|
5133 |
 ПРИНЦИП ДАЛАМБЕРА ПРИНЦИП ДАЛАМБЕРА
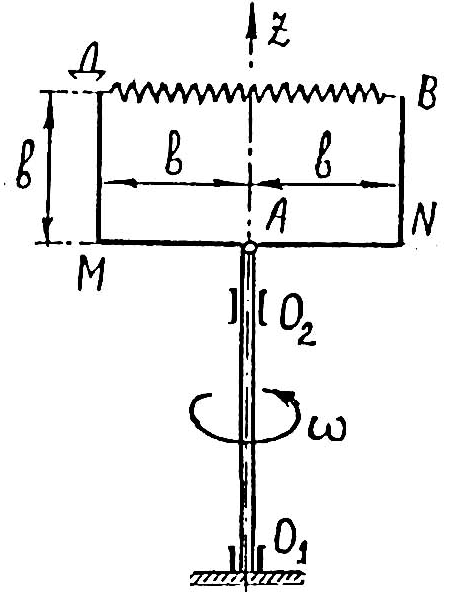
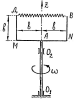
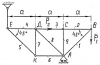
Тонкие однородные стержни АВ и ДЕ массами т, на концах которых закреплены точечные грузы В и Е тоже массами т, вращаются вокруг неподвижной оси O1O2. Оба стержня перпендикулярны к оси вращения, причём АВ || O1у; ДЕ || O1х. Даны размеры: О1Д = ДА = АО2 = b; АВ = ДЕ = l. Определить реакции подпятника и подшипника.
|
Теоретическая механика |
Д6.18 |
Теоретическая механика 2 |
300₽ |
|
|
10928 |

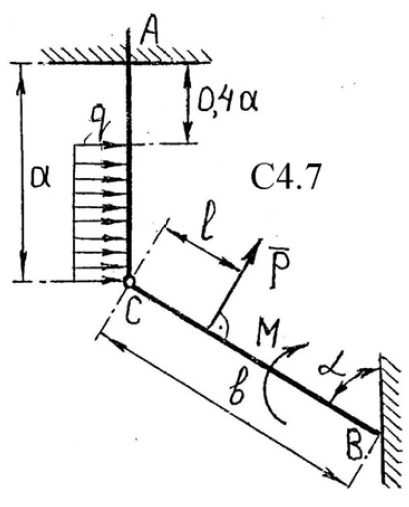
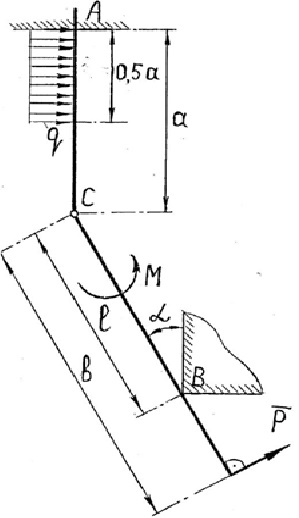
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. C4.7, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| C4.7 |
6 |
3.6 |
2 |
1.5 |
3 |
1.5 |
30° |
|
Теоретическая механика |
C4.7 |
Теоретическая механика 2 |
300₽ |
|
|
8354 |

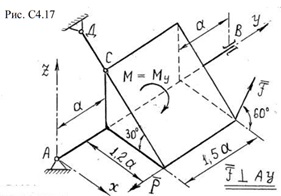
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунках С4.17.
