таблица 2
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С2.6 |
4 |
5 |
3 |
1,2 |
1,8 |
1.2 |
60° |
|
Теоретическая механика |
C2.6 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
8506 |
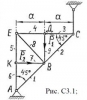
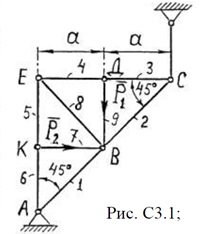
ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. С3.1 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| С3.1 |
2, 9, 4 |
1, 6 |
90 |
40 |
|
Теоретическая механика |
C3.1 |
Теоретическая механика |
300₽ |
|
|
3282 |
 ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы (рис. С3.1 – С3.20) соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| С3.7 |
1, 9, 3 |
4,5 |
150 |
120 |
В точке А заменить подвижный шарнир на НЕ ПОДВИЖНЫЙ.
|
Теоретическая механика |
C3.7_1 |
Теоретическая механика |
300₽ |
|
|
8594 |
ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Тело вращается вокруг неподвижной оси по закону φ = π(t3 + 4t), где φ задан в радианах, а время t - в секундах. В момент времени t1 = 4 с найти угловую скорость и угловое ускорение тела, линейную скорость и ускорение точки тела, отстоящей на 0,2 м от оси вращения, а также число оборотов, которое совершило тело.
|
Теоретическая механика |
K4.16 |
Теоретическая механика 2 |
300₽ |
|
|
11172 |

ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ОДНОРОДНОГО ТЕЛА
Найти положение центра тяжести плоской фермы, пластинки и объемного тела. Ферма состоит из однородных стержней; пластинка имеет малую постоянную толщину. Схемы тел показаны на рис. C9.7. Размеры ферм даны в метрах, остальных тел - в сантиметрах.
|
Теоретическая механика |
C9.7 |
Теоретическая механика 2 |
300₽ |
|
|
5093 |
 ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
На рис. К3.9 показана схема механизма, причем
О1А = L1 = 0,4 м;
АВ = L2 = 1,4 м;
ДE = L3 = 1,2 м;
O2В = L4 = 0,6 м;
АД = ДВ.
Кривошип O1А вращается вокруг оси O1 с постоянной угловой скоростью ω1 = ωOA = 4 с-1. Для заданного положения механизма построить мгновенные центры скоростей шатунов АВ и ДЕ, найти скорости точек А, В, Д, Е, угловые скорости указанных шатунов и кривошипа О2В, а также ускорение точки В.
|
Теоретическая механика |
K5.9 |
Теоретическая механика 2 |
300₽ |
|
|
8684 |
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
Пружина имеет в ненапряжённом состоянии длину 20 см. Сила, необходимая для изменения её длины на 0,01 м, равна 1,96 Н. С какой скоростью v вылетит из трубки шарик массой 0,03 кг, если пружина была сжата до длины 0,1 м. Трубка с пружиной расположена горизонтально.
|
Теоретическая механика |
Д3.20 |
Теоретическая механика 2 |
300₽ |
|
|
11260 |
КИНЕМАТИКА ТОЧКИ
Точка М движется по окружности радиуса R согласно уравнению S = S(t). Определить и построить для момента времени t1 скорость, касательное, нормальное и полное ускорение этой точки. Исходные данные для расчета приведены в табл. 2.
| № варианта |
S = S(t), cм |
R, см |
Время t1, c |
| К2.11 |
3t |
5 - 3t2 |
2 |
|
Теоретическая механика |
K2.11 |
Теоретическая механика 2 |
300₽ |
|
|
6353 |
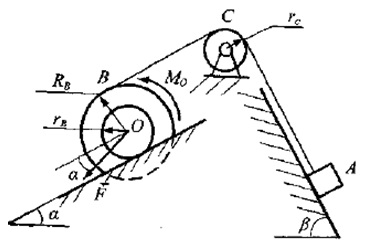
Рассматривается движение механической системы, изображенной на рисунке. Даны следующие значения параметров:
mA = 10 кг; mB = 20 кг; mC = 8 кг; F = 60 Н; M0 = 80 Н∙м; RB = 0,8 м; rB = 0,5 м; rC = 0,2 м, α = 30°; β = 60°; f = 0,1; k = 0,04 м; SA = 2 м; g = 9,8 м/с2.
