|
11116 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунке.
|
Теоретическая механика |
c7.19 |
Теоретическая механика 2 |
300₽ |
|
|
11118 |

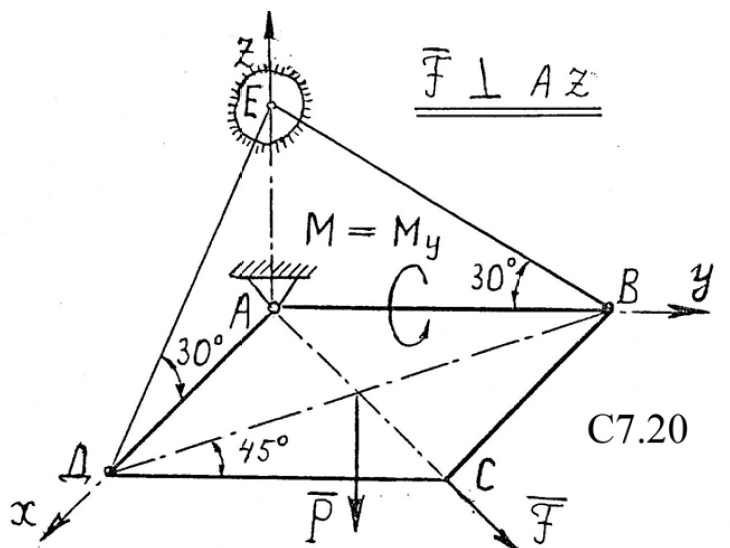
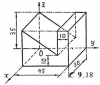
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунке.
|
Теоретическая механика |
C7.20 |
Теоретическая механика 2 |
300₽ |
|
|
11120 |
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
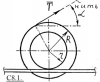
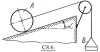
Расчетные схемы даны на рис. С8.1. Найти наибольшую величину силы Tmax, при приложении которой к катушке весом P при помощи нити начнется ее качение по горизонтальной плоскости. Радиусы катушки равны r и R, а ее коэффициент трения качения равен δ.
|
Теоретическая механика |
C8.1 |
Теоретическая механика 2 |
300₽ |
|
|
11122 |
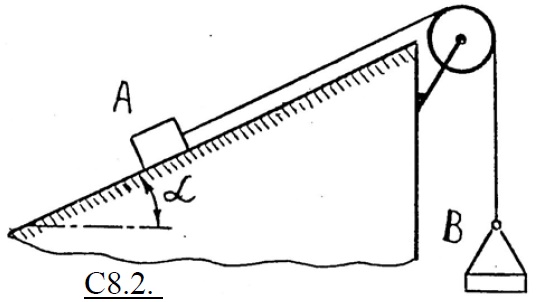
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
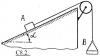
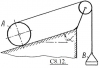
Расчетные схемы даны на рис. С8.2. Груз A весом P лежит на наклонной плоскости с углом α. Определить наибольший вес Qmax груза B, при котором возможно равновесие, если коэффициент трения между грузом A и плоскостью равен f.
|
Теоретическая механика |
C8.2 |
Теоретическая механика 2 |
300₽ |
|
|
11124 |
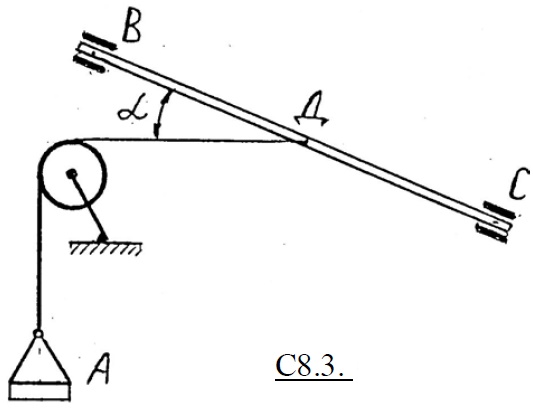
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
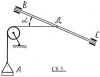
Расчетные схемы даны на рис. С8.3. Определить наименьший вес Qmin груза A, при котором возможно равновесие однородной балки ВС весом P. Коэффициент трения между балкой BC и втулкой B равен f; трение во втулке C не учитывать. Угол наклона балки к горизонту равен α; BD = DC.