|
Теоретическая механика |
K4.17 |
Теоретическая механика |
300₽ |
|
|
12400 |
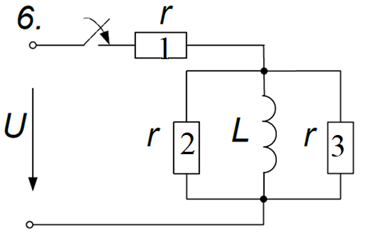
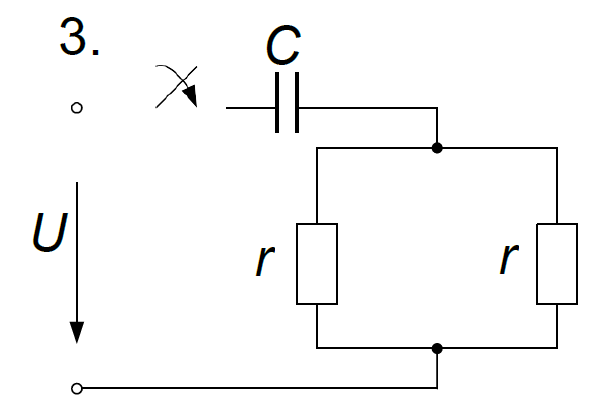
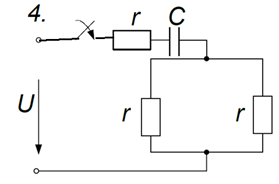
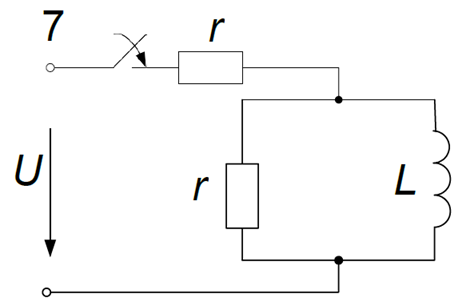
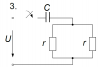
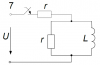
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 3 |
20 |
250 |
- |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
136 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
8442 |
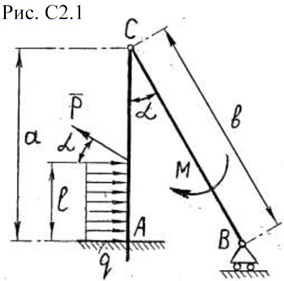
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. С2.1, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С2.1_1 |
5 |
4.4 |
3 |
2.8 |
2.3 |
1.5 |
30° |
|
Теоретическая механика |
C2.1_1 |
Теоретическая механика |
300₽ |
|
|
12480 |
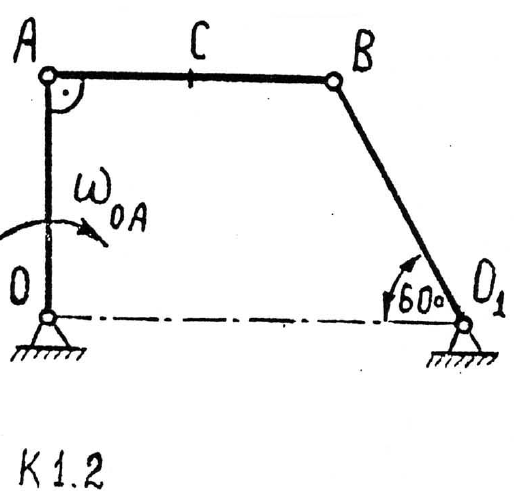
Для заданного механизма найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки.
OA = 30 см = 0,30 м; AB = 40 см = 0,40 м; AC = 20 см = 0,20 м; ωOA = 2 c-1.
|
Теоретическая механика |
K1.2 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
18264 |

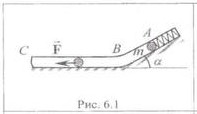
Шарик массы m движется из положения A внутри изогнутой трубки, расположенной в вертикальной плоскости. Шарик, пройдя путь l0, отделяется oт пружины. В точке B шарик, не меняя значения своей скорости, переходит на участок BC, где на него дополнительно действует переменная сила F, направление которой указано на рисунке. Пользуясь общими теоремами динамики точки, определить скорость шарика в положениях B и C. В задании принята следующие обозначения: vA - начальная скорость шарика, AB - длина участка, τ - время движения на участке BC, f - коэффициент трения скольжения шарика по стенке трубки, c - коэффициент жесткости пружины.
| № |
Рис. |
m |
vA |
f |
AB |
l0 |
c |
α |
β |
τ |
F(t) |
| 17 |
|
кг |
м/с |
|
м |
см |
Н/см |
град |
с |
Н |
| 6.1 |
0,6 |
0 |
0,12 |
0,5 |
15 |
0,9 |
60 |
- |
1,2 |
- |
|
Механика |
|
|
300₽ |
|
|
5097 |
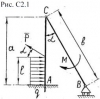
ПРИНЦИП ДАЛАМБЕРА
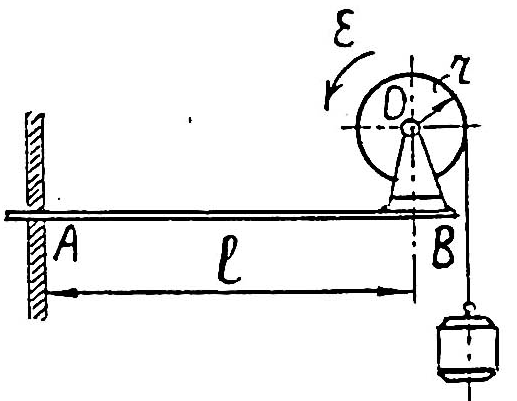
Барабан лебедки радиусом r, установленной на жёсткой балке АВ, вращается с угловым ускорением ε. Масса поднимаемого груза - m, момент инерции барабана лебёдки вместе с двигателем равен Jс, длина балки - l. Определить реакции заделки жёсткой консольной балки АВ. Массой каната и балки пренебречь.
