|
8688 |

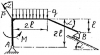
ПРИНЦИП ДАЛАМБЕРА
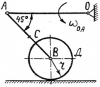
Однородная проволочная полуокружность массой m радиусом R вращается с постоянной угловой скоростью ω вокруг оси ОА (оси Оу). Определить реакции в точках крепления В и D кольца к стержню OA. Расстояние от центра тяжести полукольца до оси ОA: $$x_C=\frac{2R}{3\pi}$$.
|
Теоретическая механика |
Д6.3 |
Теоретическая механика 2 |
300₽ |
|
|
9708 |
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
Прямоугольная пластина (рис. К4.3) вращается вокруг неподвижной оси с постоянной угловой скоростью ω = -3 с-1 заданной в табл. К3 (при знаке минус направление ω противоположно показанному на рисунке).
Ось вращения на рис K4.3 ось вращения OO1 лежит в плоскости пластины (пластина вращается в пространстве)
| № усл |
ω, с-1 |
Рис. 0-5 |
| b, см |
S = AM = f(t) |
| 0 |
-2 |
16 |
60∙(t4 - t2) + 56 |
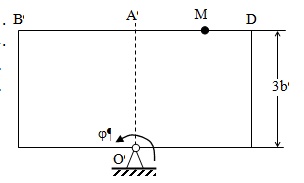
По пластине вдоль прямой BD (рис K4.3) движется точка M. Закон ее относительного движения, выражаемый уравнением $s = AM = 60(t^4 - t^2) + 56$ (s — в сантиметрах, t — в секундах), задан в табл. K4 отдельно для рис. K4.3. На всех рисунках точка M показана в положении, при котором s = AM > 0 (при s > 0 точка М находится по другую сторону от точки А).
Определить абсолютную скорость и абсолютное ускорение точки M в момент времени t1 = 1 с.
|
Теоретическая механика |
|
|
300₽ |
|
|
11206 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.4 |
3cos(πt/3) - 2 |
5sin(πt/3) |
4 |
|
Теоретическая механика |
K1.4 |
Теоретическая механика 2 |
300₽ |
|
|
12486 |
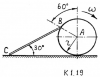
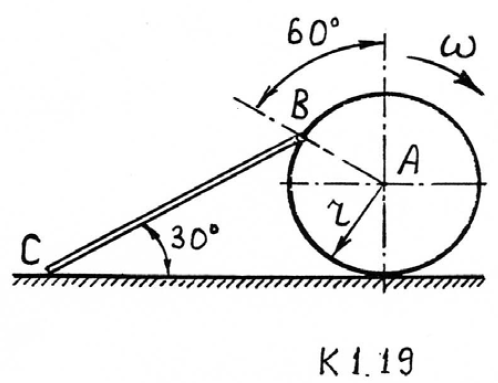
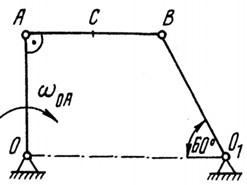
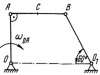
Для заданного механизма найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки.
AB = 15 см; r = 15 см ; ωOA = 4 c-1; ω1 = 3 c-1.
|
Теоретическая механика |
K1.19 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
8528 |

ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
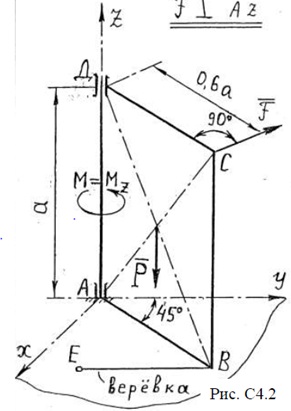
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунках С4.2.
|
Теоретическая механика |
C4.2_1 |
Теоретическая механика |
300₽ |
|
|
8614 |

ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
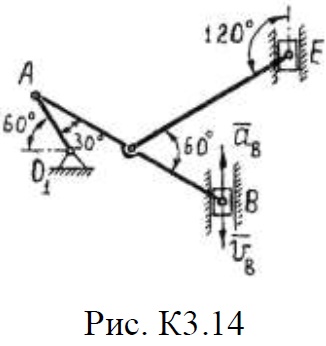
На рис. К3.14 показана схема механизма, причем
О1А = L1 = 0,4 м;
АВ = L2 = 1,4 м;
ДE = L3 = 1,2 м;
O2В = L4 = 0,6 м;
АД = ДВ.