|
Теоретическая механика |
C8.3 |
Теоретическая механика 2 |
300₽ |
|
|
11126 |
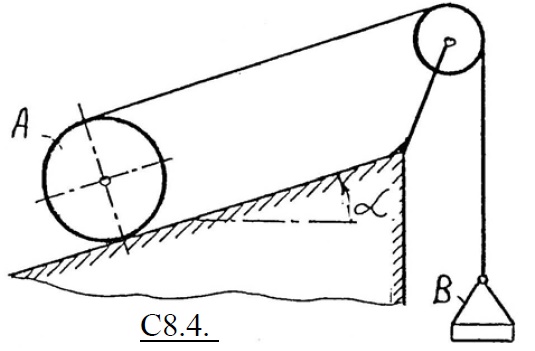
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
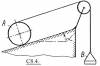
Расчетные схемы даны на рис. С8.4. Каток A радиуса r и весом P лежит на наклонной плоскости с утлом α. Определить наименьший вес Qmin груза B, при котором возможно равновесие, если коэффициент трения качения катка равен δ.
|
Теоретическая механика |
C8.4 |
Теоретическая механика 2 |
300₽ |
|
|
11128 |

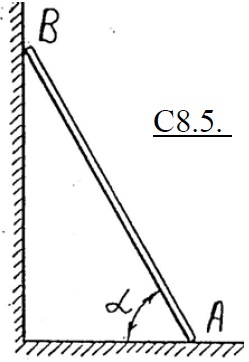
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
Расчетные схемы даны на рис. С8.5. Однородный брус AB опирается в точке A на негладкий пол, а в точке B - на гладкую стену. Определить наименьший коэффициент трения между брусом и полом, при котором брус останется в равновесии. Угол наклона бруса к горизонтали равен α.
|
Теоретическая механика |
C8.5 |
Теоретическая механика 2 |
300₽ |
|
|
11130 |
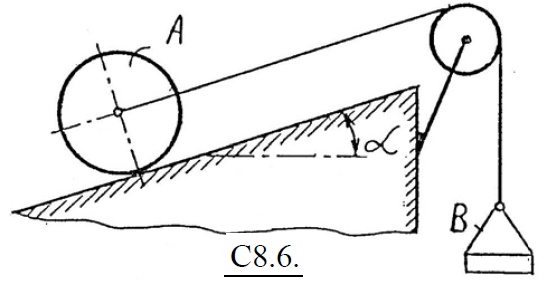
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
Расчетные схемы даны на рис. С8.6. Каток A радиуса r и весом Р лежит на наклонной плоскости с углом α. Определить наибольший вес груза Qmax груза B, при котором возможно равновесие, если коэффициент трения качения катка равен δ.
|
Теоретическая механика |
C8.6 |
Теоретическая механика 2 |
300₽ |
|
|
11132 |

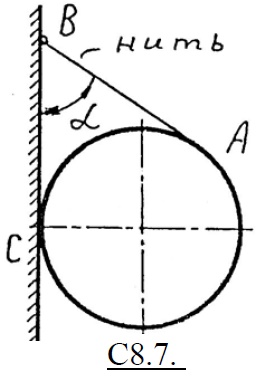
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
Расчетные схемы даны на рис. С8.7. Тяжелое однородное кольцо удерживается в равновесии нитью AB и силой трения, возникающей в точке C его контакта со стеной. При каком соотношении между коэффициентом трения f и утлом α это возможно? (α - угол наклона нити AB к вертикали).
|
Теоретическая механика |
C8.7 |
Теоретическая механика 2 |
300₽ |
|
|
11134 |

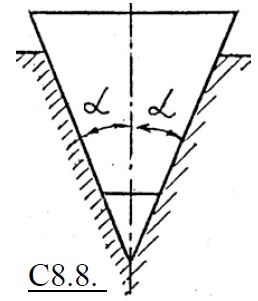
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
Расчетные схемы даны на рис. С8.8. Клин с углом 2α находится в углублении. Установить, удержат ли силы трения клин в углублении или же он будет вытолкнут обратно. Коэффициент трения равен f.
|
Теоретическая механика |
C8.8 |
Теоретическая механика 2 |
300₽ |
|
|
11136 |
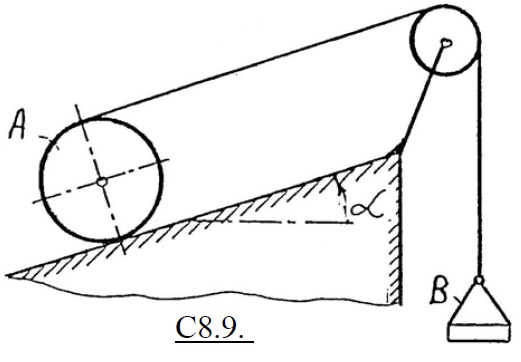
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
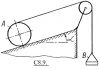
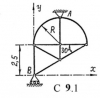
Расчетные схемы даны на рис. С8.9. Каток A радиуса r и весом P лежит на наклонной плоскости с углом α. Определить наибольший вес груза Qmax груза B, при котором возможно равновесие, если коэффициент трения качения катка равен δ.
