|
11156 |
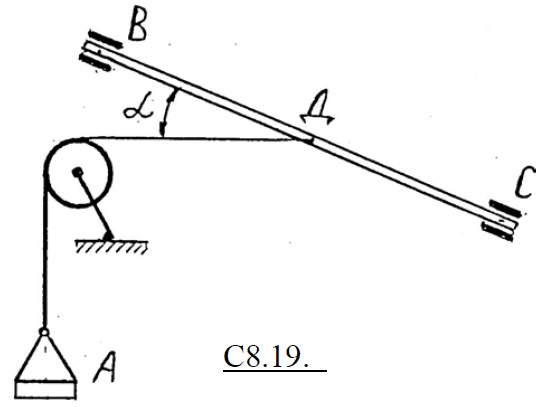
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
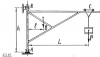
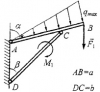
Расчетные схемы даны на рис. С8.19. Определить наибольший вес Qmax груза A, при котором возможно равновесие однородной балки ВС весом P. Коэффициент трения между балкой BC и втулкой B равен f; трение во втулке C не учитывать. Угол наклона балки к горизонту равен α; BD=DC.
|
Теоретическая механика |
C8.19 |
Теоретическая механика 2 |
300₽ |
|
|
5059 |
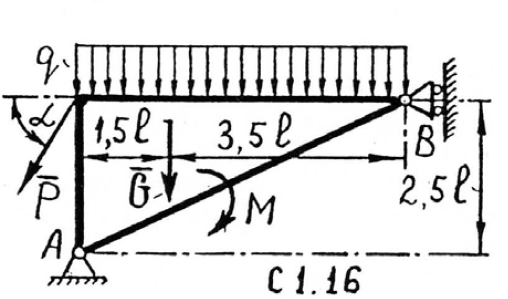
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции. Схемы конструкций указаны на рисунке С1.16, исходные данные приведены в таблице.
| Номер варианта |
P, кН |
G, кН |
M, кНм |
q, кН/м |
l, м |
α, град. |
| C1.16 |
6 |
9 |
3 |
5 |
2 |
60° |
|
Теоретическая механика |
C1.16 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
12394 |

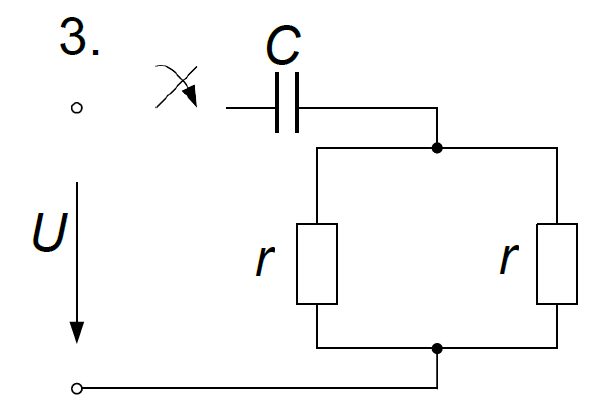
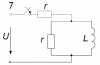
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 0 |
50 |
30 |
- |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
106 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
11236 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.19 |
2sin(πt/6) - 3 |
3cos(πt/6) |
2 |
|
Теоретическая механика |
K1.19 |
Теоретическая механика 2 |
300₽ |
|
|
12474 |
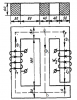
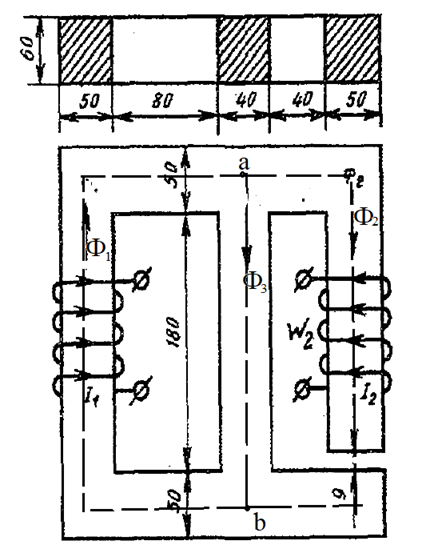
РАСЧЁТ РАЗВЕТВЛЕННОЙ МАГНИТНОЙ ЦЕПИ ПРИ ПОСТОЯННЫХ ТОКАХ
Для магнитной цепи (рис. 5) выполнить следующее:
1. Начертить схему замещения магнитной цепи, указав на ней направления магнитных потоков и магнитодвижущих сил (МДС);
2. Составить для магнитной цепи уравнения по законам Кирхгофа;
3. Определить магнитные потоки в стержнях и значение магнитной индукции в воздушном зазоре.
