|
8388 |

ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
На рис. К3.18 показана схема механизма, причем
О1А = L1 = 0,4 м;
АВ = L2 = 1,4 м;
ДE = L3 = 1,2 м;
O2В = L4 = 0,6 м;
АД = ДВ.
Ползун в данном положении механизма имеет скорость VB = 4 м/с и ускорение aB = 6 м/с2. Для заданного положения механизма построить мгновенные центры скоростей шатунов АВ и ДЕ, найти скорости точек А, Д, Е, угловые скорости указанных шатунов и кривошипа О1А, а также ускорение точки А.
|
Теоретическая механика |
K5.17 |
Теоретическая механика 2 |
300₽ |
|
|
8488 |

ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
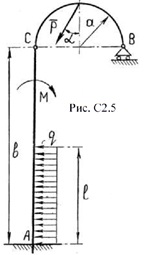
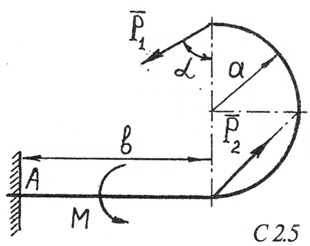
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. С2.5, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С2.5_1 |
4 |
3.2 |
3 |
2.5 |
4 |
2.8 |
30° |
|
Теоретическая механика |
C2.5_1 |
Теоретическая механика |
300₽ |
|
|
9754 |

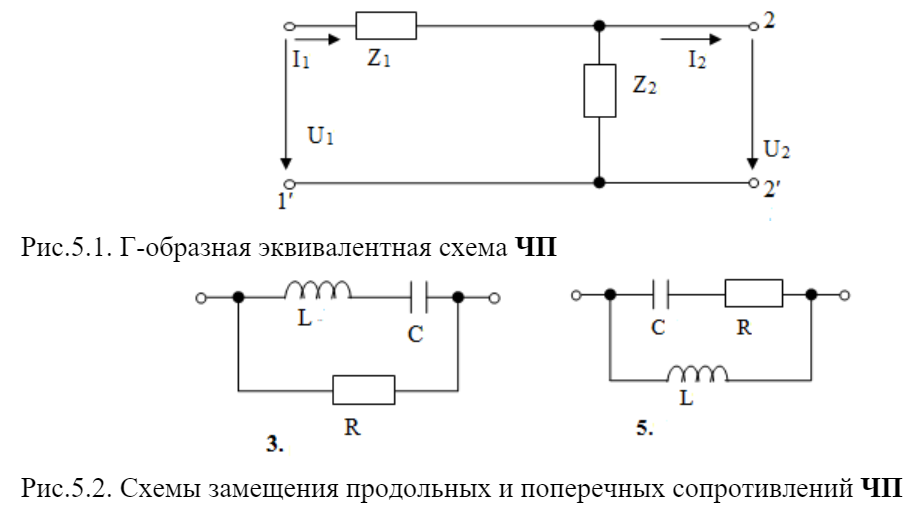
ЗАДАНИЕ № 3 «РАСЧЕТ ЧЕТЫРЁХПОЛЮСНИКА»
На рис. 5.1 представлена Г-образная эквивалентная схема четырёхполюсника (ЧП), где Z1 – продольное сопротивление, Z2 – поперечное сопротивление.
Выполнить следующее:
1) начертить исходную схему ЧП;
2) свести полученную схему ЧП к Г-образной эквивалентной схеме ЧП, заменив трёхэлементные схемы замещения продольного и поперечного сопротивлений двухэлементными схемами: Z1 = R1 + jX1, Z2 = R2 + jX2. Дальнейший расчёт вести для эквивалентной схемы;
3) определить коэффициенты A – формы записи уравнений ЧП;
4) определить сопротивления холостого хода и короткого замыкания со стороны первичных (11’) и вторичных выводов (22’):
а) через A – параметры;
б) непосредственно через продольное и поперечное сопротивления для режимов холостого хода и короткого замыкания на соответствующих выводах;
5) определить характеристические сопротивления для выводов 11’ и 22’ и постоянную передачи ЧП;
6) определить комплексный коэффициент передачи по напряжению и передаточную функцию ЧП;
Таблица 5.1. Параметры элементов продольного и поперечного сопротивлений ЧП
| Номер строки |
R, Ом |
L, мГ |
C, мкФ |
f0, кГц |
| 2 |
30 |
5 |
5 |
30 |
|
Электротехника |
235.3 |
|
300₽ |
|
|
14730 |
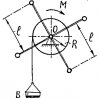
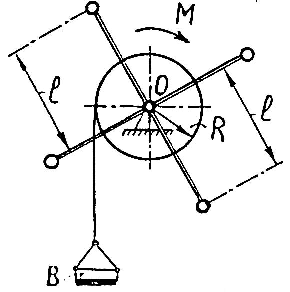
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА.
