|
11162 |
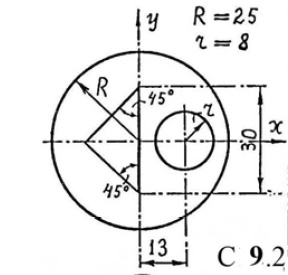
ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ОДНОРОДНОГО ТЕЛА
Найти положение центра тяжести плоской фермы, пластинки и объемного тела. Ферма состоит из однородных стержней; пластинка имеет малую постоянную толщину. Схемы тел показаны на рис. C9.2. Размеры ферм даны в метрах, остальных тел - в сантиметрах.
|
Теоретическая механика |
C9.2 |
Теоретическая механика 2 |
300₽ |
|
|
12400 |
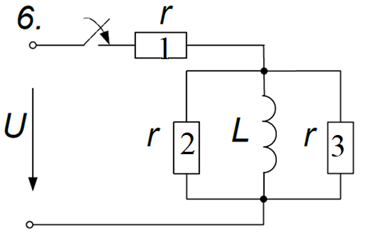
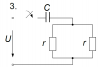
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 3 |
20 |
250 |
- |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
136 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
8378 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = 3∙cos(πt). у = 4∙sin(πt). найти траекторию точки, а также для заданного момента времени t1 =5/6 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 4.
| Номер варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| K1.2 |
3∙cos(πt) |
4∙sin(πt) |
5/6 |
|
Теоретическая механика |
K1.2_1 |
Теоретическая механика |
300₽ |
|
|
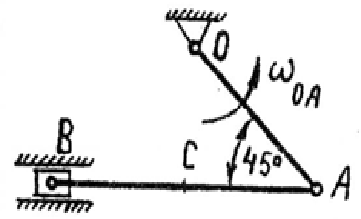
12480 |
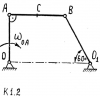
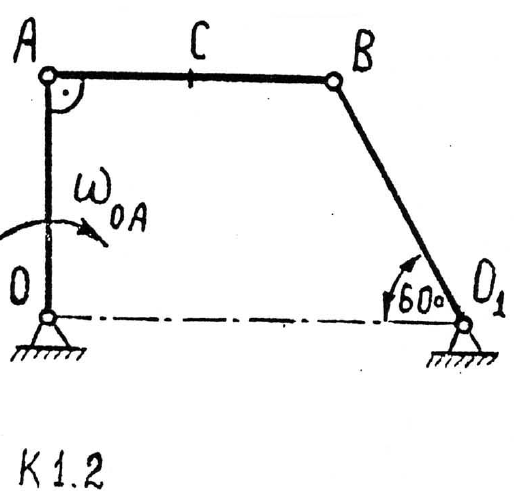
Для заданного механизма найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки.
OA = 30 см = 0,30 м; AB = 40 см = 0,40 м; AC = 20 см = 0,20 м; ωOA = 2 c-1.
|
Теоретическая механика |
K1.2 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
8476 |
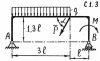
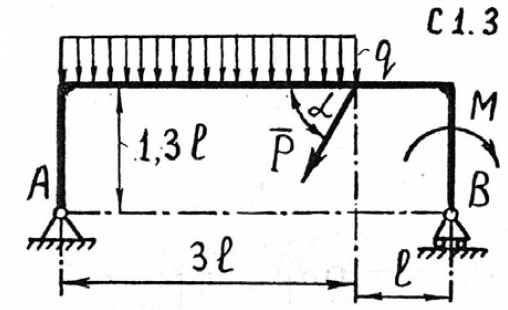
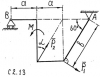
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. С 1.13, исходные данные приведены в табл. 1.
| Номер варианта |
P, кН |
G, кН |
M, кНм |
q, кН/м |
l, м |
α, град |
| С1.3 |
8 |
- |
3 |
6 |
1 |
60° |
|
Теоретическая механика |
C1.3 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
10938 |
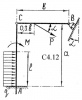
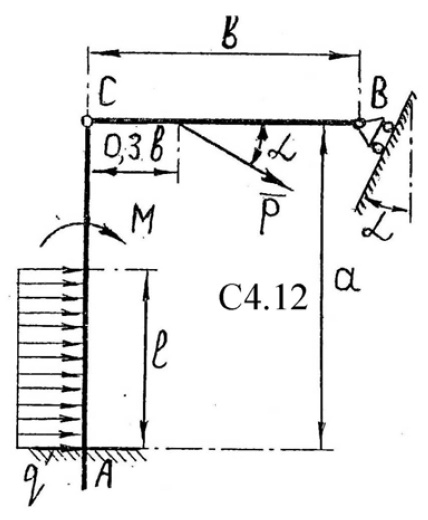
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. C4.12, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| C4.12 |
7 |
4.8 |
2 |
1.5 |
3.0 |
1.3 |
30° |
|
Теоретическая механика |
C4.12 |
Теоретическая механика 2 |
300₽ |
|
|
9744 |

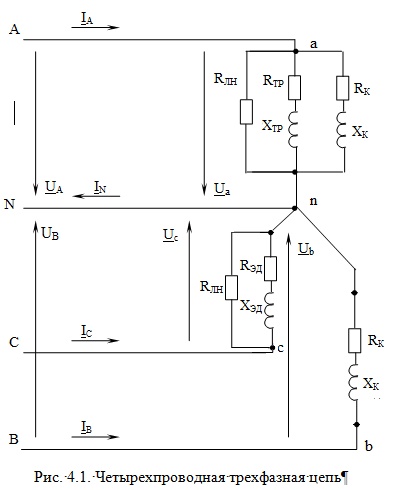
ЗАДАНИЕ № 2 «РАСЧЕТ ТРЁХФАЗНОЙ ЦЕПИ»
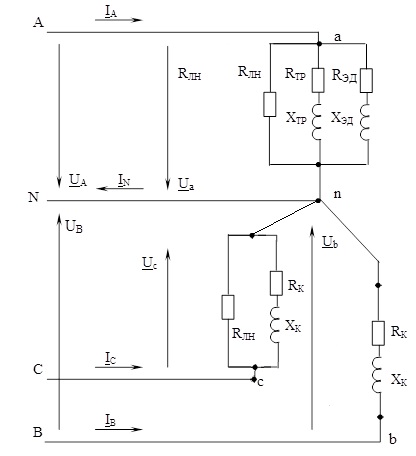
3.1. Внутри здания сети внутреннего электроснабжения выполнены по схеме "звезда" с нейтральным проводом. Отдельные помещения подключены к разным фазам трехфазного источника электроэнергии с линейным напряжением Uл = 380 В и частотой тока f = 50 Гц. На основании данных табл. 3.1 - 3.2 определить для своего варианта (последняя цифра трехзначного варианта из предыдущего задания – номер строки в табл. 3.2, предпоследняя цифра – номер строки в табл. 3.1) нагрузку каждой фазы, причем электропотребители в фазе включаются параллельно. Считая лампу накачивания (ЛН) активной нагрузкой, калорифер (К), электродвигатель (ЭД) и трансформатор (ТР) активно-индуктивной нагрузкой, начертить электрическую схему замещения рассчитываемой трехфазной цепи для своего варианта.
