|
5066 |
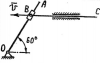
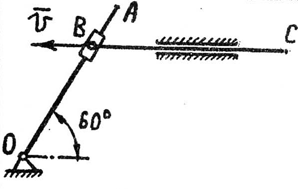
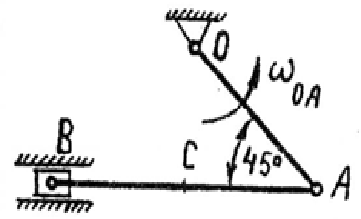
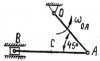
Стержень ВС кулисного механизма движется со скоростью v = 1 м/с. Для указанного положения механизма определить угловую скорость кулисы ОА, если расстояние ОВ = 0,7 м
|
Теоретическая механика |
K7.6 |
Теоретическая механика 2 |
300₽ |
|
|
13992 |
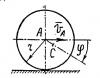
ПРИНЦИП ДАЛАМБЕРА
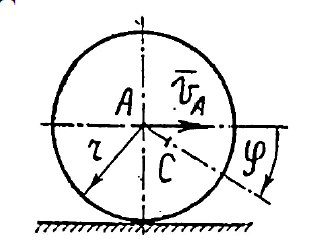
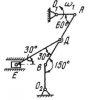
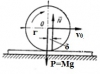
Ось колеса A массой m = 300 кг, радиусом r = 0,5 м движется с постоянной скоростью VА = 20 м/с. Центр тяжести С колеса смещен от его оси А на расстояние АС = h = 0,02 м. Определить давление колеса на рельс, когда его центр тяжести занимает наинизшее положение. Колесо катится без скольжения.
|
Теоретическая механика |
Д6.13 |
Теоретическая механика 2 |
300₽ |
|
|
10926 |
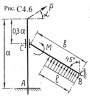
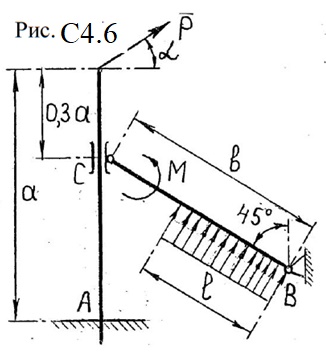
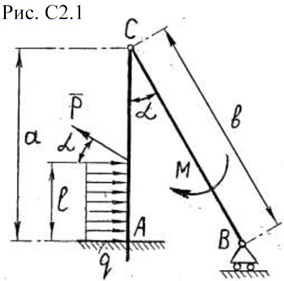
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. C4.6, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| C4.6 |
2 |
2 |
1 |
1.8 |
2.5 |
0.8 |
60° |
|
Теоретическая механика |
C4.6 |
Теоретическая механика 2 |
300₽ |
|
|
3282 |
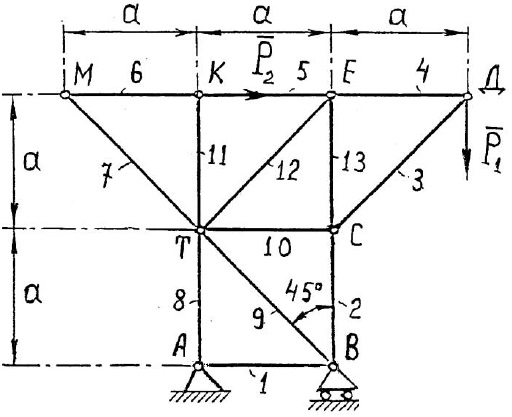
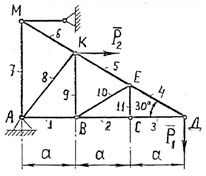
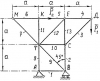
 ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
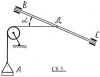
Определить усилия в стержнях плоской фермы (рис. С3.1 – С3.20) соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| С3.7 |
1, 9, 3 |
4,5 |
150 |
120 |
В точке А заменить подвижный шарнир на НЕ ПОДВИЖНЫЙ.