|
Теоретическая механика |
C8.9 |
Теоретическая механика 2 |
300₽ |
|
|
11138 |
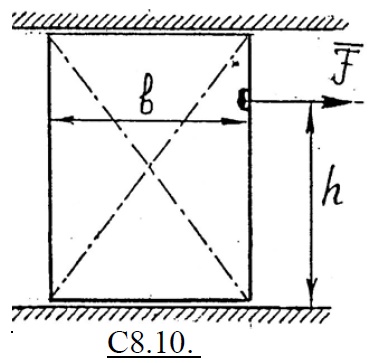
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
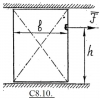
Расчетные схемы даны на рис. С8.10. Дверь в купе железнодорожного вагона может скользить в горизонтальных желобах, расположенных сверху и снизу. Коэффициент трения между дверью и нижним желобом равен f. Центр тяжести двери лежит на оси симметрии. Найти наибольшую высоту h ручки двери, при которой дверь не будет перекашиваться в желобах, если ее вес равен G, а ширина равна b.
|
Теоретическая механика |
C8.10 |
Теоретическая механика 2 |
300₽ |
|
|
11140 |
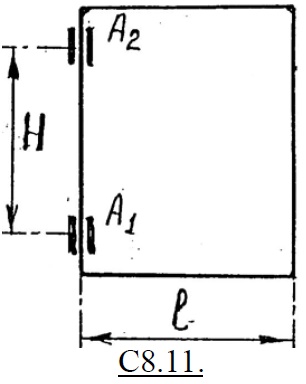
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
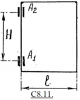
Расчетные схемы даны на рис. С8.11. Однородная горизонтальная рама, состоящая из четырех однородных стержней, удерживается в вертикальном положении силами трения во втулках A1 и А2. Коэффициент трения в этих втулках соответственно равны f1 и f2. Определить наибольшее расстояние Н между втулками, если длина горизонтального стержня равна l.
|
Теоретическая механика |
C8.11 |
Теоретическая механика 2 |
300₽ |
|
|
11142 |
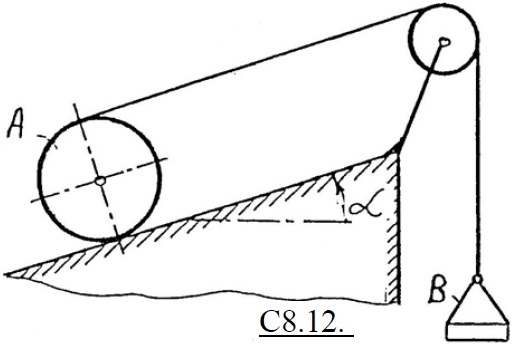
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
Расчетные схемы даны на рис. С8.12. Каток радиуса весом P лежит на наклонной плоскости с утлом α. Определить наименьший вес Qmin груза B, при котором возможно равновесие, если коэффициент трения качения катка равен δ.
|
Теоретическая механика |
C8.12 |
Теоретическая механика 2 |
300₽ |
|
|
11144 |
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
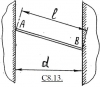
Расчетные схемы даны на рис. С8.13. Однородный стержень AB длиной l опирается концом A на гладкую стену, а другим B - на шероховатую стену. Расстояние между стенами равно d, причем d < l. Определить коэффициент трения f между стеной и стержнем, при котором возможно равновесие стержня.
|
Теоретическая механика |
C8.13 |
Теоретическая механика 2 |
300₽ |
|
|
11146 |
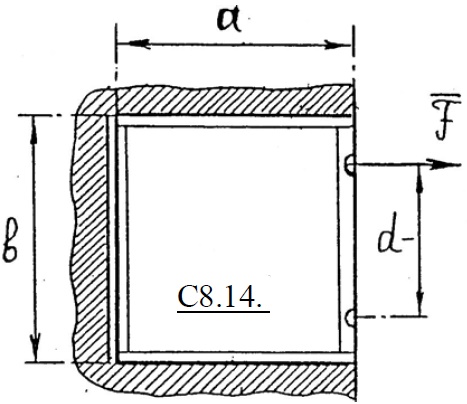
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
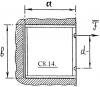
Расчетные схемы даны на рис. С8.14. Ящик стола имеет две симметрично расположенные ручки для выдвигания. Каково должно быть расстояние d между этими ручками, чтобы ящик при выдвигании не застревал? Ширина ящика и его длина соответственно a, b. Коэффициент трения скольжения равен f. Весом ящика пренебречь.