Ползун в данном положении механизма имеет скорость VB = 4 м/с и ускорение aB = 6 м/с2. Для заданного положения механизма построить мгновенные центры скоростей шатунов АВ и ДЕ, найти скорости точек А, Д, Е, угловые скорости указанных шатунов и кривошипа О1А, а также ускорение точки А.
|
Теоретическая механика |
K5.14 |
Теоретическая механика 2 |
300₽ |
|
|
11142 |
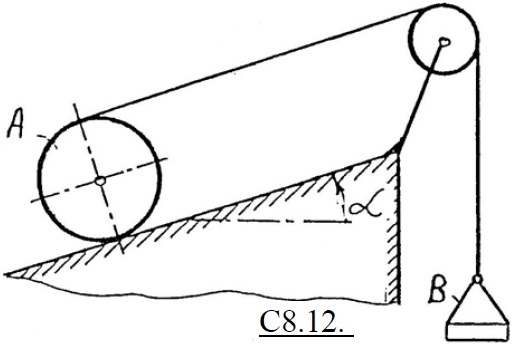
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
Расчетные схемы даны на рис. С8.12. Каток радиуса весом P лежит на наклонной плоскости с утлом α. Определить наименьший вес Qmin груза B, при котором возможно равновесие, если коэффициент трения качения катка равен δ.
|
Теоретическая механика |
C8.12 |
Теоретическая механика 2 |
300₽ |
|
|
11222 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.12 |
2sin(πt/6) - 4 |
3cos(πt/6) |
2 |
|
Теоретическая механика |
K1.12 |
Теоретическая механика 2 |
300₽ |
|
|
8448 |

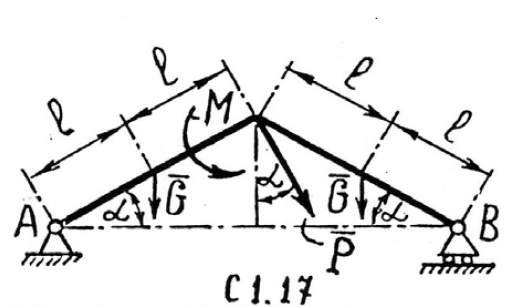
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. С 1.17, исходные данные приведены в табл. 1.
| Номер варианта |
P, кН |
G, кН |
M, кНм |
q, кН/м |
l, м |
α, град |
| C1.17 |
20 |
14 |
4 |
- |
1 |
30° |
|
Теоретическая механика |
C1.17 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
14108 |
ПЛОСКО-ПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
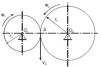
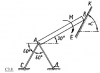
Для заданного положения механизма или колеса найти скорости точек A, B и С, а также угловые скорости звеньев механизма, колес, катящихся без скольжения К 1.20 определить дополнительно угловую скорость колеса и скорость точки Д.
OA = 50 см; AB = 40 см; AC = 20 см; r = 15 см; ωOA = 3 c-1.
|
Теоретическая механика |
K1.20 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
10922 |
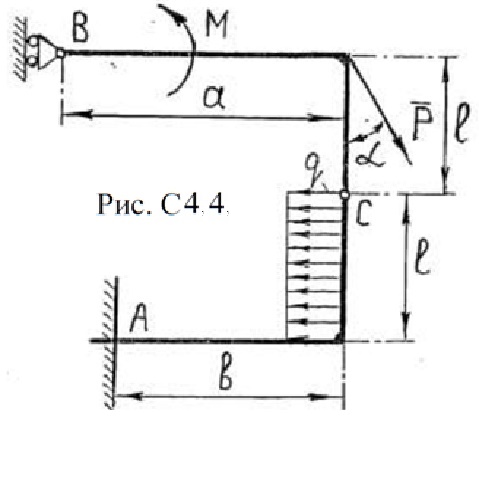
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
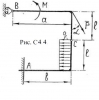
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. C4.4, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| C4.4 |
7 |
5.2 |
4 |
3.2 |
2.7 |
1.6 |
60° |
|
Теоретическая механика |
C4.4 |
Теоретическая механика 2 |
300₽ |
|
|
11002 |

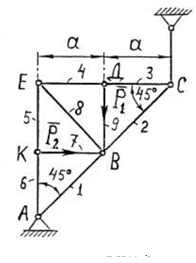
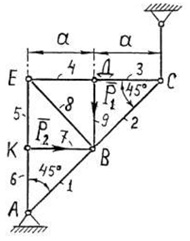
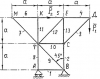
ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. C5.2 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| C5.2 |
1, 7, 5 |
2, 3 |
80 |
50 |
|
Теоретическая механика |
C5.2 |
Теоретическая механика 2 |
300₽ |
|
|
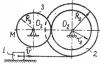
3289 |
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
Чему равна кинетическая энергия зубчатой передачи двух цилиндрических колес числом зубьев z2 = 2∙z1, если их момент инерции относительно осей вращения I2 = 2∙I1 = 6 кгм2, а угловая скорость колеса 1 равна ω1 = 10 рад/с.
