|
14468 |

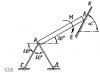
Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
18 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
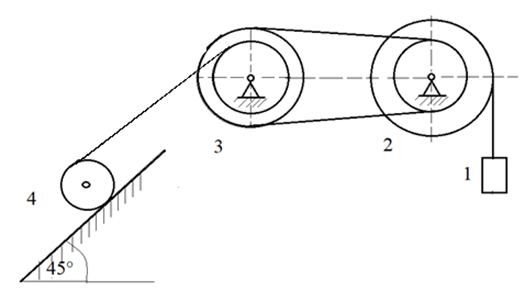
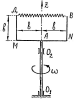
14492 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
26 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
11632 |

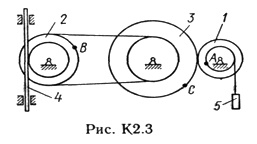
Механическая система, состоящая из четырех тел, приходит в движение под действием сил тяжести из состояния покоя. Начальное положение системы показано на рисунках 2.1-2.5. Учитывая трение качения тела 4 (вариант 19), пренебрегая другими силами сопротивления и массами нитей, предполагаемых нерастяжимыми, определить:
1. Скорость тела 1 в тот момент времени, когда пройденный им путь станет равным S1.
2. Ускорения тел, движущихся поступательно и ускорения центров масс тел, совершающих плоскопараллельное движение, угловое ускорение тел, совершающих вращательное и плоскопараллельное движения.
| Вариант № |
m1 |
m2 |
m3 |
m4 |
i2x |
i3x |
f |
δ, м |
| 19 |
6m |
3m |
2m |
m |
1,3r |
1,2r |
- |
0,001 |
|
Теоретическая механика |
|
|
400₽ |
|
|
8398 |
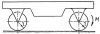
Тележка начинает движение из состояния покоя под действием момента М, приложенного к передним колёсам. Масса тележки без колёс равна m1, масса каждого из четырёх колёс радиусом r равна m2, коэффициент трения качения fδ. Определить ускорение тележки, считая колёса однородными дисками.
|
Теоретическая механика |
Д7.18 |
Теоретическая механика 2 |
400₽ |
|
|
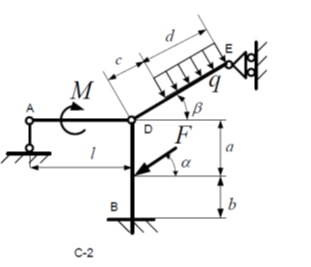
16913 |
Для указанной на рисунке (С-2) конструкции найти значения неизвестных реакций внешних и внутренних связей.
| № |
a, см |
b, см |
c, см |
d, см |
l, см |
α, ° |
β, ° |
q, Н/м |
F, Н |
M, Н∙м |
| 8 |
40 |
30 |
30 |
50 |
80 |
45 |
30 |
6 |
3 |
5 |
|
Теоретическая механика |
|
|
400₽ |
|
|
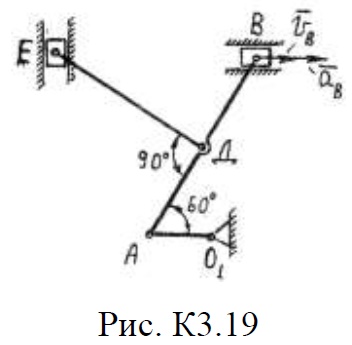
8618 |
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
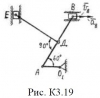
На рис. К3.19 показана схема механизма, причем
О1А = L1 = 0,4 м;
АВ = L1 = 1,4 м;
ДE = L3 = 1,2 м;
O2В = L4 = 0,6 м;
АД = ДВ.