3.2. Выполнить анализ электрического состояния полученной в п. 3.1 схемы при наличии нейтрального провода:
1) определить активное, реактивное и полное сопротивления каждого электропотребителя;
2) рассчитать токи, протекающие через каждый электропотребитель (токи в параллельных ветвях каждой фазы);
3) определить для каждой фазы полное сопротивление, активную, реактивную и полную мощность, коэффициент мощности;
4) рассчитать линейные токи и ток в нейтральном проводе;
5) определить для всей трехфазной нагрузки активную PН, реактивную QH и полную SH мощности, коэффициент мощности cos φH и составить баланс мощностей;
6) построить в масштабе совмещенную векторную диаграмму напряжений и токов.
Таблица 3.1. Вид нагрузки в фазах
| Номер строки |
Электроприемники в фазах |
| Фаза A |
Фаза B |
Фаза C |
| 3 |
ЛН, ТР, К |
К |
ЛН, ЭД |
Таблица 3.2. Параметры нагрузки
| Номер строки |
ЛН |
К |
ТР |
Эд |
| PЛН |
PК |
cos φК |
SТР |
cos φТР |
PЭД |
КПД |
cos φЭД |
| 3 |
150 |
1500 |
0,96 |
1000 |
0,75 |
400 |
0,78 |
0,87 |
3.3. Примечания:
1. Для всех токов и напряжений определить действующее значение и начальную фазу.
2. На схеме замещения изображать активную нагрузку в виде резистора, активно-индуктивную нагрузку в виде последовательного соединения резистора и идеальной индуктивной катушки.
3. Баланс мощностей должен сойтись с погрешностью менее 1%.
|
Электротехника |
233.2 |
|
300₽ |
|
|
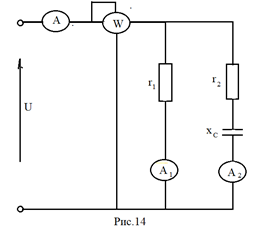
16725 |
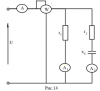
В сеть переменного тока напряжением U включена цепь, состоящая из двух параллельных ветвей с сопротивлением r1, r2 и xC (рис. 14, табл. 19). Определить показания измерительных приборов, реактивную мощность цепи, построить векторную диаграмму.
Таблица 19
| Номер варианта |
U, В |
r1, Ом |
r2, Ом |
xC, Ом |
| 1 |
127 |
5 |
3 |
4 |
|
Электротехника |
|
|
300₽ |
|
|
8560 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = x(t), у = y(t). найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 4.
| Номер варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| K1.5 |
2∙t |
t2 - 3 |
2 |
|
Теоретическая механика |
K1.5_1 |
Теоретическая механика |
300₽ |
|
|
11018 |
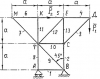
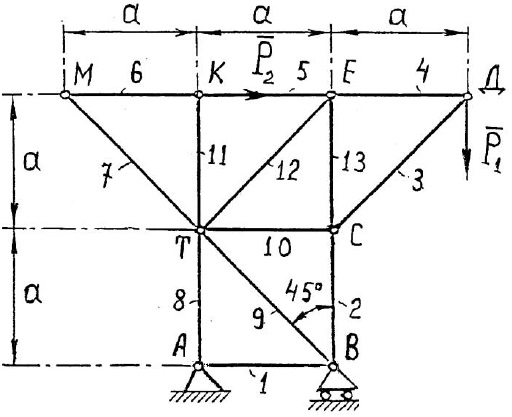
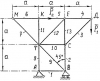
ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. C5.10 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| C5.10 |
7, 11, 5 |
1, 6 |
160 |
100 |
|
Теоретическая механика |
C5.10 |
Теоретическая механика 2 |
300₽ |
|
|
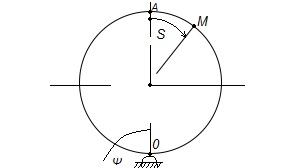
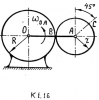
14188 |

Круглая пластина радиуса R = 0,5 (м) вращается вокруг неподвижной оси О по закону φ =4t2 - 5t (рад). По окружности пластины движется точка М. Закон ее относительного движения S = 5πt2 (м). Определить абсолютную скорость и абсолютное ускорение точки в момент времени t1 = 1 с. Показать на рисунках все векторы скоростей и ускорений.