|
Теоретическая механика |
Д6.9 |
Теоретическая механика 2 |
300₽ |
|
|
10864 |
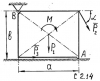
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.14, -исходные данные приведены в таблице 2.
| Номер варианта |
Р1, кН |
P2, кН |
P3, кН |
M кН∙м |
a, м |
b, м |
α, град |
| С-2.14. |
8 |
9 |
6 |
4 |
1.1 |
0.9 |
60° |
|
Теоретическая механика |
C2.14. |
Теоретическая механика 2 |
300₽ |
|
|
12336 |
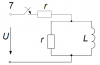
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 6 |
10 |
- |
150 |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
163 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
10944 |

ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. C4.15, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| C4.15 |
5 |
3.6 |
3 |
2.3 |
4 |
1.8 |
30° |
|
Теоретическая механика |
C4.15 |
Теоретическая механика 2 |
300₽ |
|
|
12416 |
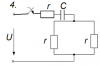
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 1 |
15 |
120 |
- |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
117 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
12590 |
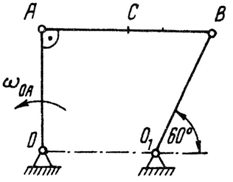
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис. K6.1-K6.20
OA = 30 см = 0,30 м; AB = 50 см = 0,50 м; AC = 25 см = 0,25 м; ωOA = 3 c-1.
|
Теоретическая механика |
K6.15 |
Теоретическая механика 2 |
300₽ |
|
|
13814 |
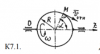
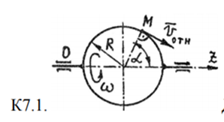
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
Диск радиуса R = 0,3 м вращается вокруг оси 0Z с угловой скоростью ω = 2 с-1. По его ободу движется точка с постоянной скоростью Vотн = 0,3 м/с. Определить абсолютную скорость точки в указанном положении, если угол α = 60°.
|
Теоретическая механика |
K7.1 |
Теоретическая механика 2 |
300₽ |
|
|
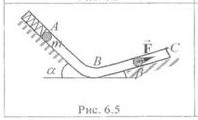
18272 |

Шарик массы m движется из положения A внутри изогнутой трубки, расположенной в вертикальной плоскости. Шарик, пройдя путь l0, отделяется oт пружины. В точке B шарик, не меняя значения своей скорости, переходит на участок BC, где на него дополнительно действует переменная сила F, направление которой указано на рисунке. Пользуясь общими теоремами динамики точки, определить скорость шарика в положениях B и C. В задании принята следующие обозначения: vA - начальная скорость шарика, AB - длина участка, τ - время движения на участке BC, f - коэффициент трения скольжения шарика по стенке трубки, c - коэффициент жесткости пружины.
| № |
Рис. |
m |
vA |
f |
AB |
l0 |
c |
α |
β |
τ |
F(t) |
| 13 |
|
кг |
м/с |
|
м |
см |
Н/см |
град |
с |
Н |
| 6.5 |
0,3 |
0 |
0,05 |
0,3 |
20 |
1,9 |
45 |
15 |
1,2 |
1,5(1-t/3) |
|
Механика |
|
|
300₽ |
|
|
11586 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у=у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 4.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| 5 |
7t2 - 3 |
5t |
1/4 |
|
Теоретическая механика |
5 |
|
300₽ |
|
|
16583 |

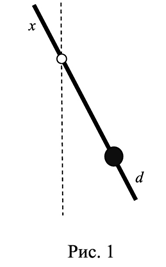
Физический маятник представляет собой тонкий однородный стержень длиной l = 1 м и массой m, на котором жестко закреплена материальная точка массой M на расстоянии d (d < l/2) от нижнего конца стержня. Точка подвеса маятника находится на расстоянии x (x < l/2) от верхнего конца стержня (рис. 1). Найти зависимость периода малых колебаний T маятника от расстояния x и построить график этой зависимости T(x) в интервале изменения x от 0 до l/2. Определить по графику минимальное значение периода T колебаний маятника. Ускорение свободного падения g = 9,81 м/c2.