Ползун в данном положении механизма имеет скорость VB = 4 м/с и ускорение aB = 6 м/с2. Для заданного положения механизма построить мгновенные центры скоростей шатунов АВ и ДЕ, найти скорости точек А, Д, Е, угловые скорости указанных шатунов и кривошипа О1А, а также ускорение точки А.
|
Теоретическая механика |
K1.19 |
Теоретическая механика 2 |
400₽ |
|
|
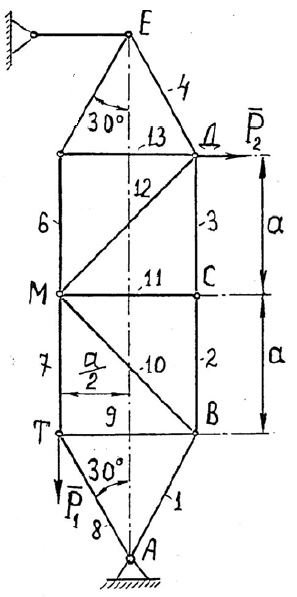
11038 |
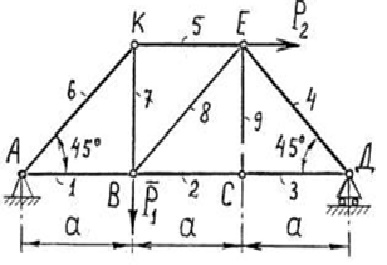
ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. C5.19 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| C5.19 |
7, 10, 2 |
5, 4 |
170 |
200 |
|
Теоретическая механика |
C5.19 |
Теоретическая механика 2 |
400₽ |
|
|
11006 |

ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. C5.4 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| C5.41 |
2, 8, 5 |
3, 4 |
70 |
90 |
|
Теоретическая механика |
C5.4 |
Теоретическая механика 2 |
400₽ |
|
|
11174 |

ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ОДНОРОДНОГО ТЕЛА
Найти положение центра тяжести плоской фермы, пластинки и объемного тела. Ферма состоит из однородных стержней; пластинка имеет малую постоянную толщину. Схемы тел показаны на рис. C9.8. Размеры ферм даны в метрах, остальных тел - в сантиметрах.
|
Теоретическая механика |
C9.8 |
Теоретическая механика 2 |
300₽ |
|
|
8938 |

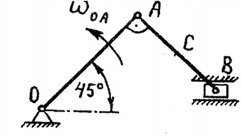
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
Для заданного положения механизма найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис. K1.l.
OA = 40 см = 0,40 м; AB = 30 см = 0,30 м; AC = 15 см = 0,15 м; ωOA = 2 c-1.
|
Теоретическая механика |
K6.1 |
Теоретическая механика 2 |
300₽ |
|
|
11266 |
КИНЕМАТИКА ТОЧКИ
Точка М движется по окружности радиуса R согласно уравнению S = S(t). Определить и построить для момента времени t1 скорость, касательное, нормальное и полное ускорение этой точки. Исходные данные для расчета приведены в табл. 2.
| № варианта |
S = S(t), cм |
R, см |
Время t1, с |
| К2.13 |
4t2 + 1 |
4t |
1 |
|
Теоретическая механика |
K2.13 |
Теоретическая механика 2 |
300₽ |
|
|
3292 |
 Груз массы m2 поднимают вверх при помощи троса и лебедки, к барабану которой приложена пара сил с моментом М. Найти уравнение движения груза, если в начальный момент он был неподвижен. Момент пары сил выражается зависимостью M = M0 + α∙t (α = const), причем M0 = m2∙g∙R, где R - радиус барабана. Груз массы m2 поднимают вверх при помощи троса и лебедки, к барабану которой приложена пара сил с моментом М. Найти уравнение движения груза, если в начальный момент он был неподвижен. Момент пары сил выражается зависимостью M = M0 + α∙t (α = const), причем M0 = m2∙g∙R, где R - радиус барабана.
|
Теоретическая механика |
D5.7 |
Теоретическая механика |
300₽ |
|
|
5105 |
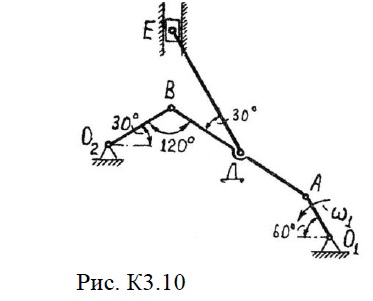
 ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
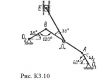
На рис. К3.10 показаны схемы механизмов, причем
О1А = L1 = 0,4 м;
АВ = L2 = 1,4 м;
ДE = L3 = 1,2 м;
O2В = L4 = 0,6 м;
АД = ДВ.