Груз B массой m1 прикреплен к тросу, намотанному на барабан радиусом R, массой m2. Барабан начинает вращаться вместе с невесомой крестовиной, на концах которой прикреплены четыре груза массой m3 каждый, под действием вращающего момента M. Все стержни крестовины имеют одинаковую длину 2l. Определить закон изменения скорости груза. Барабан считать сплошным цилиндром.
|
Теоретическая механика |
Д5.16 |
Теоретическая механика 2 |
300₽ |
|
|
10848 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
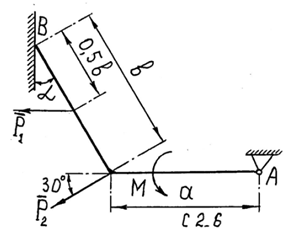
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.6, -исходные данные приведены в таблице 2.
| Номер варианта |
Р1, кН |
P2, кН |
P3, кН |
M, кН∙м |
a, м |
b, м |
α, град |
| С-2.6. |
7 |
9 |
0 |
5 |
1.0 |
1.0 |
30° |
|
Теоретическая механика |
C2.6. |
Теоретическая механика 2 |
300₽ |
|
|
10928 |

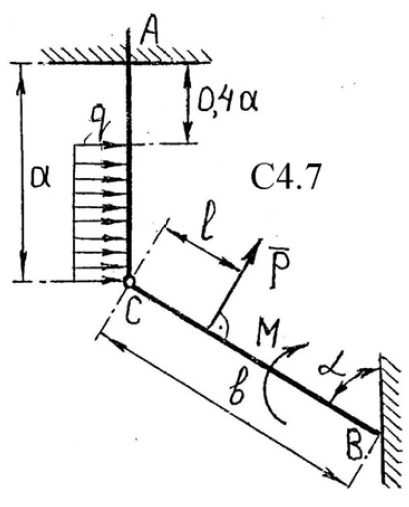
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. C4.7, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| C4.7 |
6 |
3.6 |
2 |
1.5 |
3 |
1.5 |
30° |
|
Теоретическая механика |
C4.7 |
Теоретическая механика 2 |
300₽ |
|
|
14580 |

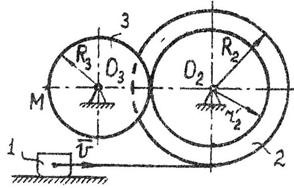
ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.11 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.11 |
Теоретическая механика 2 |
300₽ |
|
|
8406 |

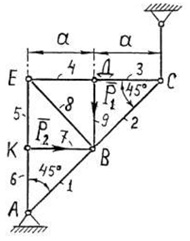
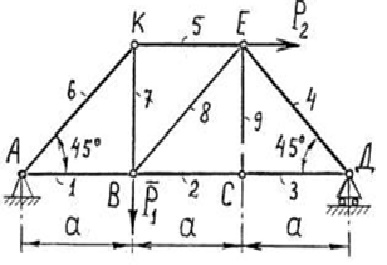
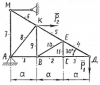
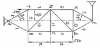
ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. С3.2 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| С3.2 |
1, 7, 5 |
2, 3 |
80 |
50 |
|
Теоретическая механика |
C3.2_1 |
Теоретическая механика |
300₽ |
|
|
8504 |

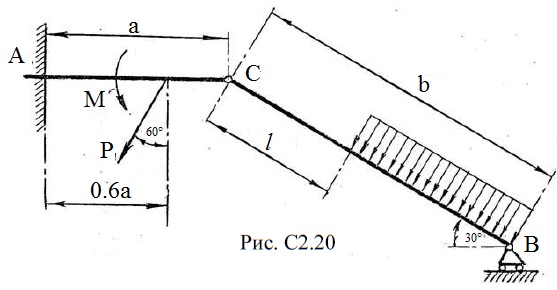
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. С2.20, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С2.20 |
2 |
3 |
3 |
1.8 |
2.5 |
1.0 |
60° |
|
Теоретическая механика |
C2.20_1 |
Теоретическая механика |
300₽ |
|
|
8974 |
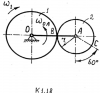
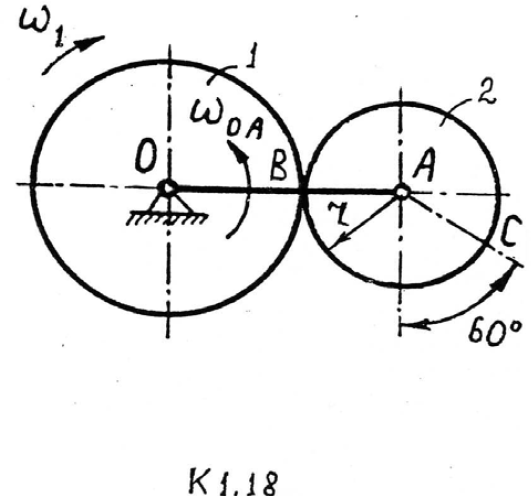
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис.