Размеры магнитопровода на рис. 5 даны в мм. Магнитопровод выполнен из электротехнической стали, кривая намагничивания которой представлена в табл. 2. Величины токов и число витков обмотки для каждого варианта даны в табл. 3.
Таблица 2
| В, Тл |
0 |
0,5 |
0,7 |
0,9 |
1,0 |
1,1 |
1,2 |
1,3 |
1,4 |
1,6 |
1,7 |
1,75 |
| Н, А/м |
0 |
100 |
140 |
200 |
250 |
350 |
500 |
700 |
1000 |
1800 |
2500 |
3000 |
Таблица 3
| Предпоследняя цифра студента |
I1, А |
w1, витков |
w2, витков |
I2, А |
| 4 |
35 |
350 |
25 |
80 |
|
Электротехника |
246 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
11012 |

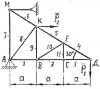
ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. C5.7 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| C5.7 |
1, 9, 3 |
4, 5 |
150 |
120 |
|
Теоретическая механика |
C5.7 |
Теоретическая механика 2 |
300₽ |
|
|
9022 |
СТАТИКА
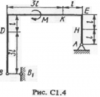
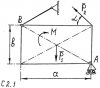
Жесткая рама (рис C1.4, табл. C1) закреплена в точке A шарнирно, а в точке B прикреплена или к невесомому стержню BB1, или к шарнирной опоре на катках, стержень прикреплен к раме и к неподвижной опоре шарнирами
На раму действуют пара сил с моментом M = 100 Н∙м и две силы, значения которых, направления и точки приложения указаны в таблице (например, в условиях № 1 на раму действуют сила F1 = 10 Н под углом 30° горизонтальной оси, приложенная в точке K, и сила F4 = 40 Н под углом 60° к горизонтальной оси, приложенная в точке H).
Определить реакции связей в точках A и B, вызываемые заданными нагрузками. При окончательных подсчетах принять l = 0,5 м.
|
Теоретическая механика |
C1.4 |
Теоретическая механика |
300₽ |
|
|
11092 |
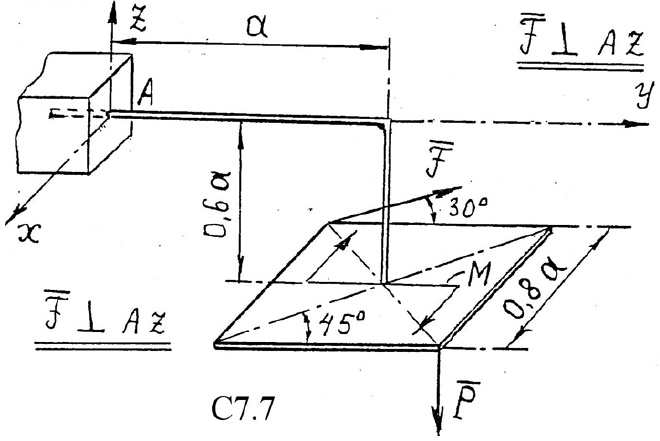
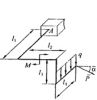
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунке.
|
Теоретическая механика |
C7.7 |
Теоретическая механика 2 |
300₽ |
|
|
3292 |
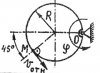
 Груз массы m2 поднимают вверх при помощи троса и лебедки, к барабану которой приложена пара сил с моментом М. Найти уравнение движения груза, если в начальный момент он был неподвижен. Момент пары сил выражается зависимостью M = M0 + α∙t (α = const), причем M0 = m2∙g∙R, где R - радиус барабана. Груз массы m2 поднимают вверх при помощи троса и лебедки, к барабану которой приложена пара сил с моментом М. Найти уравнение движения груза, если в начальный момент он был неподвижен. Момент пары сил выражается зависимостью M = M0 + α∙t (α = const), причем M0 = m2∙g∙R, где R - радиус барабана.