Кривошип O1А вращается вокруг оси O1 с постоянной угловой скоростью ω1 = ωOA = 4 с-1. Для заданного положения механизма построить мгновенные центры скоростей шатунов АВ и ДЕ, найти скорости точек А, В, Д, Е, угловые скорости указанных шатунов и кривошипа О2В, а также ускорение точки В.
|
Теоретическая механика |
K5.10 |
Теоретическая механика 2 |
300₽ |
|
|
6399 |

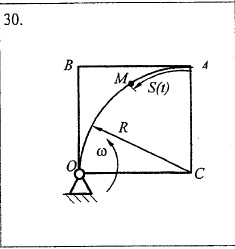
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По заданным уравнениям относительного движения точки S = S(t) по переносящему телу и угловой скорости ω = ω(t) этого тела приведенным в таблице, найти абсолютную скорость и абсолютное ускорение точки М в момент времени t1. Варианты расчетных схем изображены на рисунке.
| Номер варианта |
№ Дано |
ω(t), рад/c |
S(t), см |
R, см |
a, см |
t, сек |
| 30 |
2 |
-πt |
π(3+cos(2πt)) |
10 |
- |
1/3 |
Точка M пластины движется по дуге окружности радиуса R = 0,15 м вращается вокруг стороны квадрата AB с угловой скоростью ω = 3∙t (рад/с). По дуге окружности точка М двигается согласно уравнению AM = S(t) = 10∙π∙sin2(π∙t) (см). Определить абсолютные скорость и ускорение точки в момент времени t1 = 1/3 (с).
|
Теоретическая механика |
|
|
300₽ |
|
|
8492 |
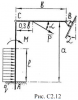
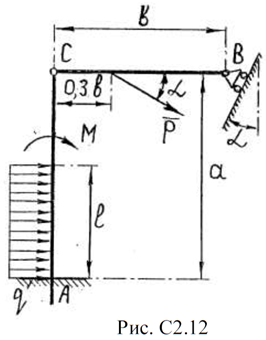
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. С2.12, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С2.12 |
7 |
4.8 |
2 |
1.5 |
3.0 |
1.3 |
30° |
|
Теоретическая механика |
C2.12_1 |
Теоретическая механика |
300₽ |
|
|
8378 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = 3∙cos(πt). у = 4∙sin(πt). найти траекторию точки, а также для заданного момента времени t1 =5/6 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 4.
| Номер варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| K1.2 |
3∙cos(πt) |
4∙sin(πt) |
5/6 |
|
Теоретическая механика |
K1.2_1 |
Теоретическая механика |
300₽ |
|
|
8578 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х=x(t), у=y(t). найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 4.
| Номер варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| K1.20 |
4t - 5t2 |
2t |
2 |
|
Теоретическая механика |
K1.20_1 |
Теоретическая механика |
300₽ |
|
|
8668 |
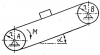
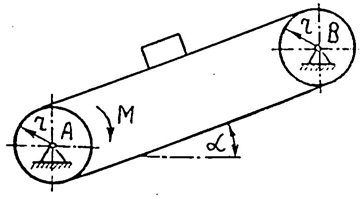
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
Транспортёр приводится в движение из состояния покоя моментом M, приложенным к нижнему шкиву. Определить ускорение груза массой m, если шкивы A и B радиусом r и массой m1 каждый представляют собой однородные круглые цилиндры. Лента транспортёра, массой которой следует пренебречь, образует с горизонтом угол α. Скольжение ленты по шкивам и груза по ленте отсутствует.
|
Теоретическая механика |
Д7,19 |
Теоретическая механика 2 |
300₽ |
|
|
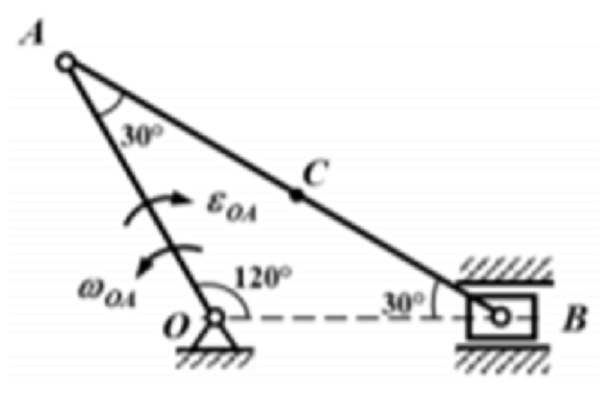
16842 |
Для заданного положения звеньев механизма определить скорости и ускорения точек В и С.