AB = R + r = 35 см = 0,35 м; r = 15 см =0,15 м; AC = 15 см = 0,15 м; ωOA = 2 c-1; ω1 = 2,5 c-1.
|
Теоретическая механика |
K1.18. |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
6363 |
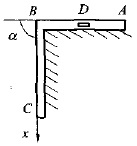
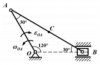
ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ
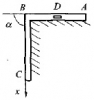
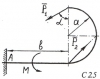
Груз D массой т, получив в точке A начальную скорость движется по изогнутой трубе ABC, расположенной в вертикальной плоскости.
На участке AB трубы на груз, кроме силы тяжести, действует сила сопротивления R, зависящая от скорости v груза D: R=0,1∙v .
В точке B груз, изменив направление приобретенной скорости, но сохранив при этом ее величину, переходит на участок BC трубы, где на него, помимо силы тяжести, действует сила трения скольжения (коэффициент трения груза о трубу f = 0,2) и переменная по величине сила F = 3∙sin(π∙t), направленная вдоль участка BC. Проекция Fx последней силы на ось Bx задается.
Считая груз D материальной точкой, и зная расстояние AB или время t, движения груза от точки A до точки B, найти уравнение х = х(t) движения груза на участке BC.
Варианты расчетных схем изображены на рис. 2.1. Варианты числовых значений параметров приведены в таблице.
| Номер варианта |
№ Дано |
m, кг |
v0, м/с |
µ, Н∙с/м |
n |
F, Н |
α, град |
t, сек |
| 27 |
1 |
5 |
2 |
0,1 |
1 |
3∙sin(πt) |
30 |
3 |
|
Теоретическая механика |
|
|
300₽ |
|
|
10864 |
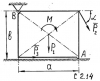
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.14, -исходные данные приведены в таблице 2.
| Номер варианта |
Р1, кН |
P2, кН |
P3, кН |
M кН∙м |
a, м |
b, м |
α, град |
| С-2.14. |
8 |
9 |
6 |
4 |
1.1 |
0.9 |
60° |
|
Теоретическая механика |
C2.14. |
Теоретическая механика 2 |
300₽ |
|
|
16842 |
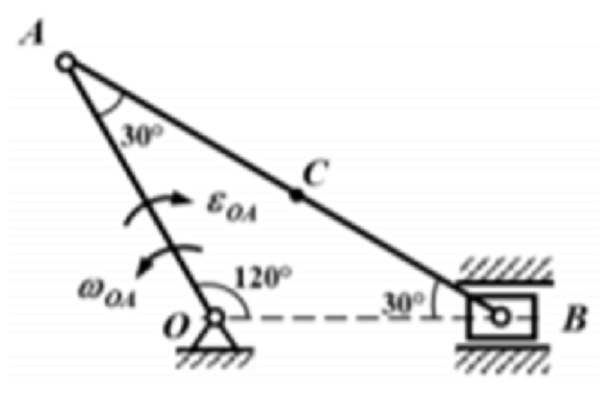
Для заданного положения звеньев механизма определить скорости и ускорения точек В и С.
εOA = 2 рад/с2, ωОA = 3 рад/с, OA = 20 см, AC = CB.
|
Теоретическая механика |
|
|
300₽ |
|
|
11256 |
КИНЕМАТИКА ТОЧКИ
Точка М движется по окружности радиуса R согласно уравнению S = S(t). Определить и построить для момента времени t1 скорость, касательное, нормальное и полное ускорение этой точки. Исходные данные для расчета приведены в табл. 2.