|
Теоретическая механика |
D5.7 |
Теоретическая механика |
300₽ |
|
|
12330 |
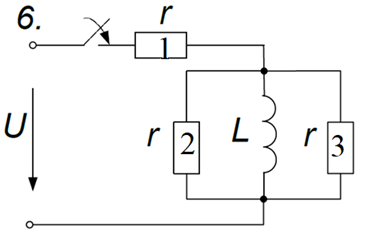
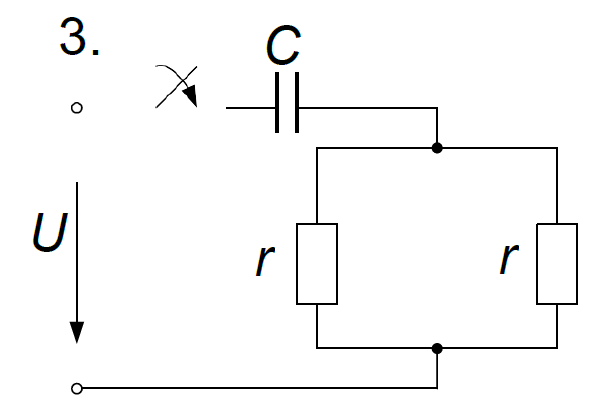
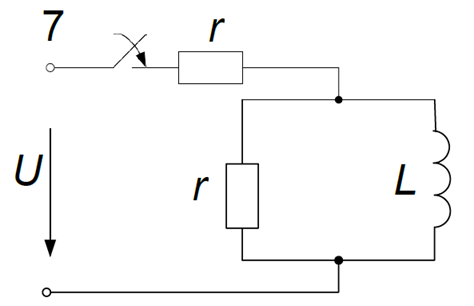
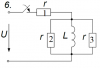
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 2 |
250 |
- |
120 |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
123 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
11172 |

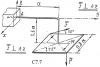
ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ОДНОРОДНОГО ТЕЛА
Найти положение центра тяжести плоской фермы, пластинки и объемного тела. Ферма состоит из однородных стержней; пластинка имеет малую постоянную толщину. Схемы тел показаны на рис. C9.7. Размеры ферм даны в метрах, остальных тел - в сантиметрах.
|
Теоретическая механика |
C9.7 |
Теоретическая механика 2 |
300₽ |
|
|
5069 |
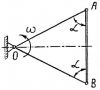
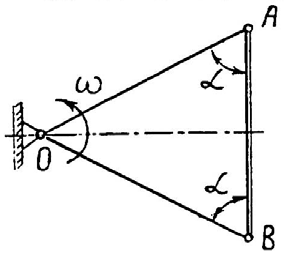
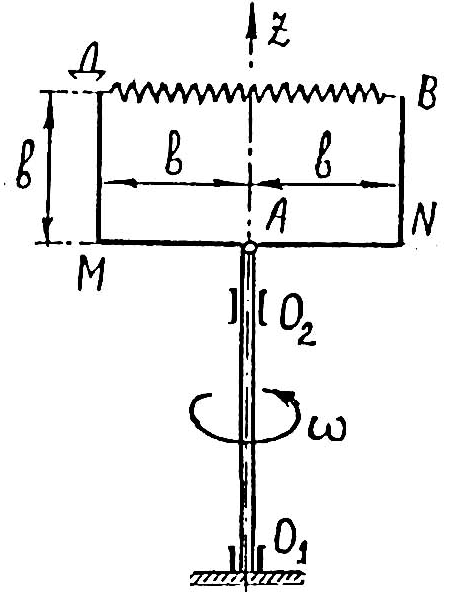
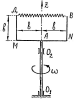
ПРИНЦИП ДАЛАМБЕРА
Тонкий однородный стержень АВ массой m, расположенный в горизонтальной плоскости, вращается с постоянной угловой скоростью ω вокруг вертикальной оси О, с которой он скреплен одинаковыми невесомыми стержнями ОА и ОВ длиной l. Определить реакции этих стержней
|
Теоретическая механика |
Д6.6 |
Теоретическая механика 2 |
300₽ |
|
|
12410 |
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 8 |
20 |
80 |
- |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
186 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
11586 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у=у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 4.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| 5 |
7t2 - 3 |
5t |
1/4 |
|
Теоретическая механика |
5 |
|
300₽ |
|
|
10948 |

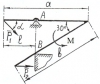
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. C4.17, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| C4.17 |
4 |
3.6 |
4 |
1.0 |
2.2 |
1.2 |
60° |
|
Теоретическая механика |
C4.17 |
Теоретическая механика 2 |
300₽ |
|
|
9754 |

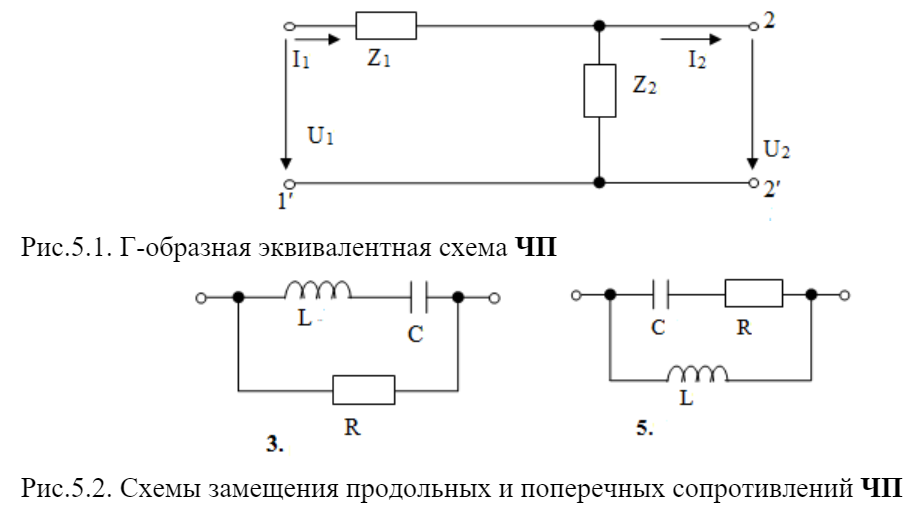
ЗАДАНИЕ № 3 «РАСЧЕТ ЧЕТЫРЁХПОЛЮСНИКА»
На рис. 5.1 представлена Г-образная эквивалентная схема четырёхполюсника (ЧП), где Z1 – продольное сопротивление, Z2 – поперечное сопротивление.