|
Теоретическая механика |
Д3.7 |
Теоретическая механика 2 |
300₽ |
|
|
11082 |

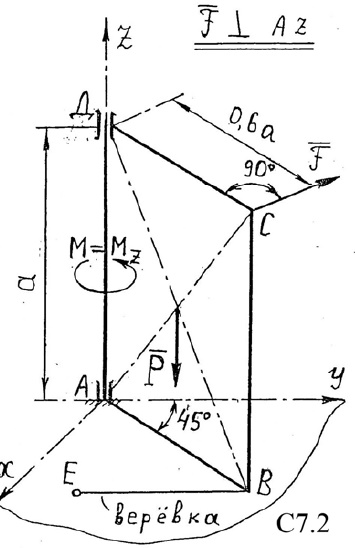
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунке.
|
Теоретическая механика |
C7.2 |
Теоретическая механика 2 |
300₽ |
|
|
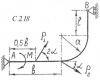
5102 |
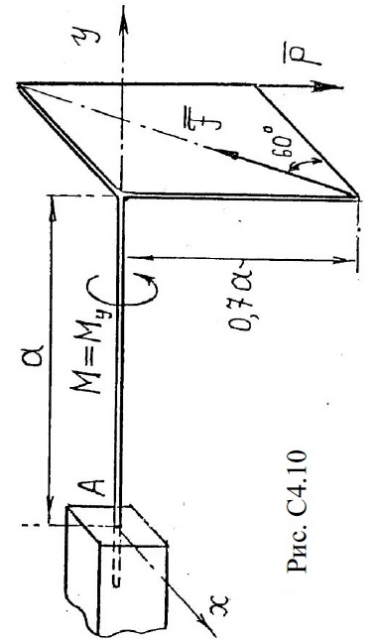
 ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунках С4.10.
|
Теоретическая механика |
C4.10 |
Теоретическая механика |
300₽ |
|
|
14394 |
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА. ДИФФЕРЕНЦИАЛЬНОЕ УРАВНЕНИЕ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ ТВЁРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ОСИ
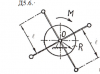
Однородный диск радиусом R и массой т соединен с крестовиной, состоящей из четырех стержней длиной l, массой m каждый. Система начинает вращаться под действием внешних сил с угловой скоростью ω = 3t c-1. Определить момент внешних сил относительно оси вращения О.
|
Теоретическая механика |
Д5.6 |
Теоретическая механика 2 |
300₽ |
|
|
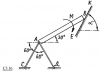
6367 |
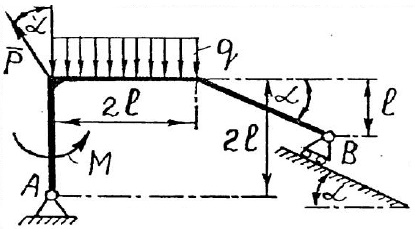
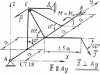
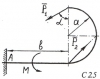
ПРОСТРАНСТВЕННАЯ СИСТЕМА СИЛ
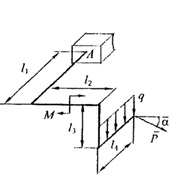
Изогнутая под прямыми углами пространственная рама концом А заделана в неподвижную опору и нагружена равномерно распределенной нагрузкой интенсивностью q или линейное I распределенной нагрузкой с максимальной интенсивностью qmax, парой сил с моментом M и силой P, расположенной в плоскости перпендикулярной участку рамы длиной l4 и образующей угол α с прямой изображенной на рисунке.
Определить опорные реакции рамы.
Варианты расчетных схем изображены па рисунке.
Номер на рисунке соответствует варианту задания. Числовые значения параметров приведены в таблице.
| Номер варианта |
P, Н |
M, Н∙м |
q, Н/м |
l1, м |
l2, м |
l3, м |
l4, м |
α, ° |
| 6 |
700 |
400 |
1000 |
1,6 |
1 |
1,2 |
1,2 |
-30 |
|
Теоретическая механика |
|
|
300₽ |
|
|
14576 |

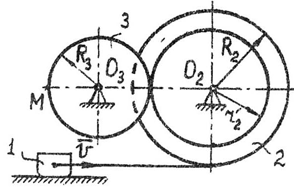
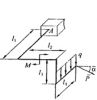
ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
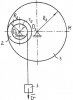
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.9 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.9 |
Теоретическая механика 2 |
300₽ |
|
|
10858 |
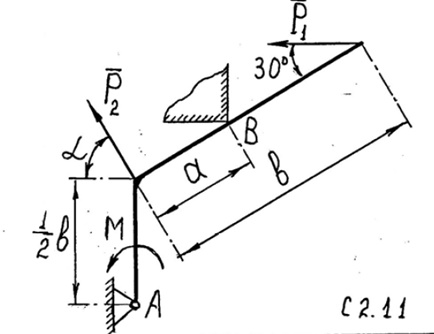
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.11, -исходные данные приведены в таблице 2.