|
Теоретическая механика |
D3.22 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
9028 |
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
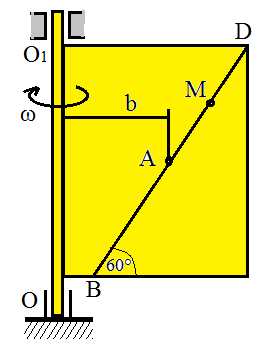
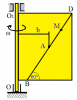
Прямоугольная пластина (рис К4.4) вращается вокруг неподвижной оси с постоянной угловой скоростью ω = -3 с-1 заданной в табл. К3 (при знаке минус направление ω противоположно показанному на рисунке). Ось вращения на рис K4.4 ось вращения OO1 лежит в плоскости пластины (пластина вращается в пространстве)
| № усл |
ω, с-1 |
Рис. 0-5 |
| b, см |
S = AM = f(t) |
| 4 |
-3 |
10 |
50∙(t3 - t) - 30 |
По пластине вдоль прямой BD (рис K4.4) движется точка M. Закон ее относительного движения, выражаемый уравнением $s=AM=50(t^3-t)-30$ (s — в сантиметрах, t — в секундах), задан в табл. K4 отдельно для рис. K4.4. На всех рисунках точка M показана в положении, при котором s = AM > 0 (при s > 0 точка М находится по другую сторону от точки А).
Определить абсолютную скорость и абсолютное ускорение точки M в момент времени t1 = 1 с.
|
Теоретическая механика |
K4.4. |
Теоретическая механика |
300₽ |
|
|
11098 |
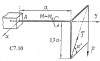
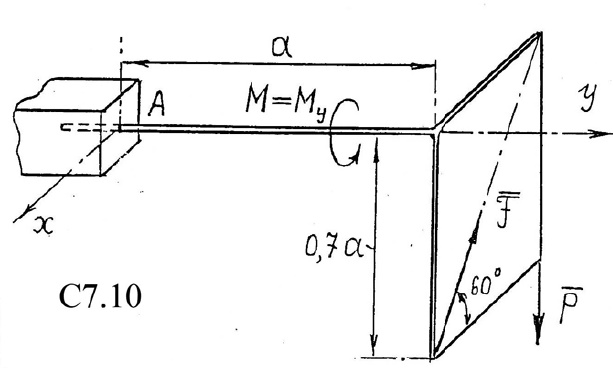
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунке.
|
Теоретическая механика |
C7.10 |
Теоретическая механика 2 |
300₽ |
|
|
12336 |
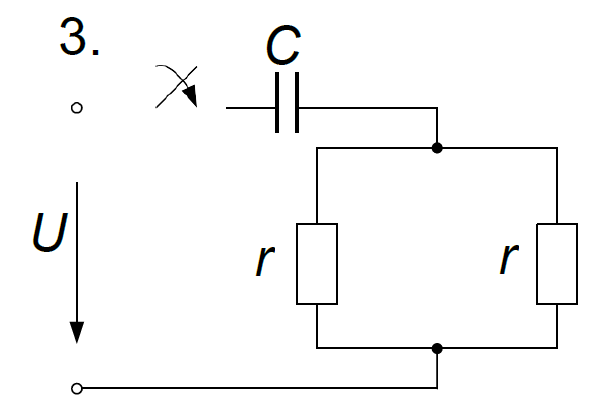
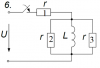
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 6 |
10 |
- |
150 |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
163 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
11178 |
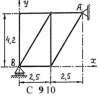
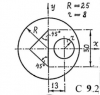
ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ОДНОРОДНОГО ТЕЛА
Найти положение центра тяжести плоской фермы, пластинки и объемного тела. Ферма состоит из однородных стержней; пластинка имеет малую постоянную толщину. Схемы тел показаны на рис. C9.10. Размеры ферм даны в метрах, остальных тел - в сантиметрах.
|
Теоретическая механика |
C9.10 |
Теоретическая механика 2 |
300₽ |
|
|
12416 |
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 1 |
15 |
120 |
- |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
117 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
14760 |
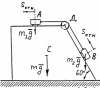
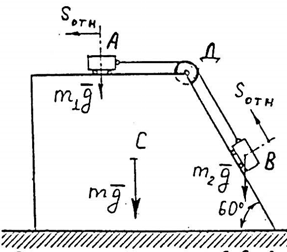
По призме C массой m = 7 кг могут двигаться тележки A и B массами m1 = 1 кг и m2 = 2 кг соответственно. Тележки связаны невесомой нитью, переброшенной через неподвижный блок Д. В начальный момент система находится в покое, затем тележка A начинает двигаться относительно призмы влево по закону Sотн = 5t3, м. Oпределить скорость призмы при t = 0,5 с.