|
Теоретическая механика |
C8.14 |
Теоретическая механика 2 |
300₽ |
|
|
11148 |
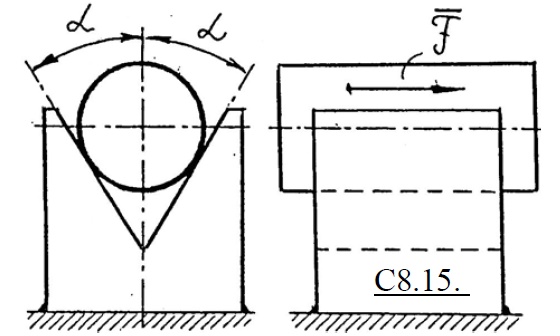
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
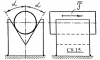
Расчетные схемы даны на рис. С8.15. Круговой цилиндр весом G лежит в горизонтальной щели с углом 2α. Определить величину горизонтальной силы F, при приложении которой к цилиндру начнется его скольжение. Коэффициент трения равен f.
|
Теоретическая механика |
C8.15 |
Теоретическая механика 2 |
300₽ |
|
|
11150 |
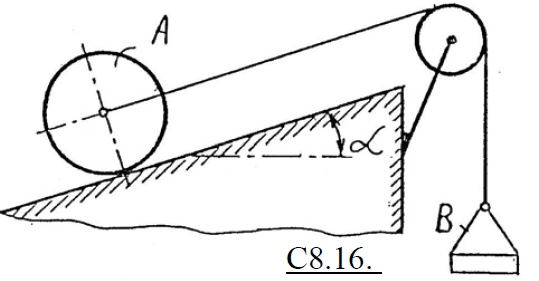
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
Расчетные схемы даны на рис. С8.16. Каток A радиуса r и весом P лежит на наклонной плоскости с утлом α. Определить наименьший вес Qmin груза B, при котором возможно равновесие, если коэффициент трения качения катка равен δ.
|
Теоретическая механика |
C8.16 |
Теоретическая механика 2 |
300₽ |
|
|
11152 |
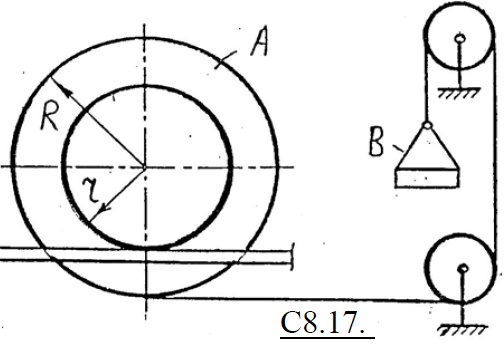
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
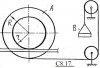
Расчетные схемы даны на рис. С8.17. Катушка A весом P лежит на горизонтальной плоскости. Определить наибольший вес Qmax груза B, при котором возможно равновесие. Радиусы катушки равны r и R, а ее коэффициент трения качения равен δ.
|
Теоретическая механика |
C8.17 |
Теоретическая механика 2 |
300₽ |
|
|
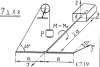
11154 |
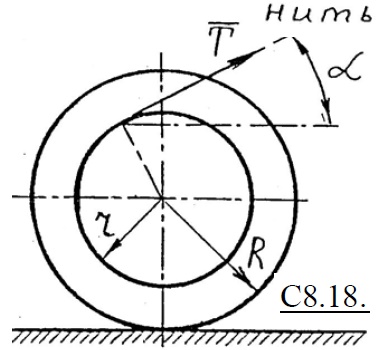
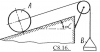
Расчетные схемы даны на рис. С8.18. Найти наибольшую величину силы Tmax, при приложении которой к катушке весом P при помощи нити начнется ее качение по горизонтальной плоскости. Радиусы катушки равны r и R, а ее коэффициент трения качения равен δ.