|
Теоретическая механика |
C3.7_1 |
Теоретическая механика |
300₽ |
|
|
8934 |
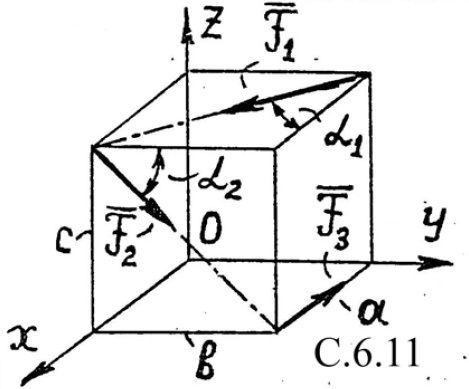
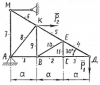
ОПРЕДЕЛЕНИЕ ХАРАКТЕРИСТИК ДЕЙСТВИЯ ПРОСТРАНСТВЕННОЙ СИСТЕМЫ СИЛ
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C2.3 |
МИИТ. Теоретическая механика. 2014 год |
300₽ |
|
|
14578 |

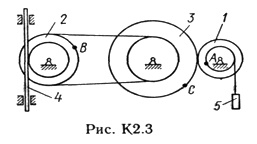
ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.10 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.10 |
Теоретическая механика 2 |
300₽ |
|
|
8634 |
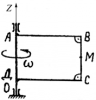
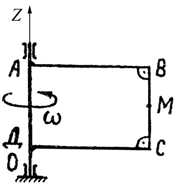
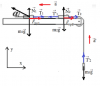
Пластинка АВСД вращается вокруг оси OZ с угловой скоростью ω = 4t2 с-1. По ее стороне ВС в направлении от В к С движется точка М с постоянной скоростью 8 м/с . Определить абсолютную скорость точки М в момент времени t1 = 2 c, если длина АВ = 0,6 м.
|
Теоретическая механика |
K7.14 |
Теоретическая механика 2 |
300₽ |
|
|
12740 |
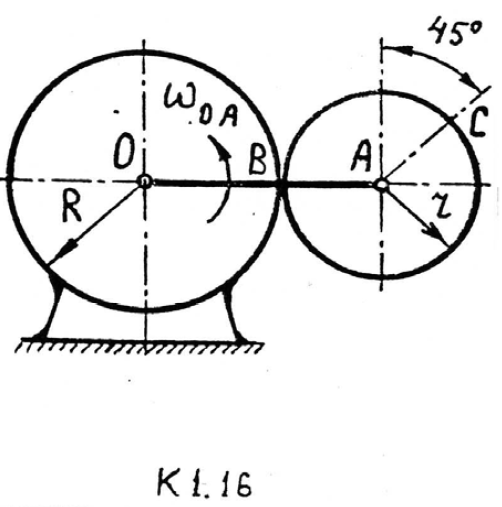
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис. K6.5.
OA = 0,35 м;AB = 0,15 м; AC = 0,15 м; ωOA = 2 c-1.
|
Теоретическая механика |
K1.16 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
10862 |
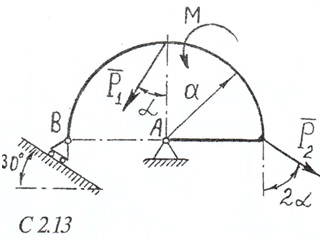
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
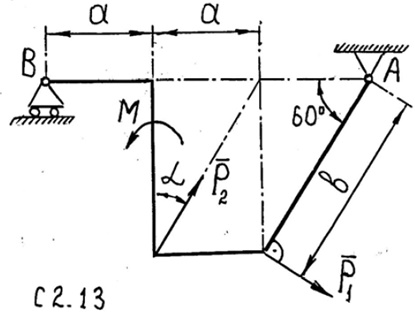
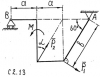
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.13, -исходные данные приведены в таблице 2.
| Номер варианта |
Р1, кН |
P2, кН |
P3, кН |
M кН∙м |
a, м |
b, м |
α, град |
| С-2.13. |
6 |
7 |
0 |
3 |
0.5 |
1.0 |
30° |
|
Теоретическая механика |
C2.13. |
Теоретическая механика 2 |
300₽ |
|
|
5091 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 4.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.9 |
4t2+3 |
3∙t |
1 |
|
Теоретическая механика |
K1.9_1 |
Теоретическая механика |
300₽ |
|
|
11252 |
КИНЕМАТИКА ТОЧКИ
Точка М движется по окружности радиуса R согласно уравнению S = S(t). Определить и построить для момента времени t1 скорость, касательное, нормальное и полное ускорение этой точки. Исходные данные для расчета приведены в табл. 2.
| № варианта |
S = S(t), cм |
R, см |
Время t1, с |
| К2.7 |
2t |
4t - 6t2 |
1 |
|
Теоретическая механика |
K2.7 |
Теоретическая механика 2 |
300₽ |
|
|
14594 |

ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.18 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.18 |
Теоретическая механика 2 |
300₽ |
|
|
8566 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = x(t), у = y(t). найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 4.