Определить скорость vA и ускорение aA тела A.
|
Теоретическая механика |
|
|
300₽ |
|
|
9704 |
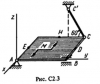
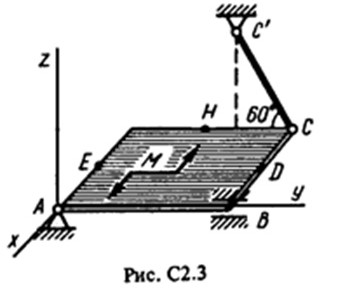
Однородная прямоугольная плита весом P = 5 кН со сторонами AB = 3l = 2,4 м, BC = 2l = 2∙0,8 = 1,6 м закреплена в точке A сферическим шарниром, а в точке B цилиндрическим шарниром (подшипником) и удерживается в равновесии невесомым стержнем СС’ (рис. C2.4)
|
Теоретическая механика |
|
|
300₽ |
|
|
8356 |
ОПРЕДЕЛЕНИЕ СИЛ ПО ЗАДАННОМУ ДВИЖЕНИЮ МАТЕРИАЛЬНОЙ ТОЧКИ
Груз, привязанный к нити длиной l = 0,5 м, движется по окружности в вертикальной плоскости. Какую минимальную скорость в наивысшем положении должен иметь груз, чтобы нить оставалась натянутой.
|
Теоретическая механика |
Д1.2 |
Теоретическая механика 2 |
300₽ |
|
|
10964 |
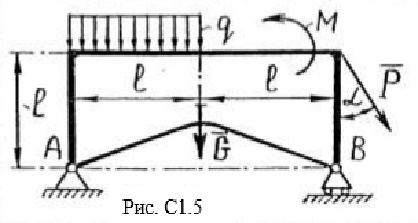
СОСТАВЛЕНИЕ РАСЧЕТНОЙ СХЕМЫ ПЛОСКОЙ КОНСТРУКЦИИ
Используя принцип освобождаемости от связей, освободить плоскую конструкцию от связей и приложить к ней реакции связей. Равномерно-распределенную нагрузку заменить соответствующей равнодействующей силой. Силы, не параллельные осям координат, разложить на составляющие, параллельные осям координат. Построить расчетную схему конструкции. Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. C1.5, исходные данные приведены в табл. 1.
| Номер варианта |
Р, кН |
G, кН |
M, кН∙м |
q, кН∙м |
l, м |
α, град |
| C1.5 |
10 |
8 |
5 |
2 |
2 |
30° |
|
Теоретическая механика |
C1.5 |
Теоретическая механика 2 |
300₽ |
|
|
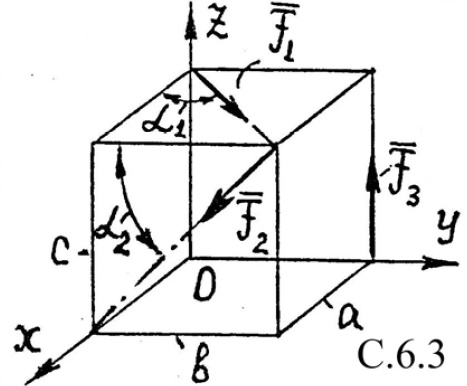
11044 |
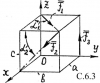
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C6.3 |
Теоретическая механика 2 |
300₽ |
|
|
11124 |
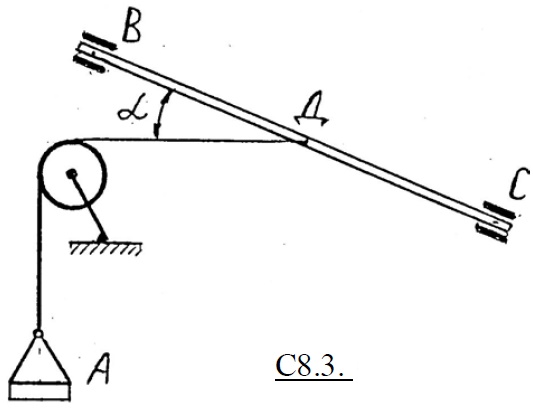
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
Расчетные схемы даны на рис. С8.3. Определить наименьший вес Qmin груза A, при котором возможно равновесие однородной балки ВС весом P. Коэффициент трения между балкой BC и втулкой B равен f; трение во втулке C не учитывать. Угол наклона балки к горизонту равен α; BD = DC.