Выполнить следующее:
1) начертить исходную схему ЧП;
2) свести полученную схему ЧП к Г-образной эквивалентной схеме ЧП, заменив трёхэлементные схемы замещения продольного и поперечного сопротивлений двухэлементными схемами: Z1 = R1 + jX1, Z2 = R2 + jX2. Дальнейший расчёт вести для эквивалентной схемы;
3) определить коэффициенты A – формы записи уравнений ЧП;
4) определить сопротивления холостого хода и короткого замыкания со стороны первичных (11’) и вторичных выводов (22’):
а) через A – параметры;
б) непосредственно через продольное и поперечное сопротивления для режимов холостого хода и короткого замыкания на соответствующих выводах;
5) определить характеристические сопротивления для выводов 11’ и 22’ и постоянную передачи ЧП;
6) определить комплексный коэффициент передачи по напряжению и передаточную функцию ЧП;
Таблица 5.1. Параметры элементов продольного и поперечного сопротивлений ЧП
| Номер строки |
R, Ом |
L, мГ |
C, мкФ |
f0, кГц |
| 2 |
30 |
5 |
5 |
30 |
|
Электротехника |
235.3 |
|
300₽ |
|
|
11028 |
ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. C5.15 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| C5.15 |
2, 11, 4 |
6, 7 |
90 |
140 |
|
Теоретическая механика |
C5.15 |
Теоретическая механика 2 |
300₽ |
|
|
11108 |

ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунке.
|
Теоретическая механика |
C7.15 |
Теоретическая механика 2 |
300₽ |
|
|
12346 |
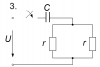
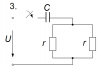
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 3 |
20 |
- |
40 |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
133 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
11188 |
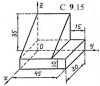
ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ОДНОРОДНОГО ТЕЛА
Найти положение центра тяжести плоской фермы, пластинки и объемного тела. Ферма состоит из однородных стержней; пластинка имеет малую постоянную толщину. Схемы тел показаны на рис. C9.15. Размеры ферм даны в метрах, остальных тел - в сантиметрах.
|
Теоретическая механика |
C9.15 |
Теоретическая механика 2 |
300₽ |
|
|
5093 |
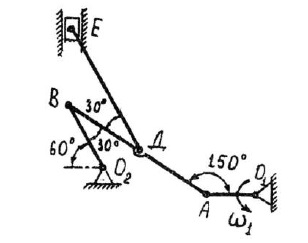
 ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
На рис. К3.9 показана схема механизма, причем
О1А = L1 = 0,4 м;
АВ = L2 = 1,4 м;
ДE = L3 = 1,2 м;
O2В = L4 = 0,6 м;
АД = ДВ.