| Номер варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| K1.12 |
2∙sin(πt/6) - 4 |
3∙cos(πt/6) |
2 |
|
Теоретическая механика |
K1.12_1 |
Теоретическая механика |
300₽ |
|
|
14760 |
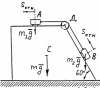
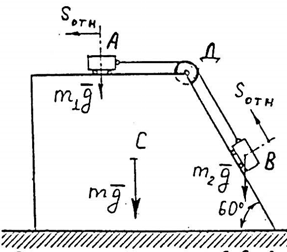
По призме C массой m = 7 кг могут двигаться тележки A и B массами m1 = 1 кг и m2 = 2 кг соответственно. Тележки связаны невесомой нитью, переброшенной через неподвижный блок Д. В начальный момент система находится в покое, затем тележка A начинает двигаться относительно призмы влево по закону Sотн = 5t3, м. Oпределить скорость призмы при t = 0,5 с.
|
Теоретическая механика |
Д9.8 |
Теоретическая механика 2 |
300₽ |
|
|
10878 |

ОПРЕДЕЛЕНИЕ РЕАКЦИИ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
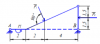
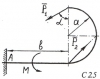
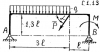
Схемы конструкций построены на рис. СЗ. 1 - С3.20. К изогнутой балке ABC, удерживаемой в равновесии тросом, перекинутым через блок, приложены сита P, распределенная нагрузка интенсивности q и пара сил моментом M. Определить натяжение троса и реакцию шарнира A, полагая АД = ЕВ = a; ДЕ = ВС = 4а. P = 6 кН; q = 2 кН/м; М = 5 кН м; a = 2 м; α = 30°.
|
Теоретическая механика |
C3.2. |
Теоретическая механика 2 |
300₽ |
|
|
5101 |
 ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. С3.6 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| С3.10 |
7, 11, 5 |
1, 2 |
160 |
100 |
В задаче № С 3.10 нужно поменять местами подвижный и неподвижный шарнир.
|
Теоретическая механика |
C3.10_1 |
Теоретическая механика |
300₽ |
|
|
13322 |
Шар массой m1, летящий со скоростью v1, сталкивается с неподвижным шаром массой m2. После удара шары разлетаются под углом α друг к другу. Удар абсолютно упругий, столкновение происходит в горизонтальной плоскости. Найти скорости шаров u1 и u2 после удара.
| № варианта |
m1, v1, m2, α |
| 1 |
m1 = 100 г, v1 = 10 м/с, m2 = 150 г, α = 120° |
|
ФИЗИКА |
3-3-1 |
ТГУ. Практические занятия по физике. 2019 год |
300₽ |
|
|
8120 |

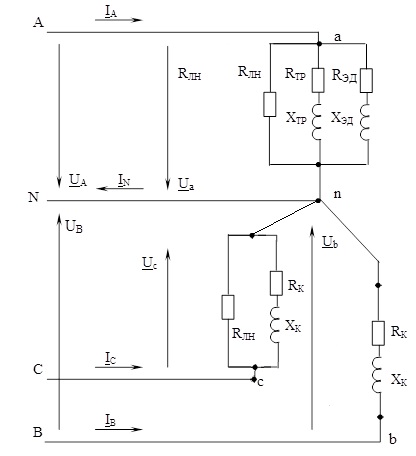
ЗАДАНИЕ № 2 «РАСЧЕТ ТРЁХФАЗНОЙ ЦЕПИ»
3.1. Внутри здания сети внутреннего электроснабжения выполнены по схеме "звезда" с нейтральным проводом. Отдельные помещения подключены к разным фазам трехфазного источника электроэнергии с линейным напряжением Uл = 380 В и частотой тока f = 50 Гц. На основании данных табл. 3.1 - 3.2 определить для своего варианта (последняя цифра трехзначного варианта из предыдущего задания – номер строки в табл. 3.2, предпоследняя цифра – номер строки в табл. 3.1) нагрузку каждой фазы, причем электропотребители в фазе включаются параллельно. Считая лампу накачивания (ЛН) активной нагрузкой, калорифер (К), электродвигатель (ЭД) и трансформатор (ТР) активно-индуктивной нагрузкой, начертить электрическую схему замещения рассчитываемой трехфазной цепи для своего варианта.