| Номер варианта |
Р1, кН |
P2, кН |
P3, кН |
M кН∙м |
a, м |
b, м |
α, град |
| С-2.11. |
4 |
7 |
0 |
5 |
0.5 |
1.2 |
60° |
|
Теоретическая механика |
C2.11. |
Теоретическая механика 2 |
300₽ |
|
|
10938 |
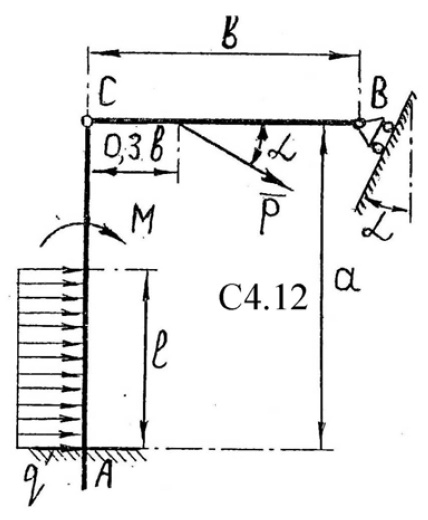
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. C4.12, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| C4.12 |
7 |
4.8 |
2 |
1.5 |
3.0 |
1.3 |
30° |
|
Теоретическая механика |
C4.12 |
Теоретическая механика 2 |
300₽ |
|
|
11018 |
ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. C5.10 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| C5.10 |
7, 11, 5 |
1, 6 |
160 |
100 |
|
Теоретическая механика |
C5.10 |
Теоретическая механика 2 |
300₽ |
|
|
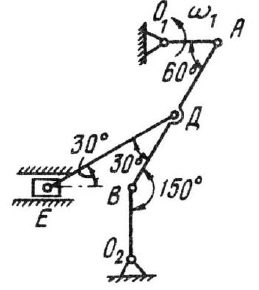
5040 |
 ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
На рис. К3.8 показаны схемы механизмов, причем
О1А = L1 = 0,4 м;
АВ = L2 = 1,4 м;
ДE = L3 = 1,2 м;
02В = L4 = 0,6 м;
АД = ДВ.
Кривошип O1А вращается вокруг оси O1 с постоянной угловой скоростью ω1 = ωOA =4 с-1. Для заданного положения механизма построить мгновенные центры скоростей шатунов АВ и ДЕ, найти скорости точек А, В, Д, Е, угловые скорости указанных шатунов и кривошипа О2В, а также ускорение точки В.
|
Теоретическая механика |
K5.8 |
Теоретическая механика 2 |
300₽ |
|
|
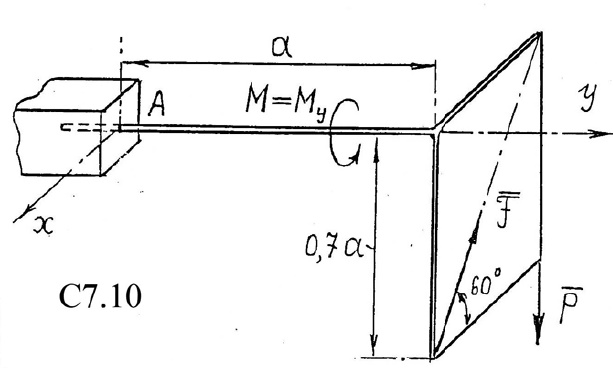
11098 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунке.
|
Теоретическая механика |
C7.10 |
Теоретическая механика 2 |
300₽ |
|
|
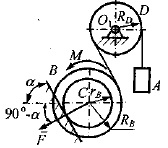
6487 |
ПРИМЕНЕНИЕ ТЕОРЕМЫ ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ К ИЗУЧЕНИЮ ДВИЖЕНИЯ МЕХАНИЧЕСКОЙ СИСТЕМЫ
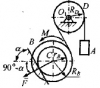
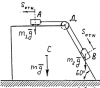
Механическая система, изображенная на рисунке, приводится в движение из состояния покоя. При этом колесо B катится без скольжения по вертикальной плоскости. Массы тел A, B и D (mA, mB, mD), заданная нагрузка F и M, радиус инерции ρB колеса B. Радиусы колеса B и шкива D соответственно равны RB = 0,8 м, RD = 0,2 м, rB = 0,5 м. Угол α имеет значение: α = 30°. Коэффициент трения качения колеса B равен k = 0,05∙RB; коэффициент трения скольжения тела B равен f = 0,1. Используя теорему об изменении кинетической энергии системы, определить скорость и ускорение тела A после того, как оно переместится на расстояние SA = 2 м. Шкив D считать однородным сплошным диском; силами сопротивления в подшипниках, массой троса, его растяжением и проскальзыванием по ободу шкива пренебречь.