|
Теоретическая механика |
C8.18 |
Теоретическая механика 2 |
300₽ |
|
|
11156 |
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
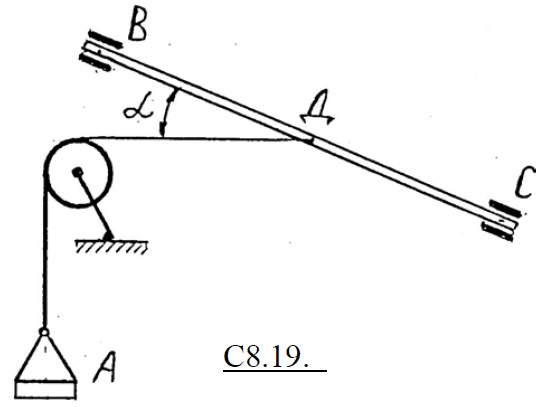
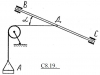
Расчетные схемы даны на рис. С8.19. Определить наибольший вес Qmax груза A, при котором возможно равновесие однородной балки ВС весом P. Коэффициент трения между балкой BC и втулкой B равен f; трение во втулке C не учитывать. Угол наклона балки к горизонту равен α; BD=DC.
|
Теоретическая механика |
C8.19 |
Теоретическая механика 2 |
300₽ |
|
|
11158 |
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
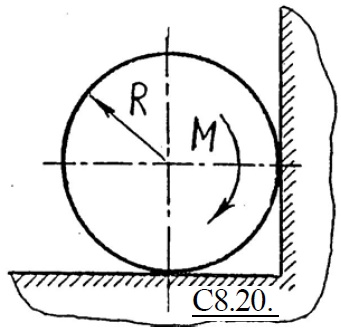
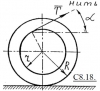
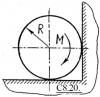
Расчетные схемы даны на рис. С8.20. Цилиндр радиуса R и весом P лежит на шероховатой плоскости и упирается в шероховатую стену. При каком моменте М пары сил, приложенных к цилиндру, он будет находиться в равновесии? Коэффициент трения скольжения цилиндра по плоскости равен f.
|
Теоретическая механика |
C8.20 |
Теоретическая механика 2 |
300₽ |
|
|
11160 |
ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ОДНОРОДНОГО ТЕЛА
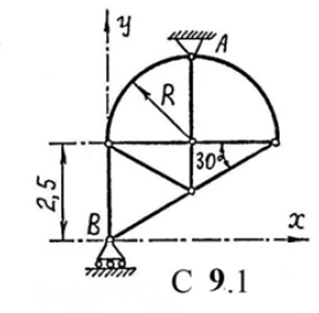
Найти положение центра тяжести плоской фермы, пластинки и объемного тела. Ферма состоит из однородных стержней; пластинка имеет малую постоянную толщину. Схемы тел показаны на рис. C9.1. Размеры ферм даны в метрах, остальных тел - в сантиметрах.
|
Теоретическая механика |
C9.1 |
Теоретическая механика 2 |
300₽ |
|
|
11162 |
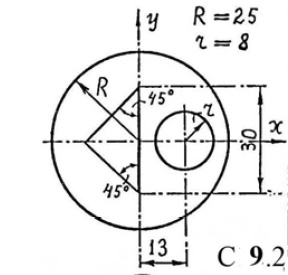
ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ОДНОРОДНОГО ТЕЛА
Найти положение центра тяжести плоской фермы, пластинки и объемного тела. Ферма состоит из однородных стержней; пластинка имеет малую постоянную толщину. Схемы тел показаны на рис. C9.2. Размеры ферм даны в метрах, остальных тел - в сантиметрах.
|
Теоретическая механика |
C9.2 |
Теоретическая механика 2 |
300₽ |
|
|
11164 |
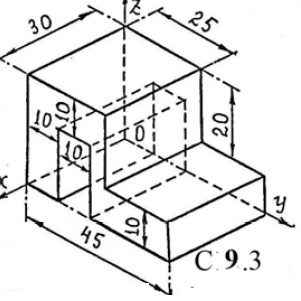
ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ОДНОРОДНОГО ТЕЛА
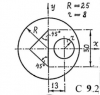
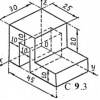
Найти положение центра тяжести плоской фермы, пластинки и объемного тела. Ферма состоит из однородных стержней; пластинка имеет малую постоянную толщину. Схемы тел показаны на рис. C9.3. Размеры ферм даны в метрах, остальных тел - в сантиметрах.
|
Теоретическая механика |
C9.3 |
Теоретическая механика 2 |
300₽ |
|
|
11166 |
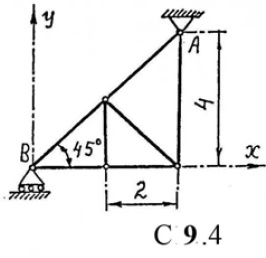
ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ОДНОРОДНОГО ТЕЛА
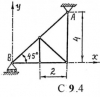
Найти положение центра тяжести плоской фермы, пластинки и объемного тела. Ферма состоит из однородных стержней; пластинка имеет малую постоянную толщину. Схемы тел показаны на рис. C9.4. Размеры ферм даны в метрах, остальных тел - в сантиметрах.