3.2. Выполнить анализ электрического состояния полученной в п. 3.1 схемы при наличии нейтрального провода:
1) определить активное, реактивное и полное сопротивления каждого электропотребителя;
2) рассчитать токи, протекающие через каждый электропотребитель (токи в параллельных ветвях каждой фазы);
3) определить для каждой фазы полное сопротивление, активную, реактивную и полную мощность, коэффициент мощности;
4) рассчитать линейные токи и ток в нейтральном проводе;
5) определить для всей трехфазной нагрузки активную PН, реактивную QН и полную SН мощности, коэффициент мощности cos φH и составить баланс мощностей;
6) построить в масштабе совмещенную векторную диаграмму напряжений и токов.
Таблица 3.1. Вид нагрузки в фазах
| Номер строки |
Электроприемники в фазах |
| Фаза A |
Фаза B |
Фаза C |
| 8 |
ЛН, ТР, ЭД |
К |
ЛН, К |
Таблица 3.2. Параметры нагрузки
| Номер строки |
ЛН |
К |
ТР |
Эд |
| PЛН |
PК |
cos φК |
SТР |
cos φТР |
PЭД |
КПД |
cos φЭД |
| 8 |
75 |
1600 |
0,96 |
160 |
0,5 |
400 |
0,70 |
0,75 |
3.3. Примечания:
1. Для всех токов и напряжений определить действующее значение и начальную фазу.
2. На схеме замещения изображать активную нагрузку в виде резистора, активно-индуктивную нагрузку в виде последовательного соединения резистора и идеальной индуктивной катушки.
3. Баланс мощностей должен сойтись с погрешностью менее 1%.
|
Электротехника |
|
|
300₽ |
|
|
10640 |
Определение реакций опор составной конструкции (система двух тел)
Найти реакции опор и давление в промежуточном шарнире составной конструкции. Схемы конструкций представлены на рис. 18-20 (размеры в метрах), нагрузка указана в табл. 4.
| Вариант |
G |
P |
M, кН∙м |
q, кН∙м |
| кН |
| 2 |
5 |
8 |
60 |
- |
|
Теоретическая механика |
|
|
300₽ |
|
|
14612 |
ПЛОСКО-ПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Для заданного положения механизма найти скорости точек В и С, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис. К6.1-К6.20
OA = 30 см = 0,30 м; AB = 50 см = 0,50 м; AC = 25 см = 0,25 м; ωOA = 3 c-1.
|
Теоретическая механика |
K6.7 |
Теоретическая механика 2 |
300₽ |
|
|
8586 |
ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
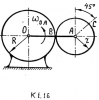
Угол наклона полного ускорения точки обода махового колеса к радиусу равен 60°. Касательное ускорение точки в данный момент $a_\tau = 20 \sqrt 3$ м/с2. Найти нормальное и полное ускорение точки, отстоящей от оси вращения на расстоянии r = 0,5 м. Радиус махового колеса R = 0,8 м.
|
Теоретическая механика |
K4.11 |
Теоретическая механика 2 |
300₽ |
|
|
16580 |

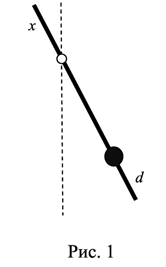
Физический маятник представляет собой тонкий однородный стержень длиной l = 1 м и массой m, на котором жестко закреплена материальная точка массой M на расстоянии d (d < l/2) от нижнего конца стержня. Точка подвеса маятника находится на расстоянии x (x < l/2) от верхнего конца стержня (рис. 1). Найти зависимость периода малых колебаний T маятника от расстояния x и построить график этой зависимости T(x) в интервале изменения x от 0 до l/2. Определить по графику минимальное значение периода T колебаний маятника. Ускорение свободного падения g = 9,81 м/c2.
| № варианта |
d, M/m |
| 8 |
d = 0,2 м, M/m = 0,5 |
|
Механика |
|
|
300₽ |
|
|
14694 |
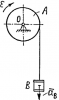
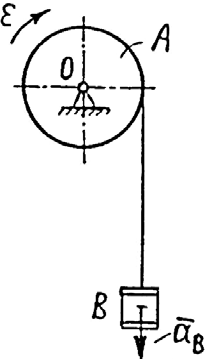
На однородный цилиндр A массой m1 намотана нить, на которой подвешен груз B массой m2. Определить давление цилиндра на ось, если груз опускается по вертикали из состояния покоя с ускорением a = 0,3g.
|
Теоретическая механика |
Д4.11 |
Теоретическая механика 2 |
300₽ |
|
|
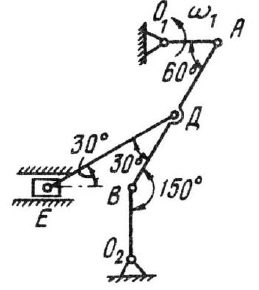
5040 |
 ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
На рис. К3.8 показаны схемы механизмов, причем
О1А = L1 = 0,4 м;
АВ = L2 = 1,4 м;
ДE = L3 = 1,2 м;
02В = L4 = 0,6 м;
АД = ДВ.