εOA = 2 рад/с2, ωОA = 3 рад/с, OA = 20 см, AC = CB.
|
Теоретическая механика |
|
|
300₽ |
|
|
11190 |
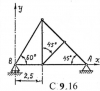
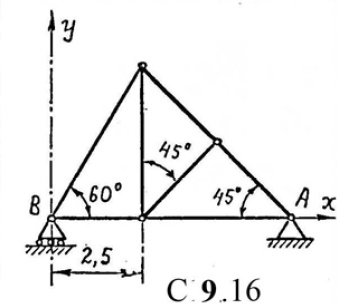
ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ОДНОРОДНОГО ТЕЛА
Найти положение центра тяжести плоской фермы, пластинки и объемного тела. Ферма состоит из однородных стержней; пластинка имеет малую постоянную толщину. Схемы тел показаны на рис. C9.16. Размеры ферм даны в метрах, остальных тел - в сантиметрах.
|
Теоретическая механика |
C9.16 |
Теоретическая механика 2 |
300₽ |
|
|
9022 |
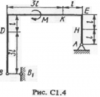
СТАТИКА
Жесткая рама (рис C1.4, табл. C1) закреплена в точке A шарнирно, а в точке B прикреплена или к невесомому стержню BB1, или к шарнирной опоре на катках, стержень прикреплен к раме и к неподвижной опоре шарнирами
На раму действуют пара сил с моментом M = 100 Н∙м и две силы, значения которых, направления и точки приложения указаны в таблице (например, в условиях № 1 на раму действуют сила F1 = 10 Н под углом 30° горизонтальной оси, приложенная в точке K, и сила F4 = 40 Н под углом 60° к горизонтальной оси, приложенная в точке H).
Определить реакции связей в точках A и B, вызываемые заданными нагрузками. При окончательных подсчетах принять l = 0,5 м.
|
Теоретическая механика |
C1.4 |
Теоретическая механика |
300₽ |
|
|
11684 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.21 |
12∙cos((π∙t)/6) |
-4t |
2 |
|
Теоретическая механика |
K1.21 |
Теоретическая механика 2 |
300₽ |
|
|
5046 |
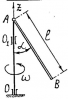
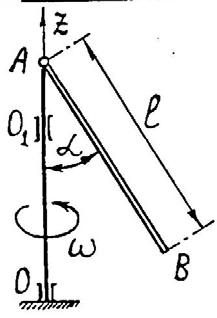
ПРИНЦИП ДАЛАМБЕРА
Тонкий однородный стержень АВ массой m и длиной l вращается с постоянной угловой скоростью ω вокруг вертикальной оси ОО1 (оси Оy). Вычислить угол отклонения стержня от вертикали, не учитывая трение в шарнире А. При каком наименьшем значении ω стержень отклонится от вертикали?
|
Теоретическая механика |
Д6.8 |
Теоретическая механика 2 |
300₽ |
|
|
5114 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунках С4.15.
|
Теоретическая механика |
C4.15_1 |
Теоретическая механика |
300₽ |
|
|
6493 |
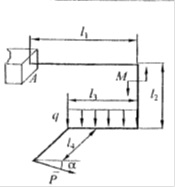
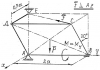
ПРОСТРАНСТВЕННАЯ СИСТЕМА СИЛ
Изогнутая под прямыми углами пространственная рама концом А заделана в неподвижную опору и нагружена равномерно распределенной нагрузкой интенсивностью q или линейное I распределенной нагрузкой с максимальной интенсивностью qmax, парой сил с моментом M и силой P, расположенной в плоскости перпендикулярной участку рамы длиной l4 и образующей угол α с прямой изображенной на рисунке. Определить опорные реакции рамы.