|
Теоретическая механика |
Д9.8 |
Теоретическая механика 2 |
300₽ |
|
|
10878 |

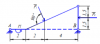
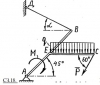
ОПРЕДЕЛЕНИЕ РЕАКЦИИ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Схемы конструкций построены на рис. СЗ. 1 - С3.20. К изогнутой балке ABC, удерживаемой в равновесии тросом, перекинутым через блок, приложены сита P, распределенная нагрузка интенсивности q и пара сил моментом M. Определить натяжение троса и реакцию шарнира A, полагая АД = ЕВ = a; ДЕ = ВС = 4а. P = 6 кН; q = 2 кН/м; М = 5 кН м; a = 2 м; α = 30°.
|
Теоретическая механика |
C3.2. |
Теоретическая механика 2 |
300₽ |
|
|
5101 |
 ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. С3.6 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| С3.10 |
7, 11, 5 |
1, 2 |
160 |
100 |
В задаче № С 3.10 нужно поменять местами подвижный и неподвижный шарнир.
|
Теоретическая механика |
C3.10_1 |
Теоретическая механика |
300₽ |
|
|
13322 |
Шар массой m1, летящий со скоростью v1, сталкивается с неподвижным шаром массой m2. После удара шары разлетаются под углом α друг к другу. Удар абсолютно упругий, столкновение происходит в горизонтальной плоскости. Найти скорости шаров u1 и u2 после удара.
| № варианта |
m1, v1, m2, α |
| 1 |
m1 = 100 г, v1 = 10 м/с, m2 = 150 г, α = 120° |
|
ФИЗИКА |
3-3-1 |
ТГУ. Практические занятия по физике. 2019 год |
300₽ |
|
|
8120 |

ЗАДАНИЕ № 2 «РАСЧЕТ ТРЁХФАЗНОЙ ЦЕПИ»
3.1. Внутри здания сети внутреннего электроснабжения выполнены по схеме "звезда" с нейтральным проводом. Отдельные помещения подключены к разным фазам трехфазного источника электроэнергии с линейным напряжением Uл = 380 В и частотой тока f = 50 Гц. На основании данных табл. 3.1 - 3.2 определить для своего варианта (последняя цифра трехзначного варианта из предыдущего задания – номер строки в табл. 3.2, предпоследняя цифра – номер строки в табл. 3.1) нагрузку каждой фазы, причем электропотребители в фазе включаются параллельно. Считая лампу накачивания (ЛН) активной нагрузкой, калорифер (К), электродвигатель (ЭД) и трансформатор (ТР) активно-индуктивной нагрузкой, начертить электрическую схему замещения рассчитываемой трехфазной цепи для своего варианта.
3.2. Выполнить анализ электрического состояния полученной в п. 3.1 схемы при наличии нейтрального провода:
1) определить активное, реактивное и полное сопротивления каждого электропотребителя;
2) рассчитать токи, протекающие через каждый электропотребитель (токи в параллельных ветвях каждой фазы);
3) определить для каждой фазы полное сопротивление, активную, реактивную и полную мощность, коэффициент мощности;
4) рассчитать линейные токи и ток в нейтральном проводе;
5) определить для всей трехфазной нагрузки активную PН, реактивную QН и полную SН мощности, коэффициент мощности cos φH и составить баланс мощностей;
6) построить в масштабе совмещенную векторную диаграмму напряжений и токов.
Таблица 3.1. Вид нагрузки в фазах
| Номер строки |
Электроприемники в фазах |
| Фаза A |
Фаза B |
Фаза C |
| 8 |
ЛН, ТР, ЭД |
К |
ЛН, К |
Таблица 3.2. Параметры нагрузки
| Номер строки |
ЛН |
К |
ТР |
Эд |
| PЛН |
PК |
cos φК |
SТР |
cos φТР |
PЭД |
КПД |
cos φЭД |
| 8 |
75 |
1600 |
0,96 |
160 |
0,5 |
400 |
0,70 |
0,75 |
3.3. Примечания:
1. Для всех токов и напряжений определить действующее значение и начальную фазу.
2. На схеме замещения изображать активную нагрузку в виде резистора, активно-индуктивную нагрузку в виде последовательного соединения резистора и идеальной индуктивной катушки.
3. Баланс мощностей должен сойтись с погрешностью менее 1%.
|
Электротехника |
|
|
300₽ |
|
|
10640 |
Определение реакций опор составной конструкции (система двух тел)
Найти реакции опор и давление в промежуточном шарнире составной конструкции. Схемы конструкций представлены на рис. 18-20 (размеры в метрах), нагрузка указана в табл. 4.
| Вариант |
G |
P |
M, кН∙м |
q, кН∙м |
| кН |
| 2 |
5 |
8 |
60 |
- |
|
Теоретическая механика |
|
|
300₽ |
|
|
14612 |
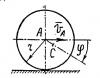
ПЛОСКО-ПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Для заданного положения механизма найти скорости точек В и С, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис. К6.1-К6.20
OA = 30 см = 0,30 м; AB = 50 см = 0,50 м; AC = 25 см = 0,25 м; ωOA = 3 c-1.