Кривошип O1А вращается вокруг оси O1 с постоянной угловой скоростью ω1 = ωOA =4 с-1. Для заданного положения механизма построить мгновенные центры скоростей шатунов АВ и ДЕ, найти скорости точек А, В, Д, Е, угловые скорости указанных шатунов и кривошипа О2В, а также ускорение точки В.
|
Теоретическая механика |
K5.8 |
Теоретическая механика 2 |
300₽ |
|
|
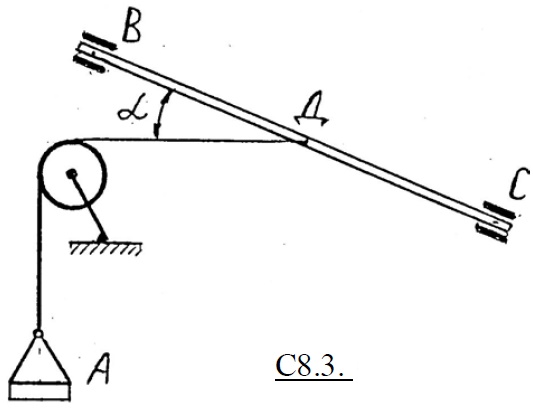
11124 |
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
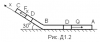
Расчетные схемы даны на рис. С8.3. Определить наименьший вес Qmin груза A, при котором возможно равновесие однородной балки ВС весом P. Коэффициент трения между балкой BC и втулкой B равен f; трение во втулке C не учитывать. Угол наклона балки к горизонту равен α; BD = DC.
|
Теоретическая механика |
C8.3 |
Теоретическая механика 2 |
300₽ |
|
|
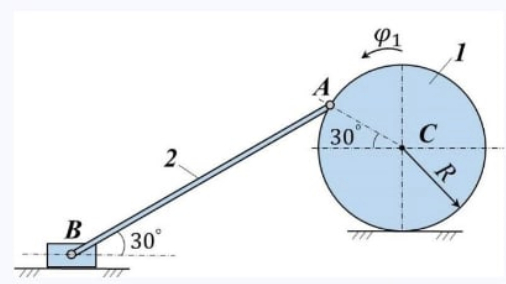
14300 |

Для заданного механизма дано: R = 0,3 м, АВ = 1 м, $\varphi_1(t)=\frac{\sqrt{3}}{6}(2t-t^2)+t$ рад.
Колесо катится без проскальзывания. Полагая, что в этот момент времени механизм занимает положение, указанное на рисунке, определить:
1) модуль скорости точки А;
2) модуль скорости точки B;
3) модуль угловой скорости звена AB;
4) направление вращения звена АB.
|
Теоретическая механика |
Д7.21 |
Теоретическая механика 2 |
300₽ |
|
|
12362 |
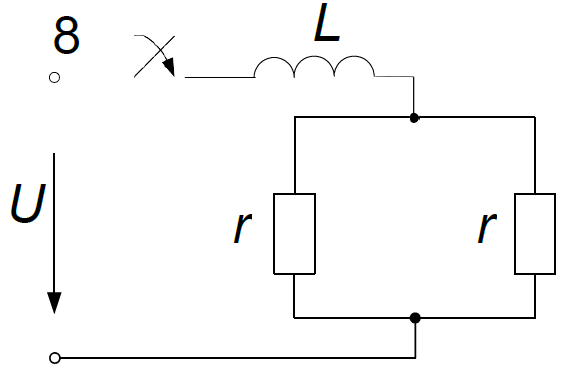
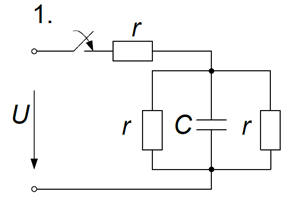
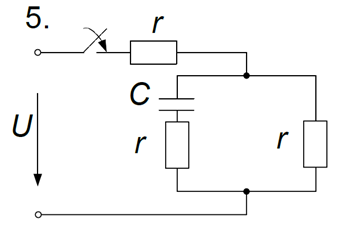
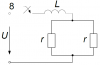
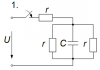
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
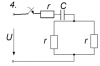
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 8 |
20 |
- |
35 |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
184 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
11204 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.3 |
6t2 - 3 |
3t |
1 |
|
Теоретическая механика |
K1.3 |
Теоретическая механика 2 |
300₽ |
|
|
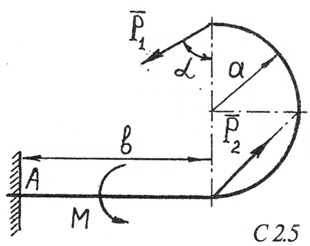
8338 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.5 -исходные данные приведены в таблице 2.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С-2.5 |
6 |
5 |
6 |
0,8 |
1 |
- |
60° |
|
Теоретическая механика |
С-2.5 |
Теоретическая механика |
300₽ |
|
|
12442 |
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 3 |
20 |
250 |
- |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
138 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
10500 |
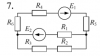
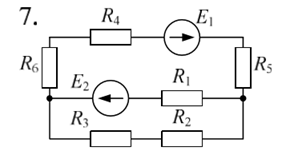
Расчет разветвленной линейной электрической цепи постоянного тока с несколькими источниками электрической энергии.