| Номер варианта |
№ Дано |
mA, кг |
mB, кг |
mD, кг |
M, Н∙м |
F, Н |
ρB, см |
| 20 |
4 |
8 |
50 |
10 |
10 |
400 |
0.4 |
|
Теоретическая механика |
|
|
300₽ |
|
|
14592 |
ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.17 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.17 |
Теоретическая механика 2 |
300₽ |
|
|
8388 |

ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
На рис. К3.18 показана схема механизма, причем
О1А = L1 = 0,4 м;
АВ = L2 = 1,4 м;
ДE = L3 = 1,2 м;
O2В = L4 = 0,6 м;
АД = ДВ.
Ползун в данном положении механизма имеет скорость VB = 4 м/с и ускорение aB = 6 м/с2. Для заданного положения механизма построить мгновенные центры скоростей шатунов АВ и ДЕ, найти скорости точек А, Д, Е, угловые скорости указанных шатунов и кривошипа О1А, а также ускорение точки А.
|
Теоретическая механика |
K5.17 |
Теоретическая механика 2 |
300₽ |
|
|
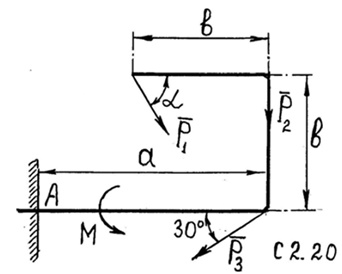
10874 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.20, -исходные данные приведены в таблице 2.
| Номер варианта |
Р1, кН |
P2, кН |
P3, кН |
M кН∙м |
a, м |
b, м |
α, град |
| С-2.20. |
6 |
6 |
9 |
4 |
1.3 |
0.8 |
60° |
|
Теоретическая механика |
C2.20. |
Теоретическая механика 2 |
300₽ |
|
|
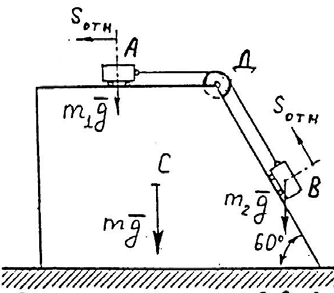
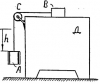
14758 |
По призме C массой m = 7 кг могут двигаться тележки A и B массами m1 = 1 кг и m2 = 2 кг соответственно. Тележки связаны невесомой нитью, переброшенной через неподвижный блок Д. В начальный момент система находится в покое, затем тележка A начинает двигаться относительно призмы влево по закону Sотн = 5t2 (м). Определить ускорение призмы.
|
Теоретическая механика |
Д9.7 |
Теоретическая механика 2 |
300₽ |
|
|
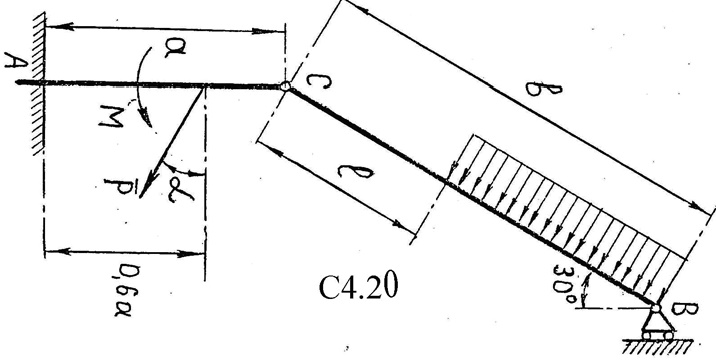
10954 |

ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. C4.20, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| C4.20 |
2 |
3 |
3 |
1.8 |
2.5 |
1.0 |
60° |
|
Теоретическая механика |
C4.20 |
Теоретическая механика 2 |
300₽ |
|
|
11034 |
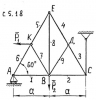
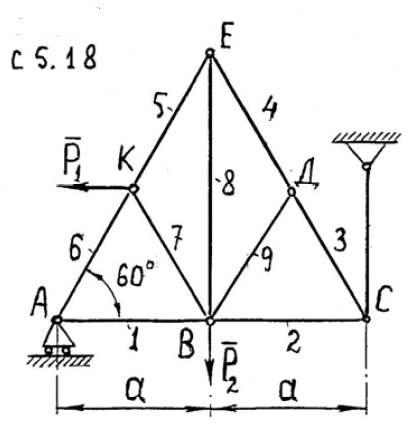
ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. C5.18 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| C5.18 |
2, 9, 4 |
1, 6 |
120 |
140 |
|
Теоретическая механика |
C5.18 |
Теоретическая механика 2 |
300₽ |
|
|
5051 |
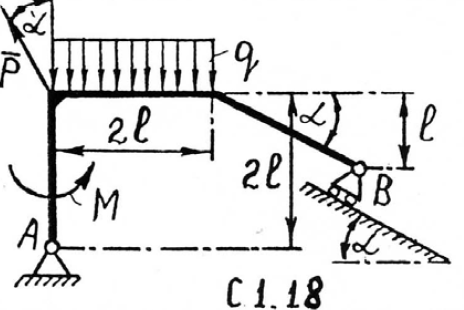
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
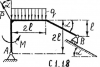
Определить реакции связей заданной плоской конструкции. Схемы конструкций указаны на рисунке С 1.8, исходные данные приведены в табл.