|
Теоретическая механика |
C9.4 |
Теоретическая механика 2 |
300₽ |
|
|
11168 |
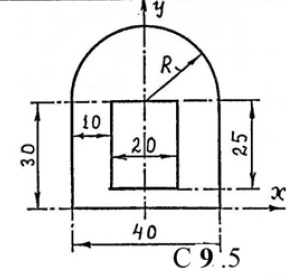
ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ОДНОРОДНОГО ТЕЛА
Найти положение центра тяжести плоской фермы, пластинки и объемного тела. Ферма состоит из однородных стержней; пластинка имеет малую постоянную толщину. Схемы тел показаны на рис. C9.5. Размеры ферм даны в метрах, остальных тел - в сантиметрах.
|
Теоретическая механика |
C9.5 |
Теоретическая механика 2 |
300₽ |
|
|
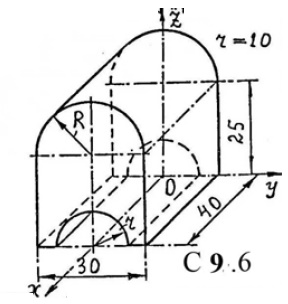
11170 |
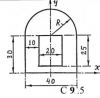
Найти положение центра тяжести плоской фермы, пластинки и объемного тела. Ферма состоит из однородных стержней; пластинка имеет малую постоянную толщину. Схемы тел показаны на рис. C9.6. Размеры ферм даны в метрах, остальных тел - в сантиметрах.
|
Теоретическая механика |
C9.6 |
Теоретическая механика 2 |
300₽ |
|
|
11172 |

ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ОДНОРОДНОГО ТЕЛА
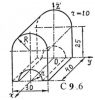
Найти положение центра тяжести плоской фермы, пластинки и объемного тела. Ферма состоит из однородных стержней; пластинка имеет малую постоянную толщину. Схемы тел показаны на рис. C9.7. Размеры ферм даны в метрах, остальных тел - в сантиметрах.
|
Теоретическая механика |
C9.7 |
Теоретическая механика 2 |
300₽ |
|
|
11174 |

ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ОДНОРОДНОГО ТЕЛА
Найти положение центра тяжести плоской фермы, пластинки и объемного тела. Ферма состоит из однородных стержней; пластинка имеет малую постоянную толщину. Схемы тел показаны на рис. C9.8. Размеры ферм даны в метрах, остальных тел - в сантиметрах.
|
Теоретическая механика |
C9.8 |
Теоретическая механика 2 |
300₽ |
|
|
11176 |
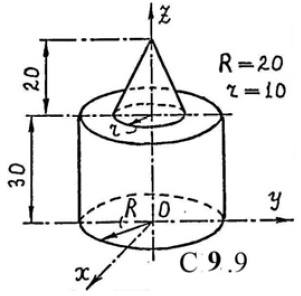
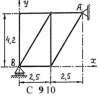
ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ОДНОРОДНОГО ТЕЛА
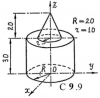
Найти положение центра тяжести плоской фермы, пластинки и объемного тела. Ферма состоит из однородных стержней; пластинка имеет малую постоянную толщину. Схемы тел показаны на рис. C9.9. Размеры ферм даны в метрах, остальных тел - в сантиметрах.
|
Теоретическая механика |
C9.9 |
Теоретическая механика 2 |
300₽ |
|
|
11178 |
ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ОДНОРОДНОГО ТЕЛА
Найти положение центра тяжести плоской фермы, пластинки и объемного тела. Ферма состоит из однородных стержней; пластинка имеет малую постоянную толщину. Схемы тел показаны на рис. C9.10. Размеры ферм даны в метрах, остальных тел - в сантиметрах.
|
Теоретическая механика |
C9.10 |
Теоретическая механика 2 |
300₽ |
|
|
11180 |
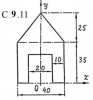
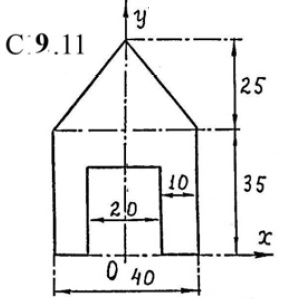
ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ОДНОРОДНОГО ТЕЛА
Найти положение центра тяжести плоской фермы, пластинки и объемного тела. Ферма состоит из однородных стержней; пластинка имеет малую постоянную толщину. Схемы тел показаны на рис. C9.11. Размеры ферм даны в метрах, остальных тел - в сантиметрах.