| № варианта |
S = S(t), cм |
R, см |
Время t1, с |
| К2.9 |
4t2 + 3 |
2t |
1 |
|
Теоретическая механика |
K2.9 |
Теоретическая механика 2 |
300₽ |
|
|
8338 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.5 -исходные данные приведены в таблице 2.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С-2.5 |
6 |
5 |
6 |
0,8 |
1 |
- |
60° |
|
Теоретическая механика |
С-2.5 |
Теоретическая механика |
300₽ |
|
|
14596 |

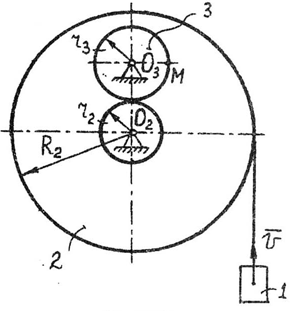
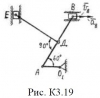
ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.19 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.19 |
Теоретическая механика 2 |
300₽ |
|
|
8422 |

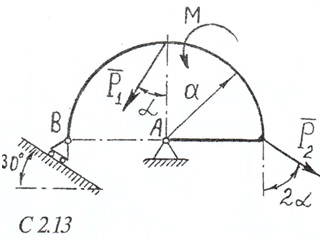
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.13, -исходные данные приведены в таблице 2.
Таблица 2
| Номер варианта |
Р, кН |
М, кН∙м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С-2.13 |
12 |
10 |
6 |
1 |
- |
- |
30° |
|
Теоретическая механика |
C2.13 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
16573 |
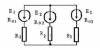
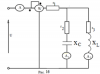
САМОСТОЯТЕЛЬНАЯ РАБОТА 3
Расчёт неразветвлённой электрической цепи постоянного тока
Необходимо:
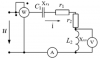
1. Определить показания приборов, указанных на схеме
2. Определить закон изменения тока Б цепи.
3. Определить закон изменения напряжения между точками, к которым подключен вольтметр.
4. Построить векторную диаграмм токов и напряжений
5. Определять активную и реактивную мощности источника, активную и реактивную мощности приемников. Составить и оценить баланс активной н реактивной мощностей.
6. Определить характер (индуктивность, емкость) и параметры элемента, который должен быть включен в цепь для того, чтобы в ней имел место резонанс напряжений.
Примечание. Ваттметр измеряет активную мощность цепи.
Напряжение на зажимах цепи, вариант которой соответствует последней цифре учебного шифра студента и изображенной на рис, изменяется по закону $u=U_m\cdot \sin{\omega t}$. Амплитудное значение напряжения Um, значения активных сопротивлений r1 и r2, индуктивностей катушек L1 и L2, емкостей конденсаторов C1 и C2 приведены в таблице. Частота питающего напряжения f = 50 Гц.
| Параметр цепи |
Предпоследняя цифра учебного шифра студента |
| 8 |
| Ψ, град |
-15 |
| Um, В |
240 |
| r1, Ом |
10 |
| r2, Ом |
12 |
| L1, Гн |
0,01 |
| L2, Гн |
0,05 |
| C1, мкФ |
250 |
| C2, мкФ |
800 |
|
Электротехника |
|
|
300₽ |
|
|
5113 |
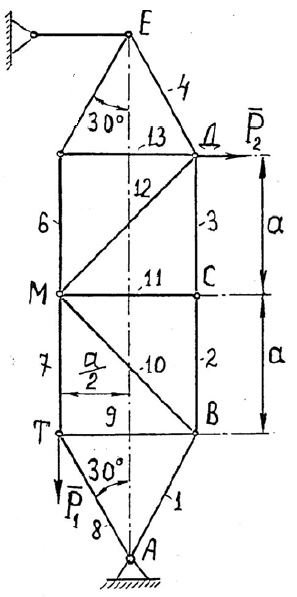
 ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
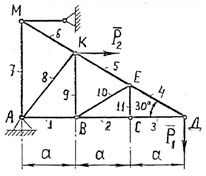
Определить усилия в стержнях плоской фермы рис. С3.6 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| С3.15 |
2, 11, 4 |
6, 7 |
90 |
140 |
|
Теоретическая механика |
C3.15_1 |
Теоретическая механика |
300₽ |
|
|
9706 |
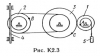
КИНЕМАТИКА
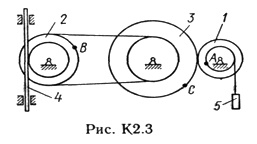
Механизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза S, привязанного к концу нити, намотанной на одно из колес (рис K2.0 — K2 9, табл. K2). Радиусы ступеней колес равны соответственно у колеса 1 — r1 = 2 см, R1 = 4 см, у колеса 2 — r2 = 6 см, R2 = 8 см, у колеса 3 — r3 = 12 см, R3 = 16 см. На ободьях колес расположены точки A, B и C.
| Номер условия |
Дано |
Найти |
| скорости |
ускорения |
| 0 |
S4 = 4(7t - t2) |
vB, vC |
ε2, aA, a5 |
В столбце «Дано» таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где S4(t) — закон движения рейки 4, v4(t) — закон изменения скорости колеса 2, vC(t) — закон изменения скорости колеса 3 и т д (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s4, s5 и v4, v5 — вниз.