| Номер варианта |
P, кН |
G, кН |
M, кНм |
q, кН/м |
l, м |
α, град. |
| C1.18 |
14 |
- |
6 |
2 |
1 |
30° |
|
Теоретическая механика |
C1.18 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
11114 |
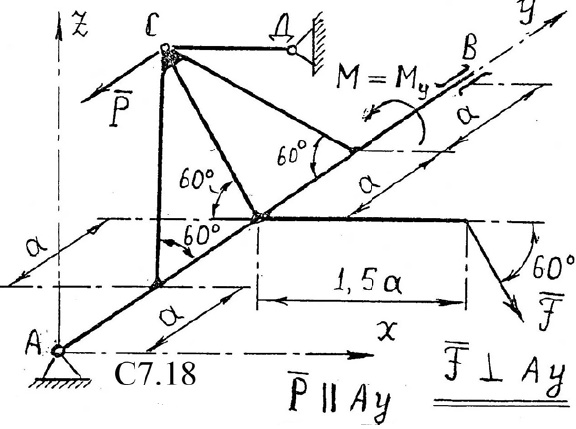
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунке.
|
Теоретическая механика |
C7.18 |
Теоретическая механика 2 |
300₽ |
|
|
8238 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. C1.10, исходные данные приведены в табл. 1.
| Номер варианта |
P, кН |
G, кН |
M, кНм |
q, кН/м |
l, м |
α, град |
| C1.10 |
15 |
10 |
50 |
- |
1 |
30° |
|
Теоретическая механика |
C1.10 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
14610 |
ПЛОСКО-ПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Для заданного положения механизма найти скорости точек В и С, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис. К6.1-К6.20
ОА = 30 см, АВ = 40 см, АС = 20 см, ωОА = 2 с-1
|
Теоретическая механика |
K6.16 |
Теоретическая механика 2 |
300₽ |
|
|
8406 |

ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. С3.2 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| С3.2 |
1, 7, 5 |
2, 3 |
80 |
50 |
|
Теоретическая механика |
C3.2_1 |
Теоретическая механика |
300₽ |
|
|
10890 |
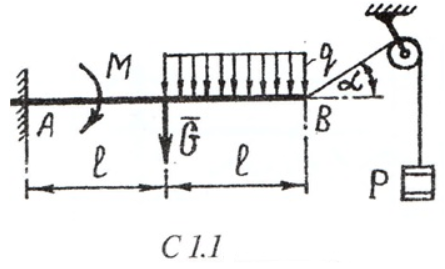
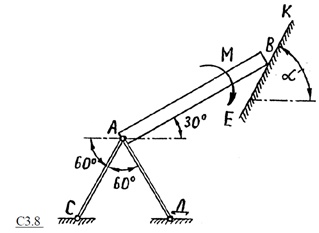
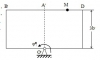
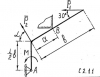
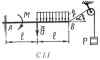
ОПРЕДЕЛЕНИЕ РЕАКЦИИ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
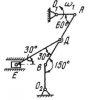
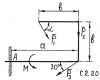
Схемы конструкций построены на рис. СЗ. 1 - С3.20. Однородная балка длиной l и весом P нагружена парой сил с моментом M и удерживается под углом 30° к горизонту невесомыми стержнями AC и AD и наклонной плоскостью EK. Определить давление балки на опорную плоскость и усилия в стержнях. P = 20 кН; M = 10 кН∙м; l = 4 м; α = 60°.
|
Теоретическая механика |
C3.8. |
Теоретическая механика 2 |
300₽ |
|
|
10970 |
СОСТАВЛЕНИЕ РАСЧЕТНОЙ СХЕМЫ ПЛОСКОЙ КОНСТРУКЦИИ
Используя принцип освобождаемости от связей, освободить плоскую конструкцию от связей и приложить к ней реакции связей. Равномерно-распределенную нагрузку заменить соответствующей равнодействующей силой. Силы, не параллельные осям координат, разложить на составляющие, параллельные осям координат. Построить расчетную схему конструкции. Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. C1.8, исходные данные приведены в табл. 1.