|
Теоретическая механика |
K6.7 |
Теоретическая механика 2 |
300₽ |
|
|
8586 |
ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Угол наклона полного ускорения точки обода махового колеса к радиусу равен 60°. Касательное ускорение точки в данный момент $a_\tau = 20 \sqrt 3$ м/с2. Найти нормальное и полное ускорение точки, отстоящей от оси вращения на расстоянии r = 0,5 м. Радиус махового колеса R = 0,8 м.
|
Теоретическая механика |
K4.11 |
Теоретическая механика 2 |
300₽ |
|
|
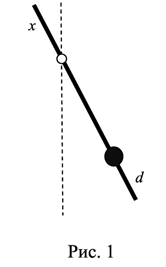
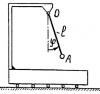
16580 |

Физический маятник представляет собой тонкий однородный стержень длиной l = 1 м и массой m, на котором жестко закреплена материальная точка массой M на расстоянии d (d < l/2) от нижнего конца стержня. Точка подвеса маятника находится на расстоянии x (x < l/2) от верхнего конца стержня (рис. 1). Найти зависимость периода малых колебаний T маятника от расстояния x и построить график этой зависимости T(x) в интервале изменения x от 0 до l/2. Определить по графику минимальное значение периода T колебаний маятника. Ускорение свободного падения g = 9,81 м/c2.
| № варианта |
d, M/m |
| 8 |
d = 0,2 м, M/m = 0,5 |
|
Механика |
|
|
300₽ |
|
|
14694 |
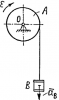
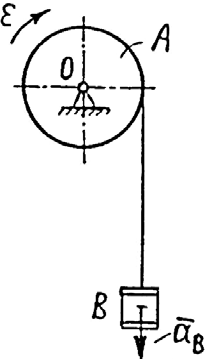
На однородный цилиндр A массой m1 намотана нить, на которой подвешен груз B массой m2. Определить давление цилиндра на ось, если груз опускается по вертикали из состояния покоя с ускорением a = 0,3g.
|
Теоретическая механика |
Д4.11 |
Теоретическая механика 2 |
300₽ |
|
|
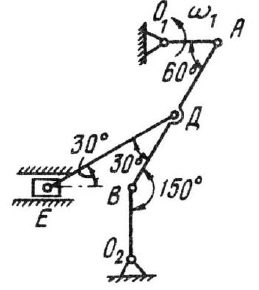
5040 |
 ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
На рис. К3.8 показаны схемы механизмов, причем
О1А = L1 = 0,4 м;
АВ = L2 = 1,4 м;
ДE = L3 = 1,2 м;
02В = L4 = 0,6 м;
АД = ДВ.
Кривошип O1А вращается вокруг оси O1 с постоянной угловой скоростью ω1 = ωOA =4 с-1. Для заданного положения механизма построить мгновенные центры скоростей шатунов АВ и ДЕ, найти скорости точек А, В, Д, Е, угловые скорости указанных шатунов и кривошипа О2В, а также ускорение точки В.
|
Теоретическая механика |
K5.8 |
Теоретическая механика 2 |
300₽ |
|
|
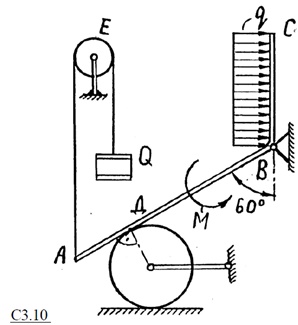
10894 |

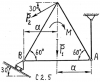
ОПРЕДЕЛЕНИЕ РЕАКЦИИ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Схемы конструкций построены на рис. СЗ. 1 - С3.20. Рычаг ABC с осью вращения в точке B, опирающийся в точке D на гладкий цилиндр, испытывает действие груза Q, распределенной нагрузки интенсивности q и пары сил с моментом M. Пренебрегая весом рычага, найти реакции опор, если АВ = 2ВС = 2а; АД = 0,5а. Q = 10 кH; M = 5 кН∙м; a = 2,5 м; q = 2 кH/м.
|
Теоретическая механика |
C3.10. |
Теоретическая механика 2 |
300₽ |
|
|
13338 |
Шар массой m1, летящий со скоростью v1, сталкивается с неподвижным шаром массой m2. После удара шары разлетаются под углом α друг к другу. Удар абсолютно упругий, столкновение происходит в горизонтальной плоскости. Найти скорости шаров u1 и u2 после удара.
| № варианта |
m1, v1, m2, α |
| 9 |
m1 = 120 г, v1 = 10 м/с, m2 = 200 г, α = 100° |
|
ФИЗИКА |
3-3-9 |
ТГУ. Практические занятия по физике. 2019 год |
300₽ |
|
|
12620 |
ПЛОСКО-ПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Для заданного положения механизма найти скорости точек В и С, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис. К6. I9.
|
Теоретическая механика |
K6.19 |
Теоретическая механика 2 |
300₽ |
|
|
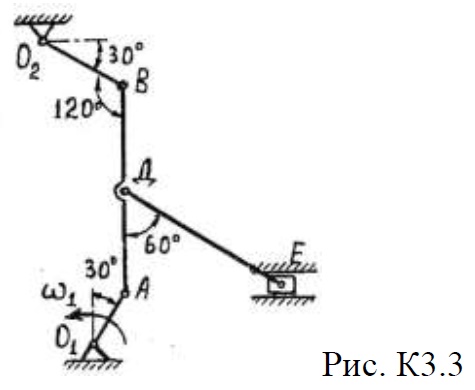
8602 |
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
На рис. К3.3 показана схема механизма, причем
О1А = L1 = 0,4 м;
АВ = L2 = 1,4 м;
ДE = L3 = 1,2 м;
O2В = L4 = 0,6 м;
АД = ДВ.