Кривошип O1А вращается вокруг оси O1 с постоянной угловой скоростью ω1 = ωOA = 4 с-1. Для заданного положения механизма построить мгновенные центры скоростей шатунов АВ и ДЕ, найти скорости точек А, В, Д, Е, угловые скорости указанных шатунов и кривошипа О2В, а также ускорение точки В.
|
Теоретическая механика |
K5.9 |
Теоретическая механика 2 |
300₽ |
|
|
12426 |
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 6 |
10 |
20 |
- |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
167 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
10888 |
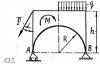
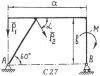
ОПРЕДЕЛЕНИЕ РЕАКЦИИ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Схемы конструкций построены на рис. СЗ. 1 - С3.20. Симметричная арка весом 50 кН нагружена сосредоточенной силой P, распределенной нагрузкой интенсивности q и парой сил с моментом M. Найти давление арки на опоры. P = 50 кН; q = 8 кН/м; М = 40 кН∙м; R = 4 м; h = 7 м; α = 45°
|
Теоретическая механика |
C3.7. |
Теоретическая механика 2 |
300₽ |
|
|
14042 |

Для определения момента трения в цапфах на вал насажен маховик массой М, радиус инерции маховика равен р. Маховику сообщена начальная угловая скорость ω0; предоставленный самому себе, он остановился через Т[с] . Определить момент трения, считая его постоянным
|
Теоретическая механика |
Д5.14 |
Теоретическая механика 2 |
300₽ |
|
|
8492 |
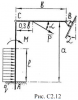
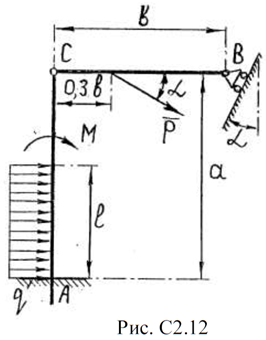
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. С2.12, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С2.12 |
7 |
4.8 |
2 |
1.5 |
3.0 |
1.3 |
30° |
|
Теоретическая механика |
C2.12_1 |
Теоретическая механика |
300₽ |
|
|
13332 |
Шар массой m1, летящий со скоростью v1, сталкивается с неподвижным шаром массой m2. После удара шары разлетаются под углом α друг к другу. Удар абсолютно упругий, столкновение происходит в горизонтальной плоскости. Найти скорости шаров u1 и u2 после удара.
| № варианта |
m1, v1, m2, α |
| 6 |
m1 = 110 г, v1 = 10 м/с, m2 = 130 г, α = 150° |
|
ФИЗИКА |
3-3-6 |
ТГУ. Практические занятия по физике. 2019 год |
300₽ |
|
|
8596 |
ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Диск турбины вращается вокруг неподвижной оси по закону φ = At2 + Bt, где φ задан в радианах, а время t - в секундах; A и B – постоянные коэффициенты. Остановка диска турбины произошла через 2 мин после ее отключения. Угловая скорость диска в момент времени t1 = 60 c имела значение ω1 = 120 c-1. Найти скорость и ускорение точки диска, отстоящей от оси вращения на 10 см, в момент времени t2 = 90 с.
|
Теоретическая механика |
K4.19 |
Теоретическая механика 2 |
300₽ |
|
|
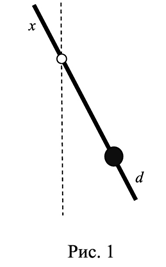
16585 |

Физический маятник представляет собой тонкий однородный стержень длиной l = 1 м и массой m, на котором жестко закреплена материальная точка массой M на расстоянии d (d < l/2) от нижнего конца стержня. Точка подвеса маятника находится на расстоянии x (x < l/2) от верхнего конца стержня (рис. 1). Найти зависимость периода малых колебаний T маятника от расстояния x и построить график этой зависимости T(x) в интервале изменения x от 0 до l/2. Определить по графику минимальное значение периода T колебаний маятника. Ускорение свободного падения g = 9,81 м/c2.
| № варианта |
d, M/m |
| 3 |
d = 0,2 м, M/m = 1,0 |
|
Механика |
|
|
300₽ |
|
|
14704 |
Тонкий однородный стержень массой m и длиной l может вращаться без трения вокруг горизонтальной оси О. В начальный момент стержень отведён в горизонтальное положение и падает без начальной скорости. Определить горизонтальную и вертикальную составляющую реакции шарнира O в функции угла φ, угловой скорости и углового ускорения стержня.
|
Теоретическая механика |
Д4.5 |
Теоретическая механика 2 |
300₽ |
|
|
8686 |
ПРИНЦИП ДАЛАМБЕРА
Тонкие однородные стержни АВС и АДЕ одинаковой массы m, изогнутые под прямым углом, соединены в точке А шарниром. Стержни вращается вокруг вертикальной оси Оу с постоянной угловой скоростью ω. При этом они удерживаются в положении, при котором части ВС и ДЕ параллельны, а АВ и АД перпендикулярны оси вращения, при помощи пружины СЕ. Определить усилие в пружине.