| № варианта |
d, M/m |
| 5 |
d = 0,3 м, M/m = 1,0 |
|
Механика |
|
|
300₽ |
|
|
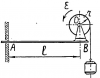
5106 |
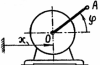
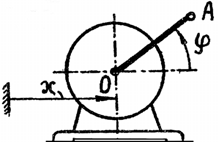
К валу электромотора, вращающемуся согласно уравнению $\varphi = \omega t$, прикреплен под прямым углом стержень ОА длиной l. Электромотор, установленный без креплений, совершает гармонические колебания по закону $x = b \cos \omega t$. Определить абсолютную скорость точки А стержня в момент времени $t_1 = \frac{\pi}{2\omega}$.
|
Теоретическая механика |
K7.10 |
Теоретическая механика 2 |
300₽ |
|
|
10880 |
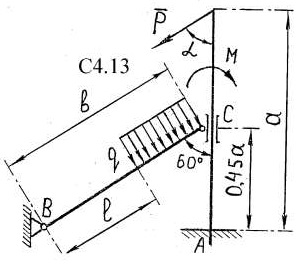
ОПРЕДЕЛЕНИЕ РЕАКЦИИ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
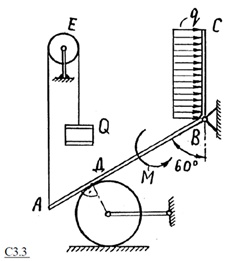
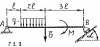
Схемы конструкций построены на рис. СЗ. 1 - С3.20. Рычаг ABC с осью вращения в точке В, опирающийся в точке Д на гладкий цилиндр, испытывает действие груза Q. распределенной нагрузки интенсивности q и пары сил с моментом M. Пренебрегая весом рычага, найти реакции опор, если АВ = 2ВС = 2а; АД = 0,5а; Q = 8 кH: q = 3 кH/м; М = 5 кН м; а = 2,5 м.
|
Теоретическая механика |
C3.3. |
Теоретическая механика 2 |
300₽ |
|
|
12352 |
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 2 |
25 |
- |
120 |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
124 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
10960 |
СОСТАВЛЕНИЕ РАСЧЕТНОЙ СХЕМЫ ПЛОСКОЙ КОНСТРУКЦИИ
Используя принцип освобождаемости от связей, освободить плоскую конструкцию от связей и приложить к ней реакции связей. Равномерно-распределенную нагрузку заменить соответствующей равнодействующей силой. Силы, не параллельные осям координат, разложить на составляющие, параллельные осям координат. Построить расчетную схему конструкции. Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. C1.3, исходные данные приведены в табл. 1.
| Номер варианта |
Р, кН |
G, кН |
M, кН∙м |
q, кН∙м |
l, м |
α, град |
| C1.3 |
- |
10 |
4 |
3 |
1 |
45° |
|
Теоретическая механика |
C1.3 |
Теоретическая механика 2 |
300₽ |
|
|
14572 |

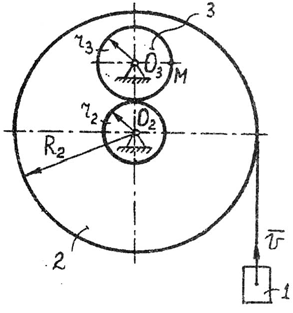
ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.7 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.7 |
Теоретическая механика 2 |
300₽ |
|
|
8388 |

ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
На рис. К3.18 показана схема механизма, причем
О1А = L1 = 0,4 м;
АВ = L2 = 1,4 м;
ДE = L3 = 1,2 м;
O2В = L4 = 0,6 м;
АД = ДВ.
Ползун в данном положении механизма имеет скорость VB = 4 м/с и ускорение aB = 6 м/с2. Для заданного положения механизма построить мгновенные центры скоростей шатунов АВ и ДЕ, найти скорости точек А, Д, Е, угловые скорости указанных шатунов и кривошипа О1А, а также ускорение точки А.