Для электрической цепи, вариант которой соответствует последней цифре учебного шифра студента и изображенной на рис. 2, выполнить следующее:
1. Составить уравнения для определения токов путем непосредственного применения законов Кирхгофа (указав, для каких узлов и контуров эти уравнения записаны). Решать эту систему уравнений не следует.
2. Определить токи в ветвях методом контурных токов.
3. Определить режимы работы активных элементов и составить баланс мощностей.
Значения ЭДС источников и сопротивлений приемников приведены в табл. 2.
| Предпоследняя цифра учебного шифра студента |
E1, В |
E2, В |
R1, Ом |
R2, Ом |
R3, Ом |
R4, Ом |
R5, Ом |
R6, Ом |
| 2 |
70 |
190 |
17 |
12 |
8 |
13 |
17 |
10 |
|
Электротехника |
227 |
МИИТ. Общая электротехника и электроника. 2016 год |
300₽ |
|
|
14470 |
Дана плотность распределения случайного вектора
$$f(x,y)=\left\{\begin{array}{ll}
C(x+2xy+2y^2), & x, y \in [0,1] \\
0, & x, y \notin [0, 1]
\end{array} \right. $$
Найти константу С и вероятность того, что случайный вектор (X, Y) принадлежит треугольнику с вершинами в точках (0, 0), (1, 2), (0, 1). Являются ли X и Y зависимыми величинами? Найти координаты центра рассеивания и функцию распределения.
|
Теория вероятностей |
|
|
300₽ |
|
|
8422 |

ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.13, -исходные данные приведены в таблице 2.
Таблица 2
| Номер варианта |
Р, кН |
М, кН∙м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С-2.13 |
12 |
10 |
6 |
1 |
- |
- |
30° |
|
Теоретическая механика |
C2.13 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
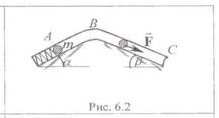
18265 |

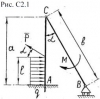
Шарик массы m движется из положения A внутри изогнутой трубки, расположенной в вертикальной плоскости. Шарик, пройдя путь l0, отделяется oт пружины. В точке B шарик, не меняя значения своей скорости, переходит на участок BC, где на него дополнительно действует переменная сила F, направление которой указано на рисунке. Пользуясь общими теоремами динамики точки, определить скорость шарика в положениях B и C. В задании принята следующие обозначения: vA - начальная скорость шарика, AB - длина участка, τ - время движения на участке BC, f - коэффициент трения скольжения шарика по стенке трубки, c - коэффициент жесткости пружины.
| № |
Рис. |
m |
vA |
f |
AB |
l0 |
c |
α |
β |
τ |
F(t) |
| 2 |
|
кг |
м/с |
|
м |
см |
Н/см |
град |
с |
Н |
| 6.2 |
0,5 |
3 |
0,1 |
0,3 |
15 |
0,98 |
30 |
45 |
0,5 |
sin 0,3t |
|
Механика |
|
|
300₽ |
|
|
5113 |
 ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. С3.6 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| С3.15 |
2, 11, 4 |
6, 7 |
90 |
140 |
|
Теоретическая механика |
C3.15_1 |
Теоретическая механика |
300₽ |
|
|
9706 |
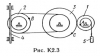
КИНЕМАТИКА
Механизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза S, привязанного к концу нити, намотанной на одно из колес (рис K2.0 — K2 9, табл. K2). Радиусы ступеней колес равны соответственно у колеса 1 — r1 = 2 см, R1 = 4 см, у колеса 2 — r2 = 6 см, R2 = 8 см, у колеса 3 — r3 = 12 см, R3 = 16 см. На ободьях колес расположены точки A, B и C.
| Номер условия |
Дано |
Найти |
| скорости |
ускорения |
| 0 |
S4 = 4(7t - t2) |
vB, vC |
ε2, aA, a5 |
В столбце «Дано» таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где S4(t) — закон движения рейки 4, v4(t) — закон изменения скорости колеса 2, vC(t) — закон изменения скорости колеса 3 и т д (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s4, s5 и v4, v5 — вниз.