| Номер варианта |
Дано: |
P, Н |
M, Н∙м |
q, Н/м |
l1, м |
l2, м |
l3, м |
l4, м |
α, ° |
| 20 |
5 |
200 |
500 |
300 |
1,8 |
1,2 |
1,4 |
1 |
150 |
|
Теоретическая механика |
|
|
300₽ |
|
|
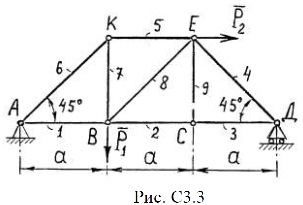
8508 |
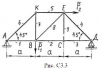
ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. С3.3 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| С3.3 |
2, 9, 4 |
1, 6 |
60 |
70 |
|
Теоретическая механика |
C3.3_1 |
Теоретическая механика |
300₽ |
|
|
8596 |
ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Диск турбины вращается вокруг неподвижной оси по закону φ = At2 + Bt, где φ задан в радианах, а время t - в секундах; A и B – постоянные коэффициенты. Остановка диска турбины произошла через 2 мин после ее отключения. Угловая скорость диска в момент времени t1 = 60 c имела значение ω1 = 120 c-1. Найти скорость и ускорение точки диска, отстоящей от оси вращения на 10 см, в момент времени t2 = 90 с.
|
Теоретическая механика |
K4.19 |
Теоретическая механика 2 |
300₽ |
|
|
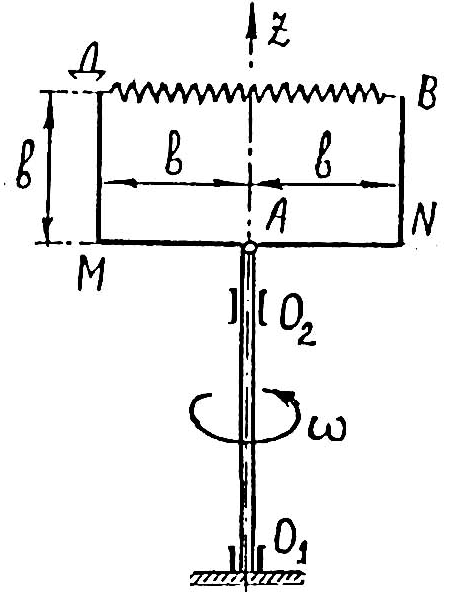
8686 |
ПРИНЦИП ДАЛАМБЕРА
Тонкие однородные стержни АВС и АДЕ одинаковой массы m, изогнутые под прямым углом, соединены в точке А шарниром. Стержни вращается вокруг вертикальной оси Оу с постоянной угловой скоростью ω. При этом они удерживаются в положении, при котором части ВС и ДЕ параллельны, а АВ и АД перпендикулярны оси вращения, при помощи пружины СЕ. Определить усилие в пружине.
|
Теоретическая механика |
Д6.1 |
Теоретическая механика 2 |
300₽ |
|
|
11206 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.4 |
3cos(πt/3) - 2 |
5sin(πt/3) |
4 |
|
Теоретическая механика |
K1.4 |
Теоретическая механика 2 |
300₽ |
|
|
9706 |
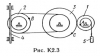
КИНЕМАТИКА
Механизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза S, привязанного к концу нити, намотанной на одно из колес (рис K2.0 — K2 9, табл. K2). Радиусы ступеней колес равны соответственно у колеса 1 — r1 = 2 см, R1 = 4 см, у колеса 2 — r2 = 6 см, R2 = 8 см, у колеса 3 — r3 = 12 см, R3 = 16 см. На ободьях колес расположены точки A, B и C.
| Номер условия |
Дано |
Найти |
| скорости |
ускорения |
| 0 |
S4 = 4(7t - t2) |
vB, vC |
ε2, aA, a5 |
В столбце «Дано» таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где S4(t) — закон движения рейки 4, v4(t) — закон изменения скорости колеса 2, vC(t) — закон изменения скорости колеса 3 и т д (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s4, s5 и v4, v5 — вниз.
Определить в момент времени t1 = 2 с указанные в таблице в столбцах «Найти» скорости (v — линейные, ω — угловые) и ускорения (a — линейные, ε — угловые) соответствующих точек или тел (v5— скорость груза 5 и т.д.).
|
Теоретическая механика |
|
|
300₽ |
|
|
12486 |
Для заданного механизма найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки.