Кривошип O1А вращается вокруг оси O1 с постоянной угловой скоростью ω1 = ωO1A = 4 с-1. Для заданного положения механизма построить мгновенные центры скоростей шатунов АВ и ДЕ, найти скорости точек A, B, Д, Е, угловые скорости указанных шатунов и кривошипа О2В, а также ускорение точки В.
|
Теоретическая механика |
K5.3 |
Теоретическая механика 2 |
300₽ |
|
|
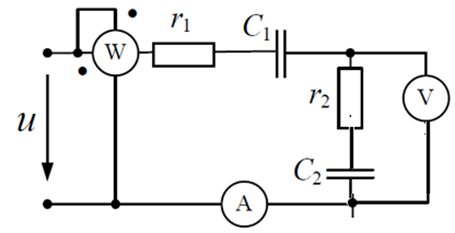
16588 |
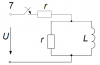
САМОСТОЯТЕЛЬНАЯ РАБОТА 3
Расчёт неразветвлённой электрической цепи постоянного тока
Необходимо:
1. Определить показания приборов, указанных на схеме
2. Определить закон изменения тока Б цепи.
3. Определить закон изменения напряжения между точками, к которым подключен вольтметр.
4. Построить векторную диаграмм токов и напряжений
5. Определять активную и реактивную мощности источника, активную и реактивную мощности приемников. Составить и оценить баланс активной н реактивной мощностей.
6. Определить характер (индуктивность, емкость) и параметры элемента, который должен быть включен в цепь для того, чтобы в ней имел место резонанс напряжений.
Примечание. Ваттметр измеряет активную мощность цепи.
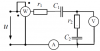
Напряжение на зажимах цепи, вариант которой соответствует последней цифре учебного шифра студента и изображенной на рис, изменяется по закону $u=U_m\cdot \sin{\omega t}$. Амплитудное значение напряжения Um, значения активных сопротивлений r1 и r2, индуктивностей катушек L1 и L2, емкостей конденсаторов C1 и C2 приведены в таблице. Частота питающего напряжения f = 50 Гц.
| Параметр цепи |
Предпоследняя цифра учебного шифра студента |
| 7 |
| Ψ, град |
-30 |
| Um, В |
160 |
| r1, Ом |
6 |
| r2, Ом |
11 |
| L1, Гн |
0,01 |
| L2, Гн |
0,01 |
| C1, мкФ |
300 |
| C2, мкФ |
200 |
|
Электротехника |
|
|
300₽ |
|
|
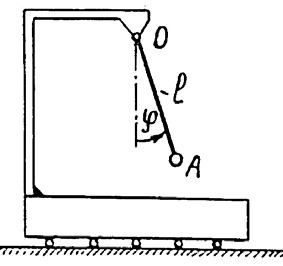
14712 |
На тележке массой М подвешен математический маятник, который совершает колебания по закону φ = φ0 = const. Длина нити маятника равна l, масса точечного груза - m. Найти закон движения тележки, если в начальный момент тележка находилась в покое, а маятник был отведён от вертикали на угол φ0 и отпущен без начальной скорости.
|
Теоретическая механика |
Д4.16 |
Теоретическая механика 2 |
300₽ |
|
|
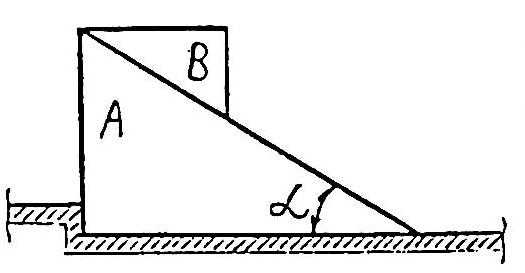
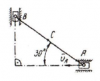
8692 |
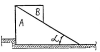
ПРИНЦИП ДАЛАМБЕРА
Клин 1 массой m опускается по наклонной стороне клина 2, образующей угол α = 30° с горизонтом. Определить давление клина 2 на выступ пола.
|
Теоретическая механика |
Д6.12 |
Теоретическая механика 2 |
300₽ |
|
|
5051 |
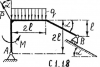
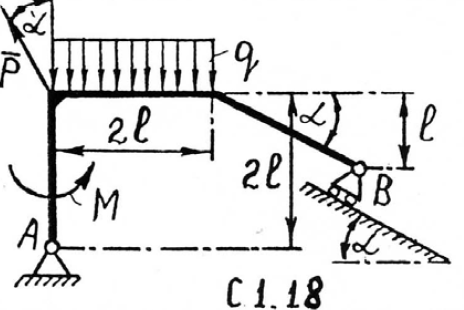
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции. Схемы конструкций указаны на рисунке С 1.8, исходные данные приведены в табл.
| Номер варианта |
P, кН |
G, кН |
M, кНм |
q, кН/м |
l, м |
α, град. |
| C1.18 |
14 |
- |
6 |
2 |
1 |
30° |
|
Теоретическая механика |
C1.18 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
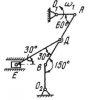
10910 |
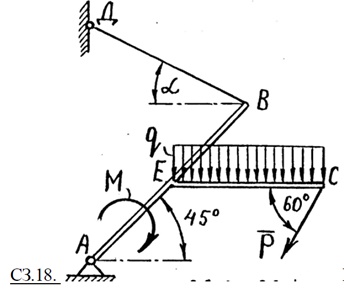
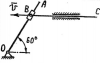
ОПРЕДЕЛЕНИЕ РЕАКЦИИ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Схемы конструкций построены на рис. СЗ. 1 - С3.20.