|
Теоретическая механика |
C8.3 |
Теоретическая механика 2 |
300₽ |
|
|
14620 |

СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По диаметру диска, вращающегося вокруг вертикальной оси 0Z с угловой скоростью ω = 3t2 с-1, движется точка М пo закону Sотн = 0,6t2 м с-2. Определить абсолютную скорость точки М в момент времени t = 1 с.
|
Теоретическая механика |
K7.16 |
Теоретическая механика 2 |
300₽ |
|
|
10900 |
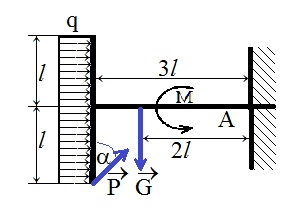
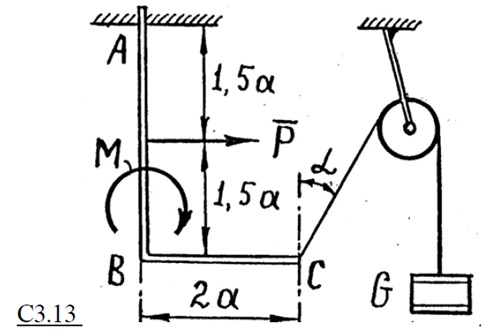
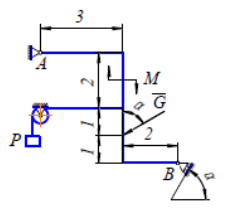
ОПРЕДЕЛЕНИЕ РЕАКЦИИ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
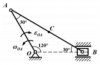
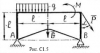
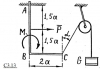
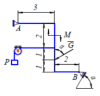
Схемы конструкций построены на рис. СЗ. 1 - С3.20. Кронштейн ABC, весом которого пренебрегаем, испытывает действие груза весом G, пары сил с моментом М и силы P. Определить реакции заделки.
G = 3 кН; Р = 8 кН; М = 14 кН∙м; а = 2 м; α = 30°.
|
Теоретическая механика |
C3.13. |
Теоретическая механика 2 |
300₽ |
|
|
10980 |
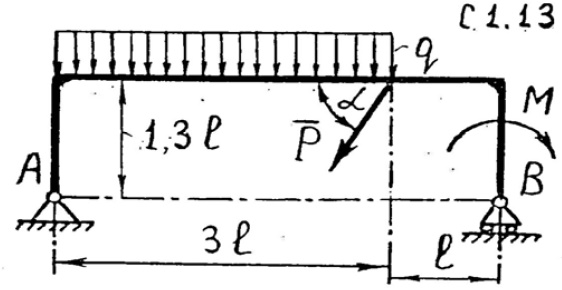
СОСТАВЛЕНИЕ РАСЧЕТНОЙ СХЕМЫ ПЛОСКОЙ КОНСТРУКЦИИ
Используя принцип освобождаемости от связей, освободить плоскую конструкцию от связей и приложить к ней реакции связей. Равномерно-распределенную нагрузку заменить соответствующей равнодействующей силой. Силы, не параллельные осям координат, разложить на составляющие, параллельные осям координат. Построить расчетную схему конструкции. Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. C1.13, исходные данные приведены в табл. 1.
| Номер варианта |
Р, кН |
G, кН |
M, кН∙м |
q, кН∙м |
l, м |
α, град |
| C1.13 |
8 |
- |
3 |
6 |
1 |
60° |
|
Теоретическая механика |
C1.13 |
Теоретическая механика 2 |
300₽ |
|
|
11060 |
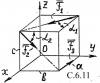
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллелепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C6.11 |
Теоретическая механика 2 |
300₽ |
|
|
10642 |
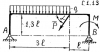
ПЛОСКАЯ ПРОИЗВОЛЬНАЯ СИСТЕМА СИЛ
Определение реакций опор твердого тела
Найти реакции опор конструкции. Размеры (рис.) в схемах конструкций представлены в метрах. Нагрузка указана табл.2.
| Вариант |
G |
P |
M, кН∙м |
q, кН∙м |
α, град |
| кН |
| 2 |
12 |
8 |
10 |
- |
60 |
|
Теоретическая механика |
|
|
300₽ |
|