Определить в момент времени t1 = 2 с указанные в таблице в столбцах «Найти» скорости (v — линейные, ω — угловые) и ускорения (a — линейные, ε — угловые) соответствующих точек или тел (v5— скорость груза 5 и т.д.).
|
Теоретическая механика |
|
|
300₽ |
|
|
8520 |
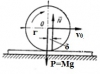
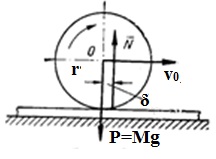
Оси колеса радиусом r, находящемуся на горизонтальной плоскости, сообщили скорость V0. Коэффициент трения качения равен δ. Определить путь, пройденный колесом до остановки. Качение колеса происходит без скольжения. Колесо считать однородным диском.
|
Теоретическая механика |
D4.10 |
Теоретическая механика |
300₽ |
|
|
10880 |
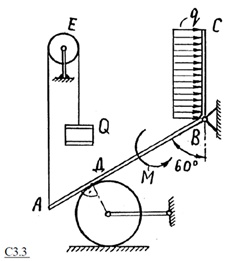
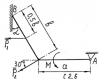
ОПРЕДЕЛЕНИЕ РЕАКЦИИ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Схемы конструкций построены на рис. СЗ. 1 - С3.20. Рычаг ABC с осью вращения в точке В, опирающийся в точке Д на гладкий цилиндр, испытывает действие груза Q. распределенной нагрузки интенсивности q и пары сил с моментом M. Пренебрегая весом рычага, найти реакции опор, если АВ = 2ВС = 2а; АД = 0,5а; Q = 8 кH: q = 3 кH/м; М = 5 кН м; а = 2,5 м.
|
Теоретическая механика |
C3.3. |
Теоретическая механика 2 |
300₽ |
|
|
14034 |
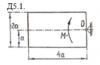
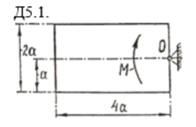
Однородная прямоугольная пластина массой m со сторонами 2a и 4a вращается вокруг вертикальной неподвижной оси O, перпендикулярной к ее плоскости. На пластину действует пара сил с моментом M = 2t, лежащая в ее плоскости. Определить закон изменения угловой скорости пластины, если в начальный момент она была неподвижна
|
Теоретическая механика |
Д5.1 |
Теоретическая механика 2 |
300₽ |
|
|
6487 |
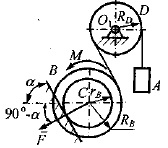
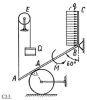
ПРИМЕНЕНИЕ ТЕОРЕМЫ ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ К ИЗУЧЕНИЮ ДВИЖЕНИЯ МЕХАНИЧЕСКОЙ СИСТЕМЫ
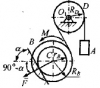
Механическая система, изображенная на рисунке, приводится в движение из состояния покоя. При этом колесо B катится без скольжения по вертикальной плоскости. Массы тел A, B и D (mA, mB, mD), заданная нагрузка F и M, радиус инерции ρB колеса B. Радиусы колеса B и шкива D соответственно равны RB = 0,8 м, RD = 0,2 м, rB = 0,5 м. Угол α имеет значение: α = 30°. Коэффициент трения качения колеса B равен k = 0,05∙RB; коэффициент трения скольжения тела B равен f = 0,1. Используя теорему об изменении кинетической энергии системы, определить скорость и ускорение тела A после того, как оно переместится на расстояние SA = 2 м. Шкив D считать однородным сплошным диском; силами сопротивления в подшипниках, массой троса, его растяжением и проскальзыванием по ободу шкива пренебречь.
| Номер варианта |
№ Дано |
mA, кг |
mB, кг |
mD, кг |
M, Н∙м |
F, Н |
ρB, см |
| 20 |
4 |
8 |
50 |
10 |
10 |
400 |
0.4 |
|
Теоретическая механика |
|
|
300₽ |
|
|
8242 |
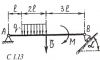
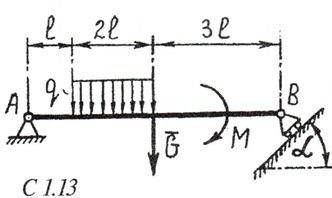
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. C1.13, исходные данные приведены в табл. 1.