|
Теоретическая механика |
Д6.1 |
Теоретическая механика 2 |
300₽ |
|
|
13968 |
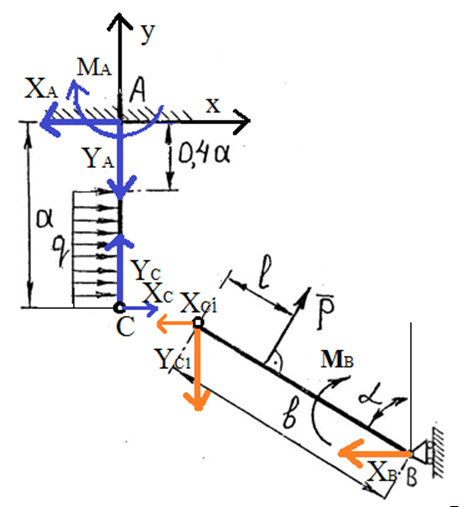
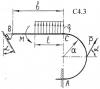
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. С4.1 – С4.20, исходные данные указаны в табл. 3
Определить реакции изогнутой балки АВС, находящейся под действием плоской системы сил. Вычисление реакций выполнить при l = 1,2 м, α = 60°, Р = 4 кН, МB = 3,6 кН∙м, q = 4 кН/м, a=1,0 м, b = 2.2 м
|
Теоретическая механика |
С4-17 |
Теоретическая механика |
300₽ |
|
|
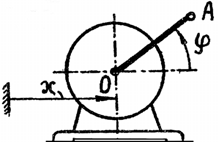
5106 |
К валу электромотора, вращающемуся согласно уравнению $\varphi = \omega t$, прикреплен под прямым углом стержень ОА длиной l. Электромотор, установленный без креплений, совершает гармонические колебания по закону $x = b \cos \omega t$. Определить абсолютную скорость точки А стержня в момент времени $t_1 = \frac{\pi}{2\omega}$.
|
Теоретическая механика |
K7.10 |
Теоретическая механика 2 |
300₽ |
|
|
10904 |
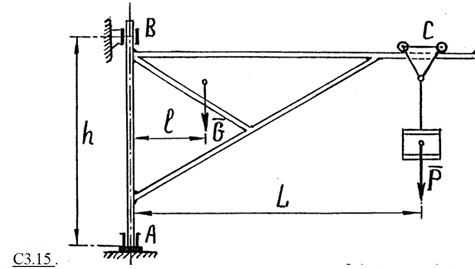
ОПРЕДЕЛЕНИЕ РЕАКЦИИ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Схемы конструкций построены на рис. СЗ. 1 - С3.20. Кран весом G имеет вертикальную ось вращения AB. Расстояние AB = h = 5 м, центр тяжести крана отстоит от оси AB на расстоянии l = 2 м, тележка C несет груз весом Р. Определить реакции подшипника B и подпятника A крана.
G = 8 кН; Р = З кН; L = 5 м.
|
Теоретическая механика |
C3.15. |
Теоретическая механика 2 |
300₽ |
|
|
8508 |
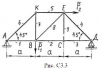
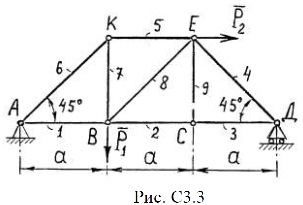
ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. С3.3 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| С3.3 |
2, 9, 4 |
1, 6 |
60 |
70 |
|
Теоретическая механика |
C3.3_1 |
Теоретическая механика |
300₽ |
|
|
13348 |
Шар массой m1, летящий со скоростью v1, сталкивается с неподвижным шаром массой m2. После удара шары разлетаются под углом α друг к другу. Удар абсолютно упругий, столкновение происходит в горизонтальной плоскости. Найти скорости шаров u1 и u2 после удара.
| № варианта |
m1, v1, m2, α |
| 14 |
m1 = 250 г, v1 = 10 м/с, m2 = 150 г, α = 45° |
|
ФИЗИКА |
3-3-14 |
ТГУ. Практические занятия по физике. 2019 год |
300₽ |
|
|
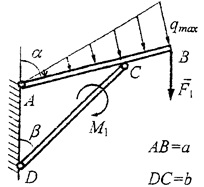
6367 |
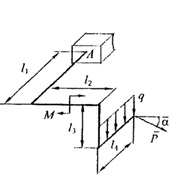
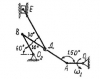
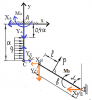
ПРОСТРАНСТВЕННАЯ СИСТЕМА СИЛ
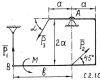
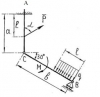
Изогнутая под прямыми углами пространственная рама концом А заделана в неподвижную опору и нагружена равномерно распределенной нагрузкой интенсивностью q или линейное I распределенной нагрузкой с максимальной интенсивностью qmax, парой сил с моментом M и силой P, расположенной в плоскости перпендикулярной участку рамы длиной l4 и образующей угол α с прямой изображенной на рисунке.