Определить в момент времени t1 = 2 с указанные в таблице в столбцах «Найти» скорости (v — линейные, ω — угловые) и ускорения (a — линейные, ε — угловые) соответствующих точек или тел (v5— скорость груза 5 и т.д.).
|
Теоретическая механика |
|
|
300₽ |
|
|
8520 |
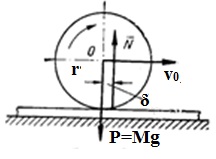
Оси колеса радиусом r, находящемуся на горизонтальной плоскости, сообщили скорость V0. Коэффициент трения качения равен δ. Определить путь, пройденный колесом до остановки. Качение колеса происходит без скольжения. Колесо считать однородным диском.
|
Теоретическая механика |
D4.10 |
Теоретическая механика |
300₽ |
|
|
10980 |
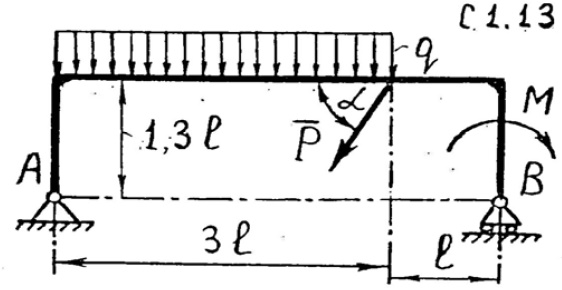
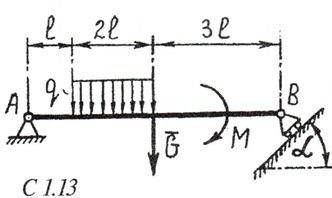
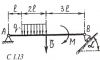
СОСТАВЛЕНИЕ РАСЧЕТНОЙ СХЕМЫ ПЛОСКОЙ КОНСТРУКЦИИ
Используя принцип освобождаемости от связей, освободить плоскую конструкцию от связей и приложить к ней реакции связей. Равномерно-распределенную нагрузку заменить соответствующей равнодействующей силой. Силы, не параллельные осям координат, разложить на составляющие, параллельные осям координат. Построить расчетную схему конструкции. Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. C1.13, исходные данные приведены в табл. 1.
| Номер варианта |
Р, кН |
G, кН |
M, кН∙м |
q, кН∙м |
l, м |
α, град |
| C1.13 |
8 |
- |
3 |
6 |
1 |
60° |
|
Теоретическая механика |
C1.13 |
Теоретическая механика 2 |
300₽ |
|
|
11872 |
Определить ускорения тел и силу натяжения нити (рис.2.1). Массы тел равны m1 = 4 кг, m2 = 3 кг, m3 = 2 кг, коэффициент трения μ = 0,25, угол α = 30°, F = 50 Н. Постройте график зависимости ускорения от угла, определите критический угол, при котором движение системы будет равномерным, какие при этом будут силы натяжения нитей.