| Номер варианта |
P, кН |
G, кН |
M, кНм |
q, кН/м |
l, м |
α, град |
| C1.13 |
- |
10 |
4 |
3 |
1 |
45° |
|
Теоретическая механика |
C1.13 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
13324 |
Шар массой m1, летящий со скоростью v1, сталкивается с неподвижным шаром массой m2. После удара шары разлетаются под углом α друг к другу. Удар абсолютно упругий, столкновение происходит в горизонтальной плоскости. Найти скорости шаров u1 и u2 после удара.
| № варианта |
m1, v1, m2, α |
| 2 |
m1 = 120 г, v1 = 10 м/с, m2 = 180 г, α = 135° |
|
ФИЗИКА |
3-3-2 |
ТГУ. Практические занятия по физике. 2019 год |
300₽ |
|
|
14276 |
Закон движения материальной точки дан уравнениями $x = R \cdot \cos{\omega t}$; $y = R \cdot \sin{\omega t}$; $z=bt$. Здесь $R, \omega, b$ - положительные постоянные величины. Найдите радиус кривизны траектории материальной точки.
|
Аналитическая геометрия |
|
|
350₽ |
|
|
8040 |
В результате эксперимента получены данные, записанные в виде статистического ряда. В задаче требуется:
а) записать значения результатов экспериментов в виде вариационного ряда;
б) найти размах варьирования и разбить его на 9 интервалов;
в) построить полигон частот, гистограмму относительных частот и график эмпирической функции распределения;
г) найти числовые характеристики выборки Хn, D;
д) приняв в качестве нулевой гипотезу HO; генеральная совокупность, из которой извлечена выборка, имеет нормальное распределение, проверить ее, пользуясь критерием Пирсона при уровне значимости α = 0,25;
е) найти доверительный интервал для математического ожидания при надежности γ = 0,9.
| 9,4 |
7,9 |
6,3 |
6,8 |
4,2 |
11,9 |
7,8 |
1,7 |
6,1 |
8,8 |
| 8,7 |
11,1 |
7,7 |
1,8 |
5,5 |
10,5 |
4,3 |
3,8 |
1,4 |
11,2 |
| 1,1 |
7,3 |
3,7 |
4,4 |
11,8 |
8,6 |
1,9 |
5,6 |
10,1 |
8,4 |
| 10,0 |
11,6 |
5,2 |
2,1 |
5,7 |
4,8 |
7,4 |
0,8 |
4,7 |
3,6 |
| 8,3 |
7,6 |
0,7 |
7,3 |
3,4 |
11,4 |
5,7 |
9,9 |
2,2 |
4,6 |
| 2,3 |
4,7 |
9,7 |
11,3 |
5,8 |
4,9 |
3,3 |
0,5 |
7,5 |
4,6 |
| 5,0 |
0,4 |
8,9 |
7,1 |
9,6 |
11,5 |
5,9 |
9,0 |
5,3 |
2,4 |
| 9,5 |
5,9 |
1,0 |
9,1 |
2,5 |
6,0 |
8,2 |
3,2 |
10,9 |
6,1 |
| 10,2 |
2,6 |
4,5 |
3,1 |
6,2 |
11,7 |
6,3 |
0,2 |
7,0 |
9,2 |
| 1,2 |
6,4 |
11,9 |
6,9 |
8,1 |
6,5 |
2,9 |
6,2 |
4,4 |
10,3 |
|
Математическая статистика |
|
|
375₽ |
|
|
14882 |
Точечный монохроматический источник света (длина волны 638 нм) расположен на расстоянии 50 см от ширмы с круглым отверстием 0,3 мм. Найдите положение наиболее удаленного от ширмы максимума освещенности. Построить график распределения интенсивности вдоль оси отверстия.
|
Оптика |
|
|
400₽ |
|
|
11632 |

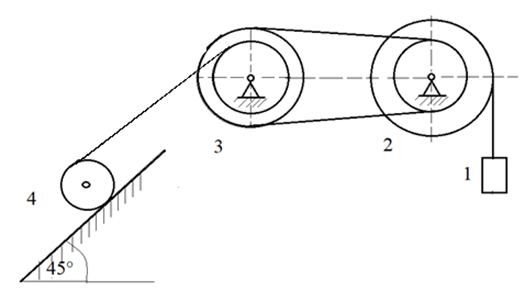
Механическая система, состоящая из четырех тел, приходит в движение под действием сил тяжести из состояния покоя. Начальное положение системы показано на рисунках 2.1-2.5. Учитывая трение качения тела 4 (вариант 19), пренебрегая другими силами сопротивления и массами нитей, предполагаемых нерастяжимыми, определить:
1. Скорость тела 1 в тот момент времени, когда пройденный им путь станет равным S1.