Определить опорные реакции рамы.
Варианты расчетных схем изображены па рисунке.
Номер на рисунке соответствует варианту задания. Числовые значения параметров приведены в таблице.
| Номер варианта |
P, Н |
M, Н∙м |
q, Н/м |
l1, м |
l2, м |
l3, м |
l4, м |
α, ° |
| 6 |
700 |
400 |
1000 |
1,6 |
1 |
1,2 |
1,2 |
-30 |
|
Теоретическая механика |
|
|
300₽ |
|
|
8612 |

ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
На рис. К3.13 показана схема механизма, причем
О1А = L1 = 0,4 м;
АВ = L2 = 1,4 м;
ДE = L3 = 1,2 м;
O2В = L4 = 0,6 м;
АД = ДВ.
Ползун в данном положении механизма имеет скорость VB = 4 м/с и ускорение aB = 6 м/с2. Для заданного положения механизма построить мгновенные центры скоростей шатунов АВ и ДЕ, найти скорости точек А, Д, Е, угловые скорости указанных шатунов и кривошипа О1А, а также ускорение точки А.
|
Теоретическая механика |
K5.13 |
Теоретическая механика 2 |
300₽ |
|
|
8342 |
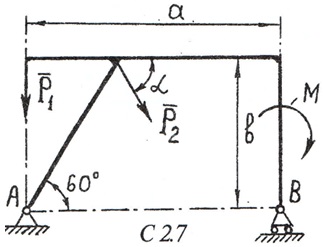
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.7 -исходные данные приведены в таблице 2.
Таблица 2
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С2.7 |
8 |
9 |
4 |
2,4 |
1,4 |
- |
60° |
|
Теоретическая механика |
C2.7 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
10840 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.17, -исходные данные приведены в таблице 2.
| Номер варианта |
Р1, кН |
P2, кН |
P3, кН |
M кН∙м |
a, м |
b, м |
α, град |
| С-2.1. |
6 |
8 |
0 |
3 |
1.4 |
0.8 |
45° |
|
Теоретическая механика |
C2.1. |
Теоретическая механика 2 |
300₽ |
|
|
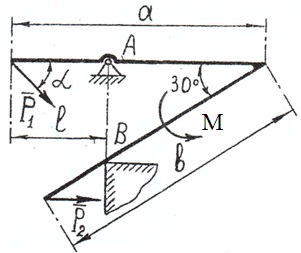
8426 |
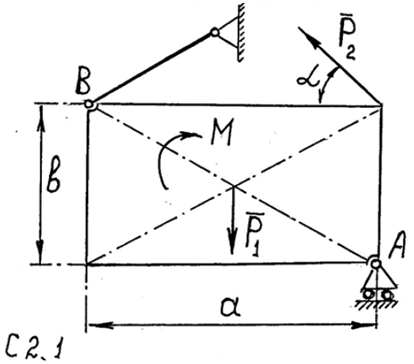
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.15, -исходные данные приведены в таблице 2.