|
Теоретическая механика |
C9.11 |
Теоретическая механика 2 |
300₽ |
|
|
11182 |
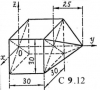
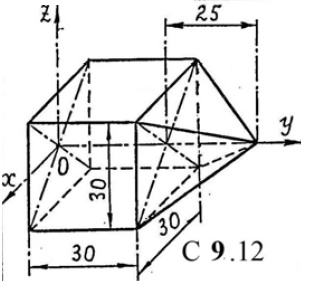
ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ОДНОРОДНОГО ТЕЛА
Найти положение центра тяжести плоской фермы, пластинки и объемного тела. Ферма состоит из однородных стержней; пластинка имеет малую постоянную толщину. Схемы тел показаны на рис. C9.12. Размеры ферм даны в метрах, остальных тел - в сантиметрах.
|
Теоретическая механика |
C9.12 |
Теоретическая механика 2 |
300₽ |
|
|
11184 |
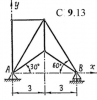
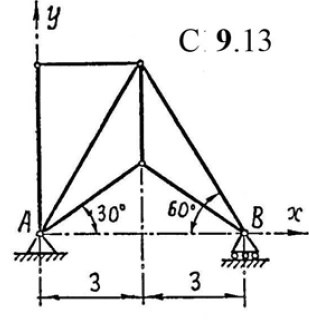
ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ОДНОРОДНОГО ТЕЛА
Найти положение центра тяжести плоской фермы, пластинки и объемного тела. Ферма состоит из однородных стержней; пластинка имеет малую постоянную толщину. Схемы тел показаны на рис. C9.13. Размеры ферм даны в метрах, остальных тел - в сантиметрах.
|
Теоретическая механика |
C9.13 |
Теоретическая механика 2 |
300₽ |
|
|
11186 |
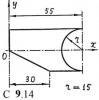
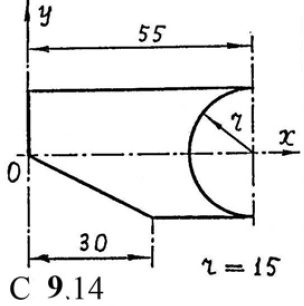
ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ОДНОРОДНОГО ТЕЛА
Найти положение центра тяжести плоской фермы, пластинки и объемного тела. Ферма состоит из однородных стержней; пластинка имеет малую постоянную толщину. Схемы тел показаны на рис. C9.14. Размеры ферм даны в метрах, остальных тел - в сантиметрах.
|
Теоретическая механика |
C9.14 |
Теоретическая механика 2 |
300₽ |
|
|
11188 |
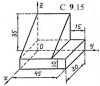
ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ОДНОРОДНОГО ТЕЛА
Найти положение центра тяжести плоской фермы, пластинки и объемного тела. Ферма состоит из однородных стержней; пластинка имеет малую постоянную толщину. Схемы тел показаны на рис. C9.15. Размеры ферм даны в метрах, остальных тел - в сантиметрах.
|
Теоретическая механика |
C9.15 |
Теоретическая механика 2 |
300₽ |
|
|
11190 |
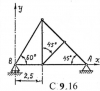
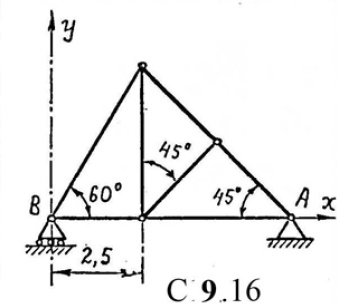
ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ОДНОРОДНОГО ТЕЛА
Найти положение центра тяжести плоской фермы, пластинки и объемного тела. Ферма состоит из однородных стержней; пластинка имеет малую постоянную толщину. Схемы тел показаны на рис. C9.16. Размеры ферм даны в метрах, остальных тел - в сантиметрах.
|
Теоретическая механика |
C9.16 |
Теоретическая механика 2 |
300₽ |
|
|
11192 |
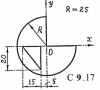
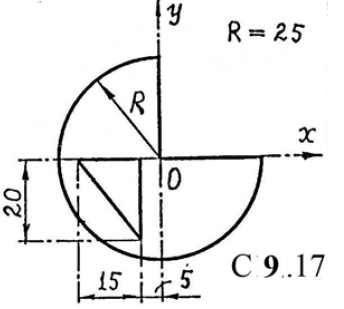
ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ОДНОРОДНОГО ТЕЛА
Найти положение центра тяжести плоской фермы, пластинки и объемного тела. Ферма состоит из однородных стержней; пластинка имеет малую постоянную толщину. Схемы тел показаны на рис. C9.17. Размеры ферм даны в метрах, остальных тел - в сантиметрах.