2. Ускорения тел, движущихся поступательно и ускорения центров масс тел, совершающих плоскопараллельное движение, угловое ускорение тел, совершающих вращательное и плоскопараллельное движения.
| Вариант № |
m1 |
m2 |
m3 |
m4 |
i2x |
i3x |
f |
δ, м |
| 19 |
6m |
3m |
2m |
m |
1,3r |
1,2r |
- |
0,001 |
|
Теоретическая механика |
|
|
400₽ |
|
|
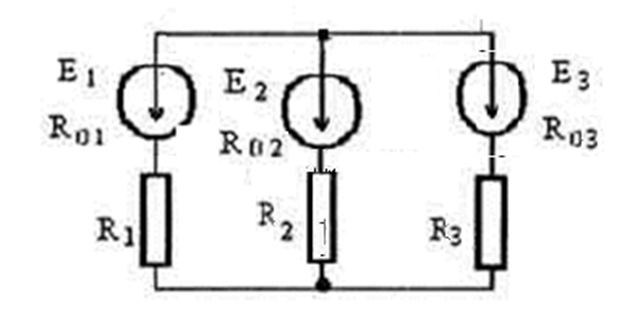
15868 |
Дана сложная электрическая цепь. Определить токи в данной цепи методом наложений.
| E1, В |
E2, В |
E3, В |
R01, Ом |
R02, Ом |
R03, Ом |
R1, Ом |
R2, Ом |
R3, Ом |
| 105 |
25 |
90 |
1 |
2 |
1,5 |
35 |
10 |
25 |
|
Электротехника |
|
|
400₽ |
|
|
8398 |
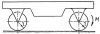
Тележка начинает движение из состояния покоя под действием момента М, приложенного к передним колёсам. Масса тележки без колёс равна m1, масса каждого из четырёх колёс радиусом r равна m2, коэффициент трения качения fδ. Определить ускорение тележки, считая колёса однородными дисками.
|
Теоретическая механика |
Д7.18 |
Теоретическая механика 2 |
400₽ |
|
|
11006 |

ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. C5.4 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| C5.41 |
2, 8, 5 |
3, 4 |
70 |
90 |
|
Теоретическая механика |
C5.4 |
Теоретическая механика 2 |
400₽ |
|
|
11038 |
ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. C5.19 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| C5.19 |
7, 10, 2 |
5, 4 |
170 |
200 |
|
Теоретическая механика |
C5.19 |
Теоретическая механика 2 |
400₽ |
|
|
16913 |
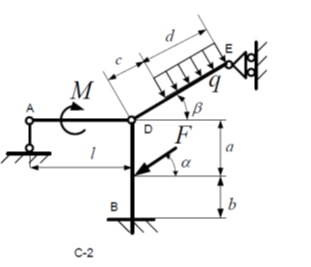
Для указанной на рисунке (С-2) конструкции найти значения неизвестных реакций внешних и внутренних связей.
| № |
a, см |
b, см |
c, см |
d, см |
l, см |
α, ° |
β, ° |
q, Н/м |
F, Н |
M, Н∙м |
| 8 |
40 |
30 |
30 |
50 |
80 |
45 |
30 |
6 |
3 |
5 |
|
Теоретическая механика |
|
|
400₽ |
|
|
16132 |
В результате эксперимента получены значения величины Х, приведённые в таблице 1.
| X |
21 |
24 |
26 |
26 |
27 |
27 |
27 |
28 |
29 |
30 |
30 |
30 |
31 |
32 |
32 |
32 |
33 |
33 |
35 |
36 |
51 |
1) Произвести отсев грубых погрешностей.