Таблица 2
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С-2.15 |
9 |
7 |
5 |
2.6 |
2.6 |
1 |
45° |
|
Теоретическая механика |
C2.15 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
5115 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 4.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.15 |
6∙sin(2πt) |
4∙cos(2πt) |
2/3 |
|
Теоретическая механика |
K1.15_1 |
Теоретическая механика |
300₽ |
|
|
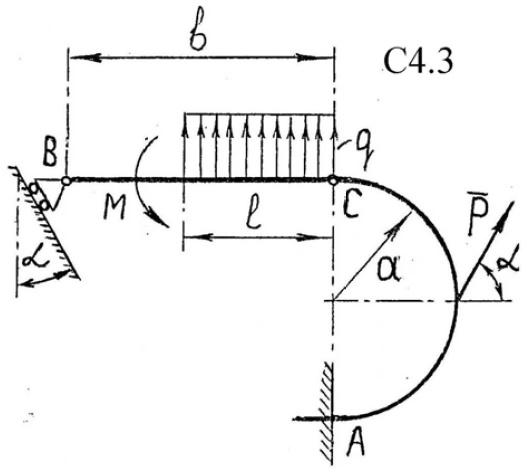
10920 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. C4.3, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| C4.3 |
3 |
4.8 |
2 |
2.8 |
1.5 |
1.2 |
30° |
|
Теоретическая механика |
C4.3 |
Теоретическая механика 2 |
300₽ |
|
|
8524 |
ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. С3.16 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| С3.19 |
7, 10, 2 |
5, 4 |
170 |
200 |
|
Теоретическая механика |
C3.19-20 |
Теоретическая механика |
300₽ |
|
|
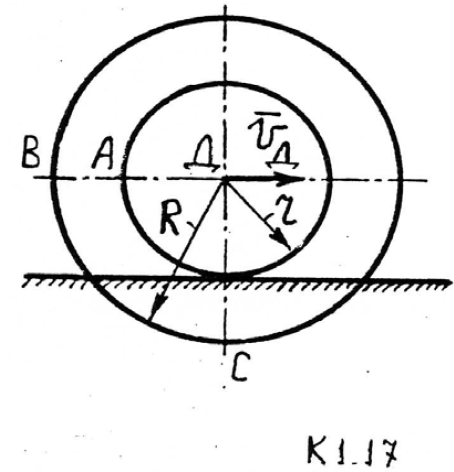
8928 |
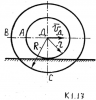
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис.
AB = R = 10 см; r = 15 см; R = 25 см; vA = 25 см/с.
|
Теоретическая механика |
K1.17. |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
14572 |

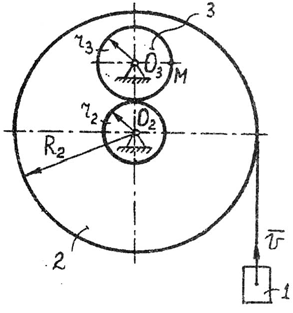
ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.7 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.7 |
Теоретическая механика 2 |
300₽ |
|
|
6491 |
СОЧЛЕНЕННАЯ СИСТЕМА ТЕЛ
Сочлененная система, состоит из двух стержней, соединенных неподвижным цилиндрическим шарниром либо свободно опирающихся друг на друга, и имеет внешние опоры, изображенные на рисунке. Внешние опоры могут содержать жесткую заделку, неподвижный цилиндрический шарнир, невесомый стержень или нить, подвижную опору. Система нагружена равномерно распределенной нагрузкой интенсивностью q и (или) линейно распределенной нагрузкой с максимальной интенсивностью qmax, парой сил с моментом М1 и силой F1. Определить реакции внешних и внутренних связей, наложенных на перемещения точек заданной системы тел.
| Номер варианта |
№ Дано |
a, м |
b, м |
c, м |
d, м |
M1, кНм |
F1, Н |
qm, Н/м |
q, Н/м |
α, ° |
β, ° |
γ, ° |
| 18 |
5 |
7 |
4 |
- |
- |
20 |
20 |
6 |
- |
45 |
30 |
- |
|
Теоретическая механика |
|
|
300₽ |
|
|
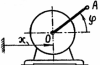
8628 |
Точка М движется по ободу диска радиуса R = 0,3 м со скоростью vотн = 4 м/с . Определить абсолютную скорость точки М в указанном положении, если закон вращения диска φ = 2t2 рад.
|
Теоретическая механика |
K7.11 |
Теоретическая механика 2 |
300₽ |
|
|
10856 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.10, -исходные данные приведены в таблице 2.
| Номер варианта |
Р1, кН |
P2, кН |
P3, кН |
M кН∙м |
a, м |
b, м |
α, град |
| С-2.10. |
4 |
5 |
6 |
3 |
0.4 |
1.1 |
60° |
|
Теоретическая механика |
C2.10. |
Теоретическая механика 2 |
300₽ |
|
|
8446 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. С2.2, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С2.2 |
6 |
4 |
2 |
1.3 |
2.5 |
1 |
60° |
|
Теоретическая механика |
C2.2_1 |
Теоретическая механика |
300₽ |
|
|
11242 |
КИНЕМАТИКА ТОЧКИ
Точка М движется по окружности радиуса R согласно уравнению S = S(t). Определить и построить для момента времени t1 скорость, касательное, нормальное и полное ускорение этой точки. Исходные данные для расчета приведены в табл. 2.
| № варианта |
S = S(t), cм |
R, см |
Время t1, с |
| К2.2 |
5sin(πt/6) |
2,5 |
4 |
|
Теоретическая механика |
K2.2 |
Теоретическая механика 2 |
300₽ |
|