| Номер варианта |
Р, кН |
G, кН |
M, кН∙м |
q, кН∙м |
l, м |
α, град |
| C1.8 |
14 |
- |
6 |
2 |
1 |
30° |
|
Теоретическая механика |
C1.8 |
Теоретическая механика 2 |
300₽ |
|
|
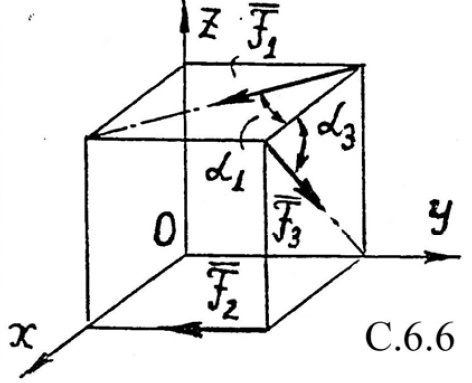
11050 |
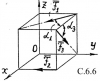
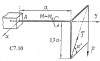
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллелепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C6.6 |
Теоретическая механика 2 |
300₽ |
|
|
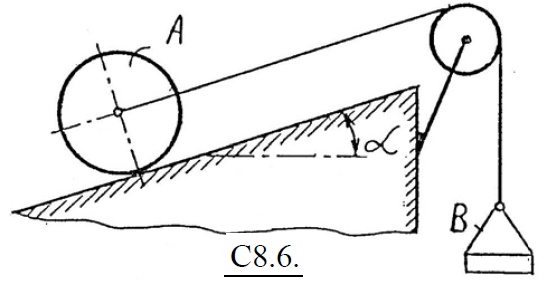
11130 |
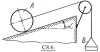
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
Расчетные схемы даны на рис. С8.6. Каток A радиуса r и весом Р лежит на наклонной плоскости с углом α. Определить наибольший вес груза Qmax груза B, при котором возможно равновесие, если коэффициент трения качения катка равен δ.
|
Теоретическая механика |
C8.6 |
Теоретическая механика 2 |
300₽ |
|
|
5128 |
ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Точка на ободе маховика в период разгона движется по закону φ = 0,8(t3 + 3t2), где угол φ задан в радианах, а время t - в секундах. Радиус маховика R = 1,6 м. Найти угловую скорость и угловое ускорение маховика, а также нормальное, касательное и полное ускорение точки обода маховика в тот момент времени, когда ее линейная скорость составляет v = 36 м/с. Сколько оборотов совершил маховик к этому моменту времени?
|
Теоретическая механика |
K4.18 |
Теоретическая механика 2 |
300₽ |
|
|
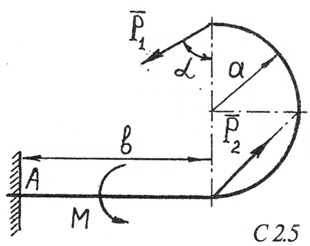
8338 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.5 -исходные данные приведены в таблице 2.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С-2.5 |
6 |
5 |
6 |
0,8 |
1 |
- |
60° |
|
Теоретическая механика |
С-2.5 |
Теоретическая механика |
300₽ |
|
|
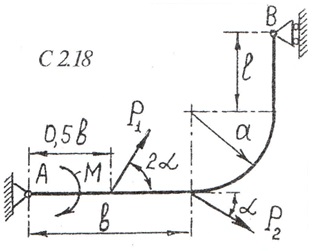
8436 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.18, -исходные данные приведены в таблице 2.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С-2.18 |
6 |
8 |
3 |
1.6 |
1.2 |
1.0 |
30° |
|
Теоретическая механика |
C2.18 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
14710 |
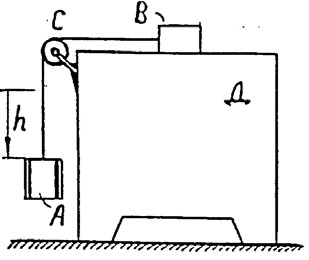
ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА МАСС
Груз A массой m1 и груз B массой m2 соединены нитью, переброшенной через невесомый блок C, ось которого скреплена с тумбой Д массой m. Тумба может скользить без трения по горизонтальной плоскости. На какое расстояние переместится тумба, если груз A опустится на высоту h?
|
Теоретическая механика |
Д4.13 |
Теоретическая механика 2 |
300₽ |
|
|
10906 |
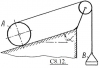
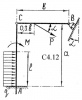
ОПРЕДЕЛЕНИЕ РЕАКЦИИ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Схемы конструкций построены на рис. СЗ. 1 - С3.20.