|
Механика |
|
|
300₽ |
|
|
11060 |
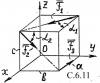
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллелепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C6.11 |
Теоретическая механика 2 |
300₽ |
|
|
12296 |
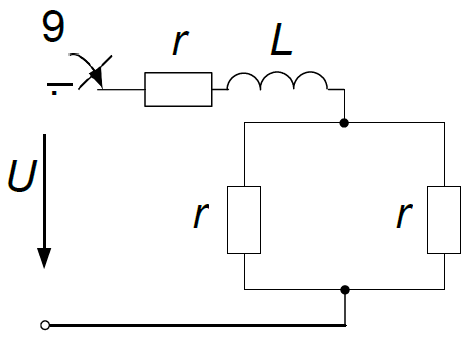
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 5 |
15 |
- |
60 |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
151 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
6487 |
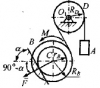
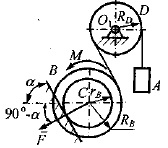
ПРИМЕНЕНИЕ ТЕОРЕМЫ ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ К ИЗУЧЕНИЮ ДВИЖЕНИЯ МЕХАНИЧЕСКОЙ СИСТЕМЫ
Механическая система, изображенная на рисунке, приводится в движение из состояния покоя. При этом колесо B катится без скольжения по вертикальной плоскости. Массы тел A, B и D (mA, mB, mD), заданная нагрузка F и M, радиус инерции ρB колеса B. Радиусы колеса B и шкива D соответственно равны RB = 0,8 м, RD = 0,2 м, rB = 0,5 м. Угол α имеет значение: α = 30°. Коэффициент трения качения колеса B равен k = 0,05∙RB; коэффициент трения скольжения тела B равен f = 0,1. Используя теорему об изменении кинетической энергии системы, определить скорость и ускорение тела A после того, как оно переместится на расстояние SA = 2 м. Шкив D считать однородным сплошным диском; силами сопротивления в подшипниках, массой троса, его растяжением и проскальзыванием по ободу шкива пренебречь.
| Номер варианта |
№ Дано |
mA, кг |
mB, кг |
mD, кг |
M, Н∙м |
F, Н |
ρB, см |
| 20 |
4 |
8 |
50 |
10 |
10 |
400 |
0.4 |
|
Теоретическая механика |
|
|
300₽ |
|
|
11140 |
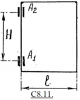
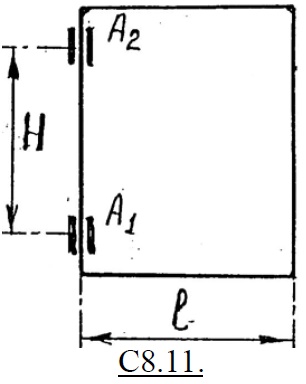
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
Расчетные схемы даны на рис. С8.11. Однородная горизонтальная рама, состоящая из четырех однородных стержней, удерживается в вертикальном положении силами трения во втулках A1 и А2. Коэффициент трения в этих втулках соответственно равны f1 и f2. Определить наибольшее расстояние Н между втулками, если длина горизонтального стержня равна l.
|
Теоретическая механика |
C8.11 |
Теоретическая механика 2 |
300₽ |
|
|
8242 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. C1.13, исходные данные приведены в табл. 1.
| Номер варианта |
P, кН |
G, кН |
M, кНм |
q, кН/м |
l, м |
α, град |
| C1.13 |
- |
10 |
4 |
3 |
1 |
45° |
|
Теоретическая механика |
C1.13 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
12378 |

РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 7 |
30 |
- |
125 |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
175 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
11220 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.11 |
3t |
5 - 3t2 |
2 |
|
Теоретическая механика |
K1.11 |
Теоретическая механика 2 |
300₽ |
|
|
8354 |

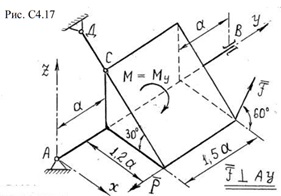
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунках С4.17.
|
Теоретическая механика |
K4.17 |
Теоретическая механика |
300₽ |
|
|
12458 |

РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 2 |
25 |
100 |
- |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
129 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
14800 |
Груз D массой m, получив в точке A начальную скорость v0, движется в изогнутой трубе АВС, расположенной в вертикальной плоскости; участки трубы или оба наклонные, или один горизонтальный, а другой наклонный (рис.3.1, табл. 3.2).
На участке АВ на груз кроме силы тяжести действуют постоянная сила Q (ее направление показано на рисунках).
В точке B груз, не изменяя своей скорости, переходит на участок BC трубы, где на него кроме силы тяжести действует переменная сила F, проекция которой Fx на ось х задана в таблице.
Считая груз материальной точкой и зная время t1 движения груза от точки A до точки B, найти скорость груза на участке BC через t2 = 2 сек. после выхода из точки B. Трением груза о трубу пренебречь.
| Вариант |
m, кг |
v0, м/c |
Q, Н |
t1, с |
Fx, Н |
| 2 |
8 |
10 |
16 |
3 |
3t2 - 1 |
|
Теоретическая механика |
Д1-2 |
Методичка по термеху. Нижний Новгород. 2019 год |
300₽ |
|
|
8442 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. С2.1, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С2.1_1 |
5 |
4.4 |
3 |
2.8 |
2.3 |
1.5 |
30° |
|
Теоретическая механика |
C2.1_1 |
Теоретическая механика |
300₽ |
|