AB = 15 см; r = 15 см ; ωOA = 4 c-1; ω1 = 3 c-1.
|
Теоретическая механика |
K1.19 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
5061 |
 ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. С3.6 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| С3.6 |
2,7,4 |
1,5 |
110 |
70 |
|
Теоретическая механика |
C3.6_1 |
Теоретическая механика |
300₽ |
|
|
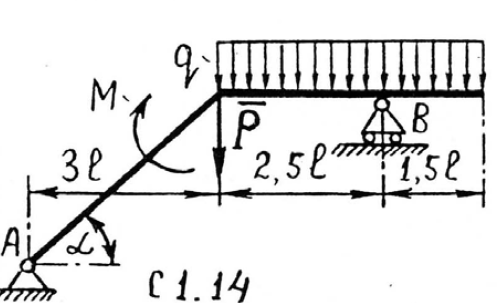
8246 |
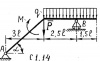
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. C1.14, исходные данные приведены в табл. 1.
| Номер варианта |
P, кН |
G, кН |
M, кНм |
q, кН/м |
l, м |
α, град |
| C1.14 |
15 |
- |
3 |
4 |
1 |
45° |
|
Теоретическая механика |
C1.14 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
8524 |
ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
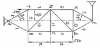
Определить усилия в стержнях плоской фермы рис. С3.16 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| С3.19 |
7, 10, 2 |
5, 4 |
170 |
200 |
|
Теоретическая механика |
C3.19-20 |
Теоретическая механика |
300₽ |
|
|
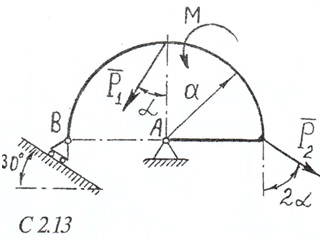
8422 |

ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.13, -исходные данные приведены в таблице 2.
Таблица 2
| Номер варианта |
Р, кН |
М, кН∙м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С-2.13 |
12 |
10 |
6 |
1 |
- |
- |
30° |
|
Теоретическая механика |
C2.13 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
8612 |

ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
На рис. К3.13 показана схема механизма, причем
О1А = L1 = 0,4 м;
АВ = L2 = 1,4 м;
ДE = L3 = 1,2 м;
O2В = L4 = 0,6 м;
АД = ДВ.
Ползун в данном положении механизма имеет скорость VB = 4 м/с и ускорение aB = 6 м/с2. Для заданного положения механизма построить мгновенные центры скоростей шатунов АВ и ДЕ, найти скорости точек А, Д, Е, угловые скорости указанных шатунов и кривошипа О1А, а также ускорение точки А.
|
Теоретическая механика |
K5.13 |
Теоретическая механика 2 |
300₽ |
|
|
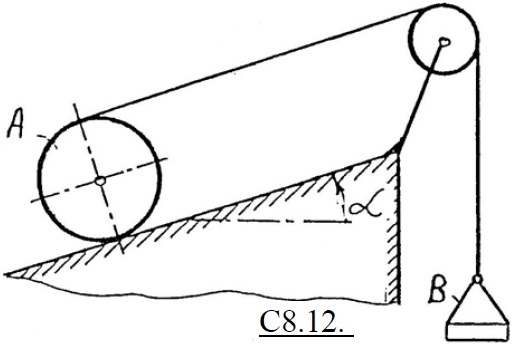
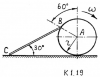
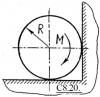
11142 |
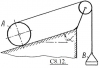
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
Расчетные схемы даны на рис. С8.12. Каток радиуса весом P лежит на наклонной плоскости с утлом α. Определить наименьший вес Qmin груза B, при котором возможно равновесие, если коэффициент трения качения катка равен δ.