|
Теоретическая механика |
K5.17 |
Теоретическая механика 2 |
300₽ |
|
|
12432 |
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 9 |
25 |
30 |
- |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
197 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
11046 |
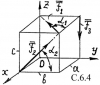
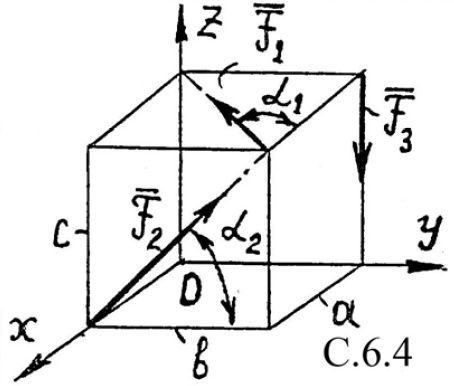
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C6.4 |
Теоретическая механика 2 |
300₽ |
|
|
8494 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. С2.13, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С2.13 |
5 |
6 |
2 |
3 |
2.5 |
1.0 |
60° |
|
Теоретическая механика |
C2.13_1 |
Теоретическая механика |
300₽ |
|
|
11126 |
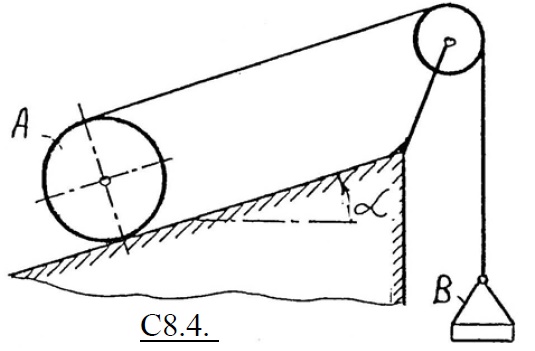
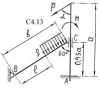
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
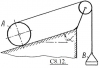
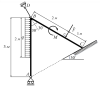
Расчетные схемы даны на рис. С8.4. Каток A радиуса r и весом P лежит на наклонной плоскости с утлом α. Определить наименьший вес Qmin груза B, при котором возможно равновесие, если коэффициент трения качения катка равен δ.
|
Теоретическая механика |
C8.4 |
Теоретическая механика 2 |
300₽ |
|
|
8580 |
ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Турбина вращается равноускоренно вокруг неподвижной оси. В начальный момент времени угловая скорость турбины ω0 = 30π с-1 и через 30 с достигает значения 39π с-1. Найти закон вращения турбины, а также определить в момент времени t2 = 40 с скорость и ускорение точки турбины, отстоящей от оси вращения на расстоянии 0,6 м.
|
Теоретическая механика |
K4.1 |
Теоретическая механика 2 |
300₽ |
|
|
11206 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.4 |
3cos(πt/3) - 2 |
5sin(πt/3) |
4 |
|
Теоретическая механика |
K1.4 |
Теоретическая механика 2 |
300₽ |
|
|
8668 |
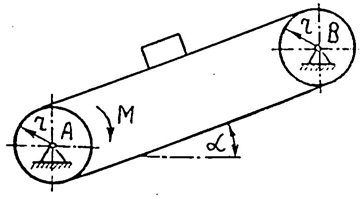
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
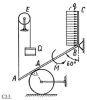
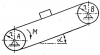
Транспортёр приводится в движение из состояния покоя моментом M, приложенным к нижнему шкиву. Определить ускорение груза массой m, если шкивы A и B радиусом r и массой m1 каждый представляют собой однородные круглые цилиндры. Лента транспортёра, массой которой следует пренебречь, образует с горизонтом угол α. Скольжение ленты по шкивам и груза по ленте отсутствует.
|
Теоретическая механика |
Д7,19 |
Теоретическая механика 2 |
300₽ |
|
|
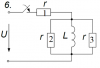
18148 |
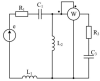
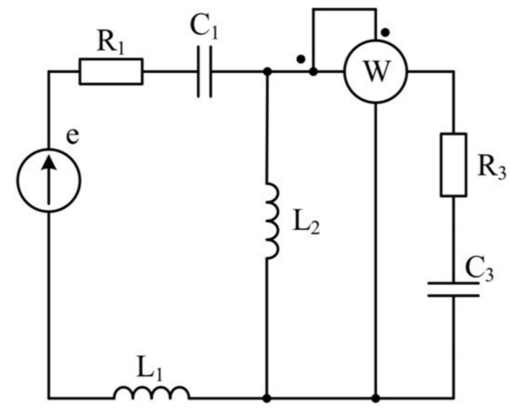
Пример расчёта электрической цепи синусоидальном тока комплексным методом
Для электрической цепей синусоидального однофазного тока, представленной на рисунке 2.6, необходимо выполнить следующее:
1. Определить токи в ветвях заданной электрической цепи, используя комплексный метод расчёта.
2. Составить баланс мощностей в комплексном виде.
3. Записать мгновенное значение тока в неразветвлённой части цепи.
4. Определить показание ваттметра.