Однородная балка AB длиной l и весом P нагружена парой сил с моментом M и удерживается под углом 30° к горизонту невесомыми стержнями AC и AD и наклонной плоскостью EK. Определить давление балки на опорную плоскость и усилия в стержнях.
P = 25 кН; М =12 кН∙м; l = 5 м; α = 45°.
|
Теоретическая механика |
C3.16. |
Теоретическая механика 2 |
300₽ |
|
|
10986 |
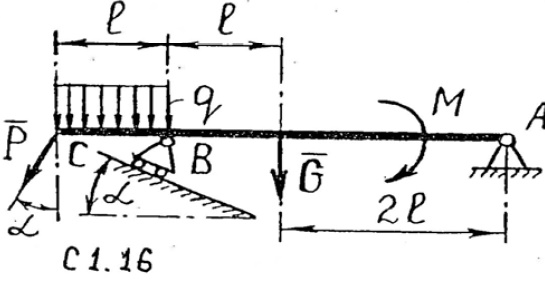
СОСТАВЛЕНИЕ РАСЧЕТНОЙ СХЕМЫ ПЛОСКОЙ КОНСТРУКЦИИ
Используя принцип освобождаемости от связей, освободить плоскую конструкцию от связей и приложить к ней реакции связей. Равномерно-распределенную нагрузку заменить соответствующей равнодействующей силой. Силы, не параллельные осям координат, разложить на составляющие, параллельные осям координат. Построить расчетную схему конструкции. Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. C1.16, исходные данные приведены в табл. 1.
| Номер варианта |
Р, кН |
G, кН |
M, кН∙м |
q, кН∙м |
l, м |
α, град |
| C1.16 |
15 |
5 |
2 |
3 |
1 |
30° |
|
Теоретическая механика |
C1.16 |
Теоретическая механика 2 |
300₽ |
|
|
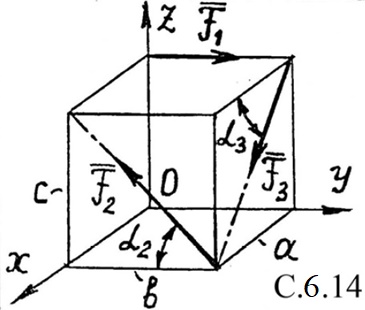
11066 |
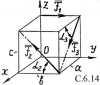
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C6.14 |
Теоретическая механика 2 |
300₽ |
|
|
5092 |
ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Маховое колесо радиуса R = 0.5 м имело начальную скорость ω0 = 30π с-1. Определить закон вращательного движения колеса, считая его равнозамедленным, а также касательное, нормальное и полное ускорение точки, лежащей на его ободе, если линейная скорость этой точки через 2 с после начала движения v = 30 м/с и начальный угол φ0 = 0.
|
Теоретическая механика |
K4.9 |
Теоретическая механика 2 |
300₽ |
|
|
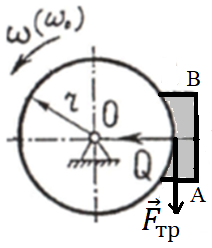
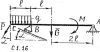
14296 |

К колесу радиусом r, вращающемуся с угловой скоростью ω, вокруг оси O. прижимают радиальной силой Q тормозную колодку АВ. Через T (c) после этого колесо вследствие трения остановилось. Определить значение коэффициента трения. Колесо считать однородным диском массой mт.
|
Теоретическая механика |
Д5.20 |
Теоретическая механика 2 |
300₽ |
|
|
6351 |

На участке трубы AB на груз D действует постоянная сила Q, направление которой показано на рисунке, и сила сопротивления R = µV2. Длина участка АВ = l. На участке BC на груз действует сила трения Fтр (коэффициент трения f = 0,1) и переменная сила F = 6 cos 4t, где F измеряется в ньютонах, a t - в секундах.
Определить уравнение движения груза D на участке ВС при следующих значениях параметров: m = 4 кг, Q = 10 Н; v0 = 12 м/с; µ = 0,8 Нс2/м2; v0 = 12 м/с; l = 2,5 м; g = 9,9 м/с2.
|
Теоретическая механика |
|
|
300₽ |
|
|
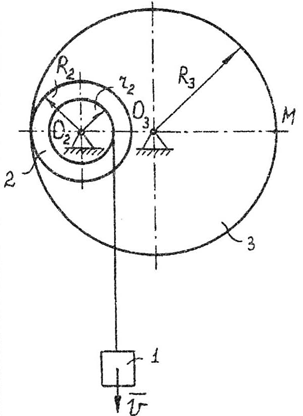
14560 |
ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.1 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.1 |
Теоретическая механика 2 |
300₽ |
|