|
Теоретическая механика |
C8.12 |
Теоретическая механика 2 |
300₽ |
|
|
11222 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.12 |
2sin(πt/6) - 4 |
3cos(πt/6) |
2 |
|
Теоретическая механика |
K1.12 |
Теоретическая механика 2 |
300₽ |
|
|
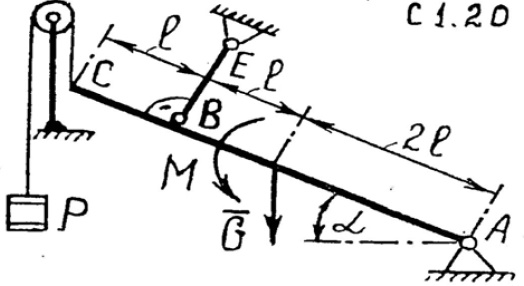
5087 |

СОСТАВЛЕНИЕ РАСЧЕТНОЙ СХЕМЫ ПЛОСКОЙ КОНСТРУКЦИИ
Используя принцип освобождаемости от связей, освободить плоскую конструкцию от связей и приложить к ней реакции связей. Равномерно-распределенную нагрузку заменить соответствующей равнодействующей силой. Силы, не параллельные осям координат, разложить на составляющие, параллельные осям координат. Построить расчетную схему конструкции. Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. C1.20, исходные данные приведены в табл. 1.
| Номер варианта |
Р, кН |
G, кН |
M, кН∙м |
q, кН∙м |
l, м |
α, град |
| C1.19 |
15 |
10 |
50 |
- |
1 |
30° |
|
Теоретическая механика |
C1.19 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
14108 |
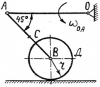
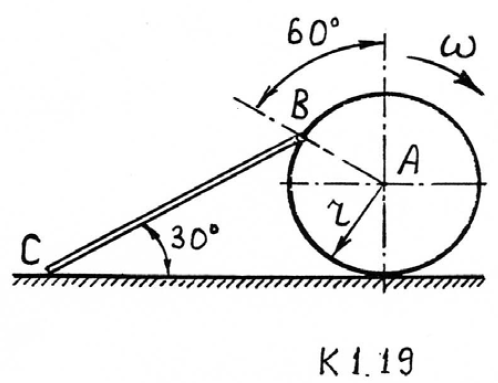
ПЛОСКО-ПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Для заданного положения механизма или колеса найти скорости точек A, B и С, а также угловые скорости звеньев механизма, колес, катящихся без скольжения К 1.20 определить дополнительно угловую скорость колеса и скорость точки Д.
OA = 50 см; AB = 40 см; AC = 20 см; r = 15 см; ωOA = 3 c-1.
|
Теоретическая механика |
K1.20 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
8446 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. С2.2, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С2.2 |
6 |
4 |
2 |
1.3 |
2.5 |
1 |
60° |
|
Теоретическая механика |
C2.2_1 |
Теоретическая механика |
300₽ |
|
|
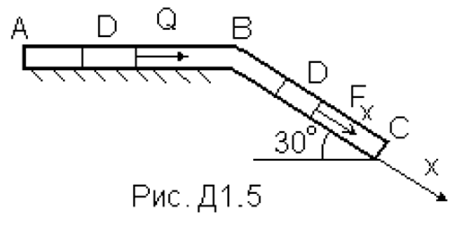
14806 |
Груз D массой m, получив в точке A начальную скорость v0, движется в изогнутой трубе АВС, расположенной в вертикальной плоскости; участки трубы или оба наклонные, или один горизонтальный, а другой наклонный (рис.3.1, табл. 3.2).
На участке АВ на груз кроме силы тяжести действуют постоянная сила Q (ее направление показано на рисунках).
В точке B груз, не изменяя своей скорости, переходит на участок BC трубы, где на него кроме силы тяжести действует переменная сила F, проекция которой Fx на ось х задана в таблице.
Считая груз материальной точкой и зная время t1 движения груза от точки A до точки B, найти скорость груза на участке BC через t2 = 2 сек. после выхода из точки B. Трением груза о трубу пренебречь.
| Вариант |
m, кг |
v0, м/c |
Q, Н |
t1, с |
Fx, Н |
| 5 |
4,5 |
22 |
9 |
3 |
t3 + 2t |
|
Теоретическая механика |
Д1-5 |
Методичка по термеху. Нижний Новгород. 2019 год |
300₽ |
|
|
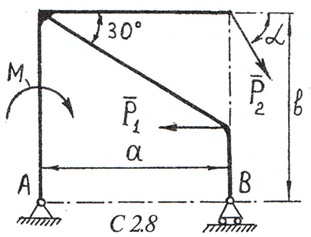
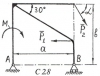
8344 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.8 -исходные данные приведены в таблице 2.