5. Для любого замкнутого контура, содержащего источник ЭДС, построить векторную диаграмму напряжений, совмещённую с векторной диаграммой токов.
| Em, B |
φe, град |
R1, Ом |
R3, Ом |
L1, мГн |
L2, мГн |
C1, мкФ |
C3, мкФ |
| 127 |
40 |
18 |
14 |
41,5 |
16 |
796 |
159 |
|
Электротехника |
|
|
300₽ |
|
|
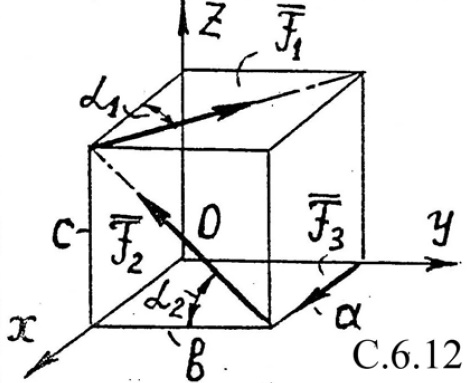
11062 |
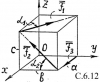
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C6.12 |
Теоретическая механика 2 |
300₽ |
|
|
8510 |
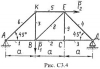
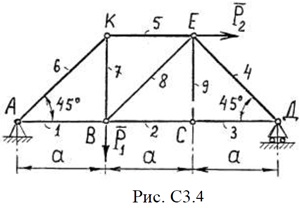
ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. С3.4 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| С3.4 |
2, 8, 5 |
3, 4 |
70 |
90 |
|
Теоретическая механика |
C3.4_1 |
Теоретическая механика |
300₽ |
|
|
11142 |
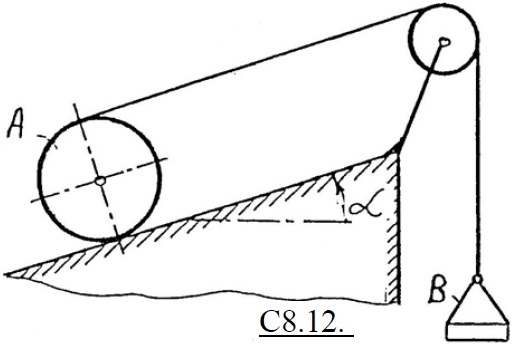
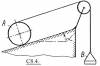
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
Расчетные схемы даны на рис. С8.12. Каток радиуса весом P лежит на наклонной плоскости с утлом α. Определить наименьший вес Qmin груза B, при котором возможно равновесие, если коэффициент трения качения катка равен δ.
|
Теоретическая механика |
C8.12 |
Теоретическая механика 2 |
300₽ |
|
|
14760 |
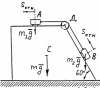
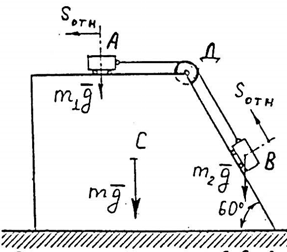
По призме C массой m = 7 кг могут двигаться тележки A и B массами m1 = 1 кг и m2 = 2 кг соответственно. Тележки связаны невесомой нитью, переброшенной через неподвижный блок Д. В начальный момент система находится в покое, затем тележка A начинает двигаться относительно призмы влево по закону Sотн = 5t3, м. Oпределить скорость призмы при t = 0,5 с.
|
Теоретическая механика |
Д9.8 |
Теоретическая механика 2 |
300₽ |
|
|
8596 |
ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Диск турбины вращается вокруг неподвижной оси по закону φ = At2 + Bt, где φ задан в радианах, а время t - в секундах; A и B – постоянные коэффициенты. Остановка диска турбины произошла через 2 мин после ее отключения. Угловая скорость диска в момент времени t1 = 60 c имела значение ω1 = 120 c-1. Найти скорость и ускорение точки диска, отстоящей от оси вращения на 10 см, в момент времени t2 = 90 с.
|
Теоретическая механика |
K4.19 |
Теоретическая механика 2 |
300₽ |
|
|
11222 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.12 |
2sin(πt/6) - 4 |
3cos(πt/6) |
2 |
|
Теоретическая механика |
K1.12 |
Теоретическая механика 2 |
300₽ |
|
|
8686 |
ПРИНЦИП ДАЛАМБЕРА
Тонкие однородные стержни АВС и АДЕ одинаковой массы m, изогнутые под прямым углом, соединены в точке А шарниром. Стержни вращается вокруг вертикальной оси Оу с постоянной угловой скоростью ω. При этом они удерживаются в положении, при котором части ВС и ДЕ параллельны, а АВ и АД перпендикулярны оси вращения, при помощи пружины СЕ. Определить усилие в пружине.