Кронштейн ABC, нагруженный силой P, распределенной нагрузкой интенсивностью и парой сил с моментом M, удерживается под углом 45° к горизонту тросом BD. Найти натяжение троса и реакцию шарнира A.
P = 12 кН; q = 15 кН/м; M = 8 кН м; AE = EB = 3 м; EC = 4 м; α = 30°.
|
Теоретическая механика |
C3.18. |
Теоретическая механика 2 |
300₽ |
|
|
14064 |

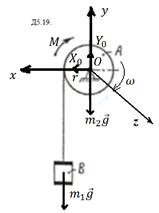
При пуске в ход лебедки к барабану А приложен вращающий момент, пропорциональный времени M = λt где λ - коэффициент пропорциональности; t - время. Груз В массой m1 поднимается при помощи каната, намотанного на барабан A радиусом r и массой m2. Определить угловую скорость барабана, считая его сплошным цилиндром.
|
Теоретическая механика |
Д5.19 |
Теоретическая механика 2 |
300₽ |
|
|
13354 |
Шар массой m1, летящий со скоростью v1, сталкивается с неподвижным шаром массой m2. После удара шары разлетаются под углом α друг к другу. Удар абсолютно упругий, столкновение происходит в горизонтальной плоскости. Найти скорости шаров u1 и u2 после удара.
| № варианта |
m1, v1, m2, α |
| 17 |
m1 = 350 г, v1 = 20 м/с, m2 = 200 г, α = 60° |
|
ФИЗИКА |
3-3-17 |
ТГУ. Практические занятия по физике. 2019 год |
300₽ |
|
|
14562 |
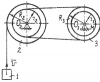
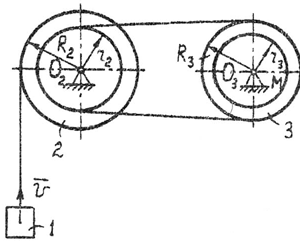
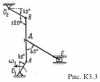
ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.2 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.2 |
Теоретическая механика 2 |
300₽ |
|
|
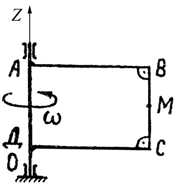
14728 |

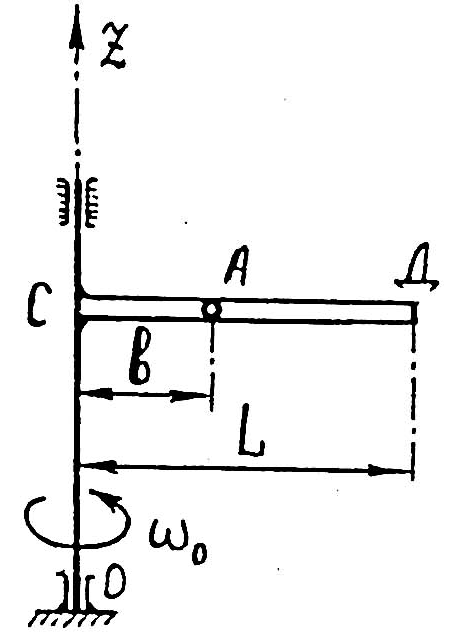
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА
Горизонтальная трубка может свободно вращаться вокруг вертикальной оси Oz. Внутри трубки на расстоянии AC = b находится шарик A. В некоторый момент трубке сообщается угловая скорость ω0. Определить угловую скорость трубки в момент, когда шарик вылетит из трубки. Момент инерции трубки относительно оси вращения равен Jz, L – её длина. Трением пренебречь. Шарик считать материальной точкой массой m.
|
Теоретическая механика |
Д5.18 |
Теоретическая механика 2 |
300₽ |
|
|
10846 |
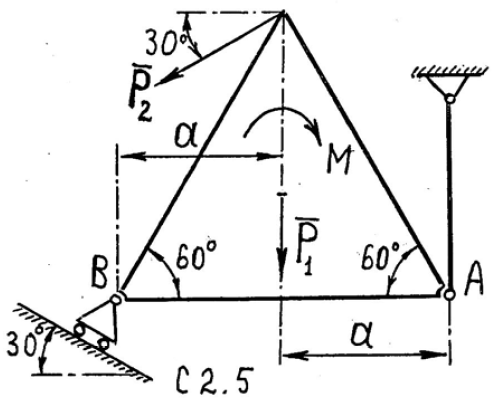
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.5, -исходные данные приведены в таблице 2.