|
Теоретическая механика |
C9.17 |
Теоретическая механика 2 |
300₽ |
|
|
11194 |
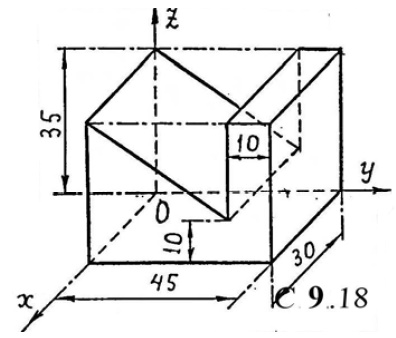
ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ОДНОРОДНОГО ТЕЛА
Найти положение центра тяжести плоской фермы, пластинки и объемного тела. Ферма состоит из однородных стержней; пластинка имеет малую постоянную толщину. Схемы тел показаны на рис. C9.18. Размеры ферм даны в метрах, остальных тел - в сантиметрах.
|
Теоретическая механика |
C9.18 |
Теоретическая механика 2 |
300₽ |
|
|
11196 |
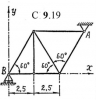
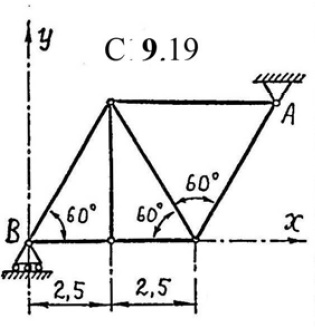
ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ОДНОРОДНОГО ТЕЛА
Найти положение центра тяжести плоской фермы, пластинки и объемного тела. Ферма состоит из однородных стержней; пластинка имеет малую постоянную толщину. Схемы тел показаны на рис. C9.19. Размеры ферм даны в метрах, остальных тел - в сантиметрах.
|
Теоретическая механика |
C9.19 |
Теоретическая механика 2 |
300₽ |
|
|
11198 |
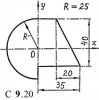
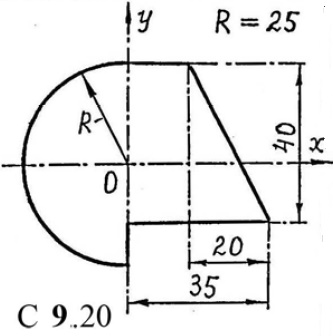
ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ОДНОРОДНОГО ТЕЛА
Найти положение центра тяжести плоской фермы, пластинки и объемного тела. Ферма состоит из однородных стержней; пластинка имеет малую постоянную толщину. Схемы тел показаны на рис. C9.20. Размеры ферм даны в метрах, остальных тел - в сантиметрах.
|
Теоретическая механика |
C9.20 |
Теоретическая механика 2 |
300₽ |
|
|
11200 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.1 |
5t |
2-5t2 |
1 |
|
Теоретическая механика |
K1.1 |
Теоретическая механика 2 |
300₽ |
|
|
11202 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.2 |
3cosπt |
4sinπt |
5/6 |
|
Теоретическая механика |
K1.2 |
Теоретическая механика 2 |
300₽ |
|
|
11204 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.3 |
6t2 - 3 |
3t |
1 |
|
Теоретическая механика |
K1.3 |
Теоретическая механика 2 |
300₽ |
|
|
11206 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.4 |
3cos(πt/3) - 2 |
5sin(πt/3) |
4 |
|
Теоретическая механика |
K1.4 |
Теоретическая механика 2 |
300₽ |
|
|
11208 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.5 |
2t |
t2 - 3 |
2 |
|
Теоретическая механика |
K1.5 |
Теоретическая механика 2 |
300₽ |
|
|
11210 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.6 |
5sin(πt/3) |
3cos(πt/3) - 2 |
2 |
|
Теоретическая механика |
K1.6 |
Теоретическая механика 2 |
300₽ |
|
|
11212 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.7 |
2t |
4t - 6t2 |
1 |
|
Теоретическая механика |
K1.7 |
Теоретическая механика 2 |
300₽ |
|
|
11214 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.8 |
4cos(πt/2) |
3sin(πt/2) |
1,5 |
|
Теоретическая механика |
K1.8 |
Теоретическая механика 2 |
300₽ |
|