|
Теоретическая механика |
Д6.1 |
Теоретическая механика 2 |
300₽ |
|
|
18156 |
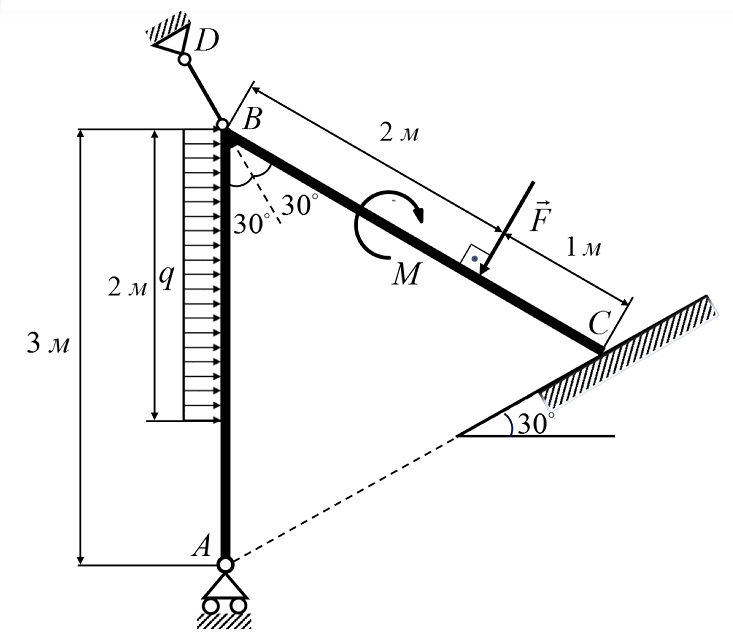
Найти реакции подвижного шарнира в точке A, стержня BD в точке B и поверхности в точке C.
F = 4 кН; q = 1,5 кН/м; M = 9 кН∙м
|
Теоретическая механика |
|
|
300₽ |
|
|
8938 |

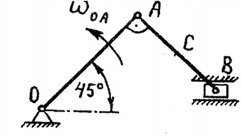
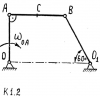
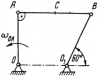
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
Для заданного положения механизма найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис. K1.l.
OA = 40 см = 0,40 м; AB = 30 см = 0,30 м; AC = 15 см = 0,15 м; ωOA = 2 c-1.
|
Теоретическая механика |
K6.1 |
Теоретическая механика 2 |
300₽ |
|
|
11078 |
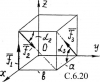
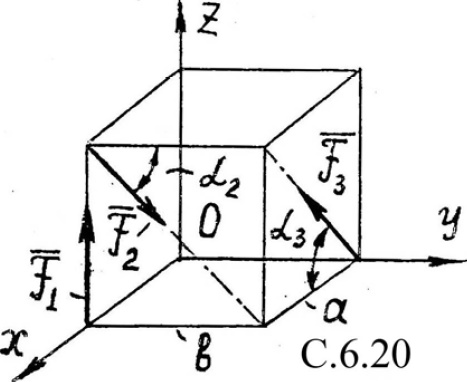
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллелепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C6.20 |
Теоретическая механика 2 |
300₽ |
|
|
14694 |
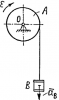
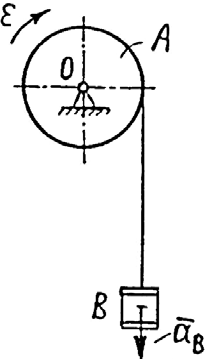
На однородный цилиндр A массой m1 намотана нить, на которой подвешен груз B массой m2. Определить давление цилиндра на ось, если груз опускается по вертикали из состояния покоя с ускорением a = 0,3g.
|
Теоретическая механика |
Д4.11 |
Теоретическая механика 2 |
300₽ |
|
|
8528 |

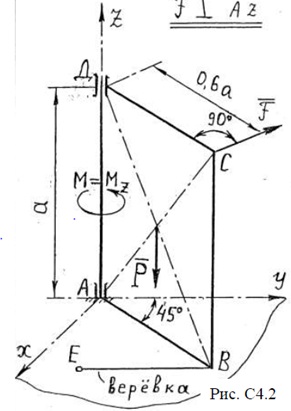
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунках С4.2.