| Номер варианта |
Р1, кН |
P2, кН |
P3, кН |
M кН∙м |
a, м |
b, м |
α, град |
| С-2.5. |
6 |
8 |
0 |
4 |
0.6 |
0 |
0° |
|
Теоретическая механика |
C2.5. |
Теоретическая механика 2 |
300₽ |
|
|
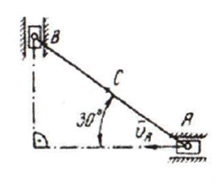
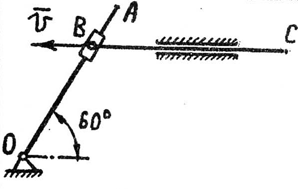
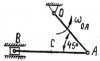
5066 |
Стержень ВС кулисного механизма движется со скоростью v = 1 м/с. Для указанного положения механизма определить угловую скорость кулисы ОА, если расстояние ОВ = 0,7 м
|
Теоретическая механика |
K7.6 |
Теоретическая механика 2 |
300₽ |
|
|
13992 |
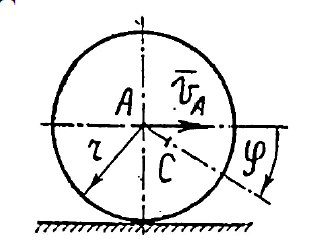
ПРИНЦИП ДАЛАМБЕРА
Ось колеса A массой m = 300 кг, радиусом r = 0,5 м движется с постоянной скоростью VА = 20 м/с. Центр тяжести С колеса смещен от его оси А на расстояние АС = h = 0,02 м. Определить давление колеса на рельс, когда его центр тяжести занимает наинизшее положение. Колесо катится без скольжения.
|
Теоретическая механика |
Д6.13 |
Теоретическая механика 2 |
300₽ |
|
|
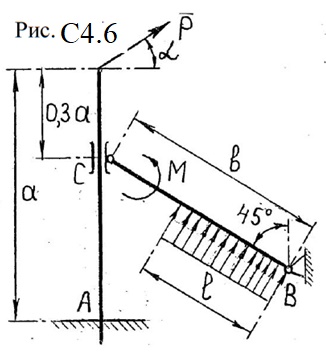
10926 |
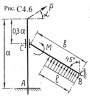
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. C4.6, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| C4.6 |
2 |
2 |
1 |
1.8 |
2.5 |
0.8 |
60° |
|
Теоретическая механика |
C4.6 |
Теоретическая механика 2 |
300₽ |
|
|
8934 |
ОПРЕДЕЛЕНИЕ ХАРАКТЕРИСТИК ДЕЙСТВИЯ ПРОСТРАНСТВЕННОЙ СИСТЕМЫ СИЛ
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C2.3 |
МИИТ. Теоретическая механика. 2014 год |
300₽ |
|
|
14578 |

ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.10 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.10 |
Теоретическая механика 2 |
300₽ |
|
|
8634 |
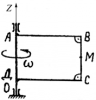
Пластинка АВСД вращается вокруг оси OZ с угловой скоростью ω = 4t2 с-1. По ее стороне ВС в направлении от В к С движется точка М с постоянной скоростью 8 м/с . Определить абсолютную скорость точки М в момент времени t1 = 2 c, если длина АВ = 0,6 м.
|
Теоретическая механика |
K7.14 |
Теоретическая механика 2 |
300₽ |
|
|
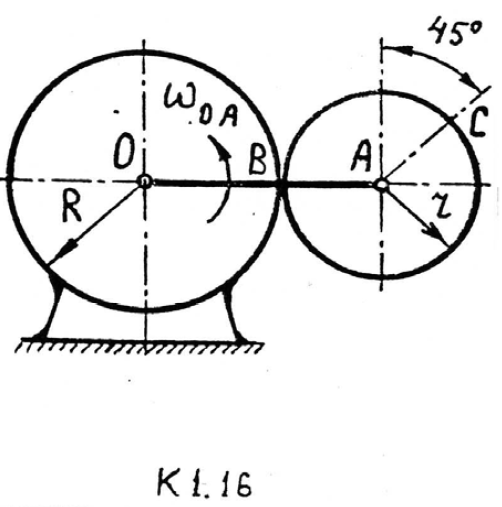
12740 |
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис. K6.5.
OA = 0,35 м;AB = 0,15 м; AC = 0,15 м; ωOA = 2 c-1.
|
Теоретическая механика |
K1.16 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
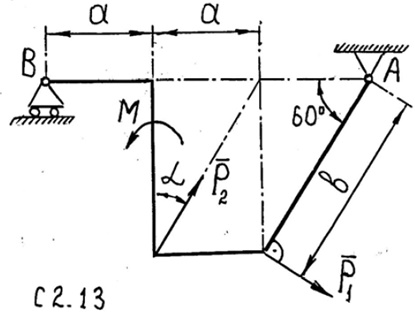
10862 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.13, -исходные данные приведены в таблице 2.
| Номер варианта |
Р1, кН |
P2, кН |
P3, кН |
M кН∙м |
a, м |
b, м |
α, град |
| С-2.13. |
6 |
7 |
0 |
3 |
0.5 |
1.0 |
30° |
|
Теоретическая механика |
C2.13. |
Теоретическая механика 2 |
300₽ |
|
|
5091 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 4.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.9 |
4t2+3 |
3∙t |
1 |
|
Теоретическая механика |
K1.9_1 |
Теоретическая механика |
300₽ |
|