2) Сделать проверку гипотезы нормальности эмпирического распределения (H0). (Применить три метода)
|
Математическая статистика |
|
|
400₽ |
|
|
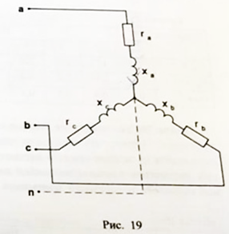
16729 |

В трехфазную четырехпроводную цепь с симметричным линейным напряжением UЛ, включены звездой сопротивления ra, rb, rc и xa, хb, xc. Определить фазные и линейные токи, ток в нейтральном проводе, активную мощность всей цепи и каждой фазы в отдельности. Построить векторную диаграмму токов и напряжений.
| Номер варианта |
UЛ, В |
ra, Ом |
rb, Ом |
rc, Ом |
xa, Ом |
xb, Ом |
xc, Ом |
| 7 |
380 |
7 |
8 |
1 |
8 |
7 |
12 |
|
Электротехника |
|
|
400₽ |
|
|
6401 |
Духон М. Ю. Часть 2, 80 примеров
2.1.1. Найти производную функции: $f(x)=2x^4-3x^2+5x-7$.
и ещё 79 такого рода примеров
|
Математический анализ |
|
|
400₽ |
|
|
16813 |
В правильной пирамиде SABCD точка K – середина ребра AD, точка M – середина ребра AB, а точка N – середина ребра BC. Точки P, Q, R лежат на отрезках SK, SM и SN соответственно, причём SP:PK = 2:1, SQ:QM = 4:7, а R – середина отрезка SN. В каком отношении плоскость PQR делит ребра пирамиды, которые она пересекает?
|
Стереометрия |
|
|
400₽ |
|
|
8618 |
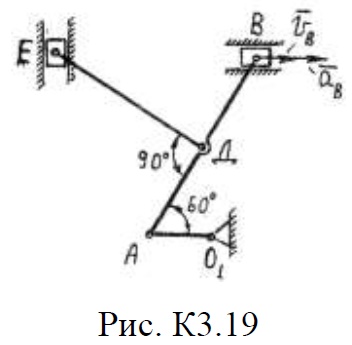
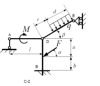
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
На рис. К3.19 показана схема механизма, причем
О1А = L1 = 0,4 м;
АВ = L1 = 1,4 м;
ДE = L3 = 1,2 м;
O2В = L4 = 0,6 м;
АД = ДВ.
Ползун в данном положении механизма имеет скорость VB = 4 м/с и ускорение aB = 6 м/с2. Для заданного положения механизма построить мгновенные центры скоростей шатунов АВ и ДЕ, найти скорости точек А, Д, Е, угловые скорости указанных шатунов и кривошипа О1А, а также ускорение точки А.
|
Теоретическая механика |
K1.19 |
Теоретическая механика 2 |
400₽ |
|
|
16726 |
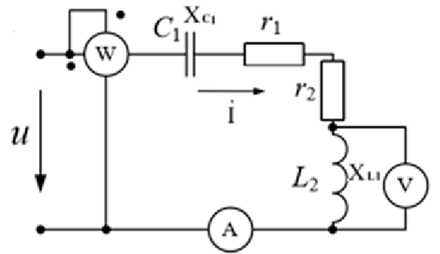
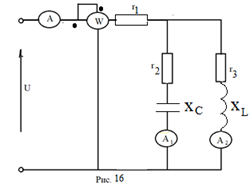
В сеть переменного тока напряжением U включена цепь, состоящая из двух параллельных ветвей с сопротивлением r1, r2 и r3, индуктивным сопротивлением xL и ёмкостным сопротивлением xC (рис. 16, табл. 21). Определить показания измерительных приборов, включенных в сеть, полную и реактивную мощность цепи, построить векторную диаграмму и треугольник мощностей.
Таблица 21
| Номер варианта |
U, В |
r1, Ом |
r2, Ом |
r3, Ом |
xL, Ом |
xC, Ом |
| 3 |
200 |
3,5 |
15 |
6,6 |
9,6 |
6 |
|
Электротехника |
|
|
400₽ |
|
|
12266 |
Геометрическая фигура вращается вокруг оси, лежащей в ее плоскости. По каналу, расположенном на фигуре, движется точка M по известному закону AM(t) = φ(t) = AM = 3∙π/4(t2 + 4t) (в см). Найти абсолютную скорость и абсолютное ускорение точки при t = 2 c. Даны закон вращения фигуры φ(t) постоянная угловая скорость ω(0), время t и размеры фигуры. Углы даны в рад, размеры - в см. Длина AM - длина дуги окружности.
ω = 0,46 рад/с, R = 12 см, t = 2 с.
|
Механика |
|
|
400₽ |
|
|
14472 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
19 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14250 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры — в см.
|
Теоретическая механика |
2 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14424 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
9 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14456 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
15 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14494 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
27 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14482 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
23 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14450 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
11 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14504 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
28 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|