|
Теоретическая механика |
C4.2_1 |
Теоретическая механика |
300₽ |
|
|
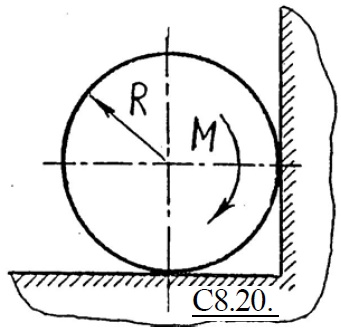
11158 |
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
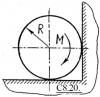
Расчетные схемы даны на рис. С8.20. Цилиндр радиуса R и весом P лежит на шероховатой плоскости и упирается в шероховатую стену. При каком моменте М пары сил, приложенных к цилиндру, он будет находиться в равновесии? Коэффициент трения скольжения цилиндра по плоскости равен f.
|
Теоретическая механика |
C8.20 |
Теоретическая механика 2 |
300₽ |
|
|
8612 |

ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
На рис. К3.13 показана схема механизма, причем
О1А = L1 = 0,4 м;
АВ = L2 = 1,4 м;
ДE = L3 = 1,2 м;
O2В = L4 = 0,6 м;
АД = ДВ.
Ползун в данном положении механизма имеет скорость VB = 4 м/с и ускорение aB = 6 м/с2. Для заданного положения механизма построить мгновенные центры скоростей шатунов АВ и ДЕ, найти скорости точек А, Д, Е, угловые скорости указанных шатунов и кривошипа О1А, а также ускорение точки А.
|
Теоретическая механика |
K5.13 |
Теоретическая механика 2 |
300₽ |
|
|
11238 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х=х(t), у=у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.20 |
4t - 5t2 |
2t |
2 |
|
Теоретическая механика |
K1.20 |
Теоретическая механика 2 |
300₽ |
|
|
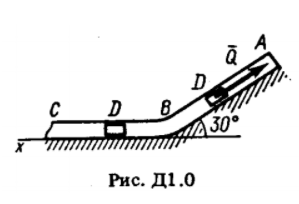
10604 |
ДИНАМИКА
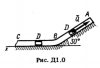
Груз D массой т, получив в точке A начальную скорость v0, движется по изогнутой трубе ABC, расположенной в вертикальной плоскости; участки трубы оба наклонные. На участке AB на груз кроме силы тяжести действуют сила Q (её направление показано на рисунках) и сила сопротивления R, зависящая от скорости v груза D: R = 0.8∙v2.
В точке B груз, не изменяя значения своей скорости, переходит на участок BC трубы, где на него кроме силы тяжести действует переменная сила F, проекция которой Fx на ось x задана в таблице: F = 4∙sin(4∙t).
Считая груз D материальной точкой, и зная расстояние AB или время t, движения груза от точки A до точки B, найти уравнение х = х(t) движения груза на участке BC.
Варианты расчетных схем изображены на рис. Д1.4.
Варианты числовых значений параметров приведены в табл. Д1.
| Вариант |
m, кг |
v0, м/с |
Q, Н |
R, Н |
l, м |
t1, c |
Fx, Н |
| 3 |
1,8 |
24 |
5 |
0,3∙v |
- |
2 |
-2∙cos(2∙t) |
|
Теоретическая механика |
|
Теоретическая механика |
300₽ |
|
|
13336 |
Шар массой m1, летящий со скоростью v1, сталкивается с неподвижным шаром массой m2. После удара шары разлетаются под углом α друг к другу. Удар абсолютно упругий, столкновение происходит в горизонтальной плоскости. Найти скорости шаров u1 и u2 после удара.
| № варианта |
m1, v1, m2, α |
| 8 |
m1 = 100 г, v1 = 10 м/с, m2 = 180 г, α = 125° |
|
ФИЗИКА |
3-3-8 |
ТГУ. Практические занятия по физике. 2019 год |
300₽ |
|
|
11014 |
ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. C5.8 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| C5.8 |
3, 8, 6 |
1, 2 |
140 |
90 |
|
Теоретическая механика |
C5.8 |
Теоретическая механика 2 |
300₽ |
|
|
16766 |
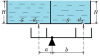
Два бака, каждый площадью сечения S = 1 м2, имеют отверстия, выполненные на дне, через которые вода попадает в две одинаковые ёмкости объёмом по 100 л каждая, установленные на весах. Отверстие в первом баке имеет диаметр d1 = 5 см.
Какой диаметр отверстия должен быть во втором баке, чтобы к концу заполнения одного из резервуаров создалось равновесие на весах? Сколько времени для этого потребуется? Какие уровни установятся в этот момент в баках? Отверстия в баках считать малыми в тонкой стенке при полном совершенном сжатии вытекающего потока воды
H = 1м; a = 0,5 м; b = 4 м
|
Гидростатика |
|
|
300₽ |
|