Таблица 2
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С2.8 |
2 |
5 |
12 |
1,8 |
1,8 |
- |
60° |
|
Теоретическая механика |
C2.8 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
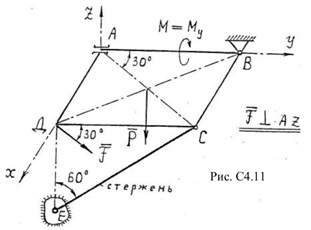
8542 |

ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунках С4.11.
|
Теоретическая механика |
C4.11_1 |
Теоретическая механика |
300₽ |
|
|
8628 |
Точка М движется по ободу диска радиуса R = 0,3 м со скоростью vотн = 4 м/с . Определить абсолютную скорость точки М в указанном положении, если закон вращения диска φ = 2t2 рад.
|
Теоретическая механика |
K7.11 |
Теоретическая механика 2 |
300₽ |
|
|
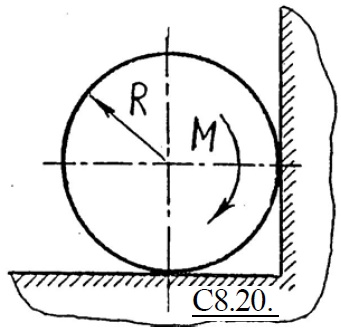
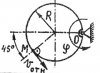
11158 |
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
Расчетные схемы даны на рис. С8.20. Цилиндр радиуса R и весом P лежит на шероховатой плоскости и упирается в шероховатую стену. При каком моменте М пары сил, приложенных к цилиндру, он будет находиться в равновесии? Коэффициент трения скольжения цилиндра по плоскости равен f.
|
Теоретическая механика |
C8.20 |
Теоретическая механика 2 |
300₽ |
|
|
11238 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х=х(t), у=у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.20 |
4t - 5t2 |
2t |
2 |
|
Теоретическая механика |
K1.20 |
Теоретическая механика 2 |
300₽ |
|
|
3283 |

ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ.
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунке.
|
Теоретическая механика |
C4.7_1 |
Теоретическая механика |
300₽ |
|
|
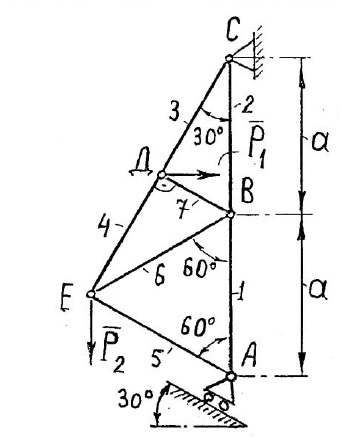
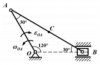
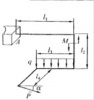
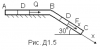
13966 |
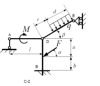
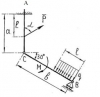
ОПРЕДЕЛЕНИЕ РЕАКЦИИ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Схемы конструкций построены на рис. СЗ.1 - С3.20. Однородная балка длиной l и весом P нагружена парой сил с моментом M и удерживается под углом 30° к горизонту невесомыми стержнями AC и AD и наклонной плоскостью EK. Определить давление балки на опорную плоскость и усилия в стержнях. P = 25 кН; M = 12 кН∙м; l = 5 м; α = 60°.
|
Теоретическая механика |
С3-17 |
Теоретическая механика |
300₽ |
|
|
5096 |
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
Шар весом Р, лежащий на пружине с коэффициентом жѐсткости с, вызывает статическую осадку пружины 0,025 м. Какова будет осадка пружины, если тот же шар упадѐт на пружину с высоты h = 0,1 м. Массой пружины пренебречь.
|
Теоретическая механика |
Д3.9 |
Теоретическая механика 2 |
300₽ |
|