|
14482 |

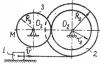
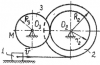
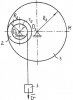
Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
23 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14484 |

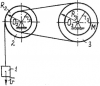
Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
24 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14486 |

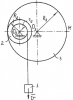
Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
25 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14492 |

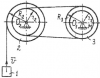
Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
26 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14494 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
27 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14504 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
28 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14506 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
29 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14508 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н ). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
30 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14560 |
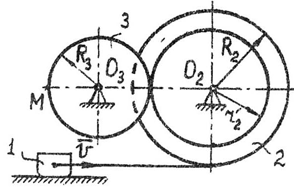
ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
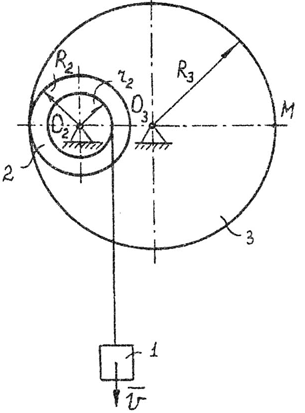
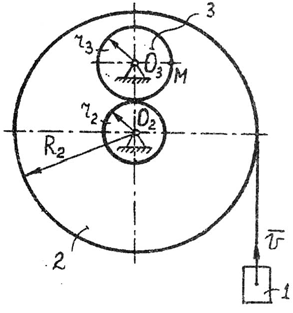
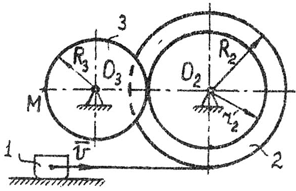
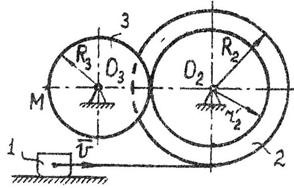
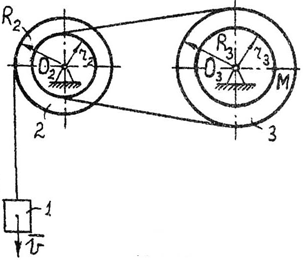
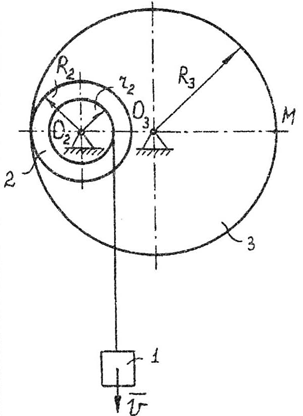
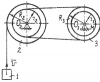
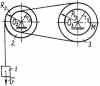
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.1 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.1 |
Теоретическая механика 2 |
300₽ |
|
|
14562 |
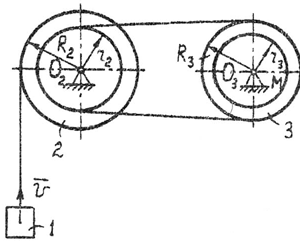
ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
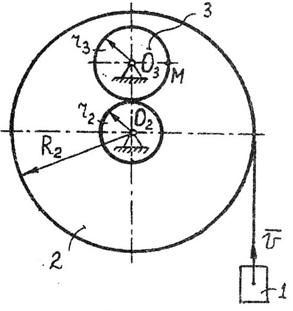
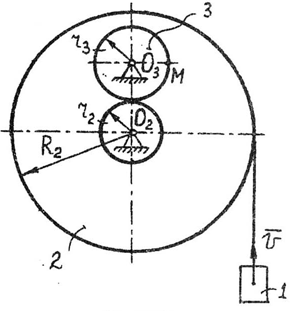
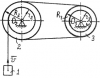
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.2 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.2 |
Теоретическая механика 2 |
300₽ |
|
|
14564 |
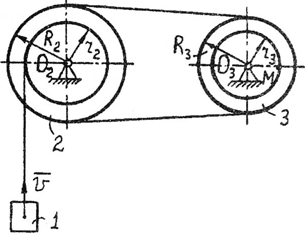
ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
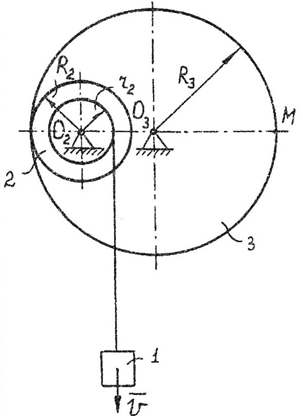
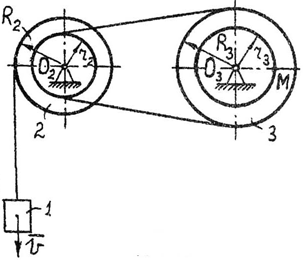
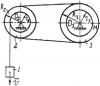
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.3 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.3 |
Теоретическая механика 2 |
300₽ |
|
|
14566 |
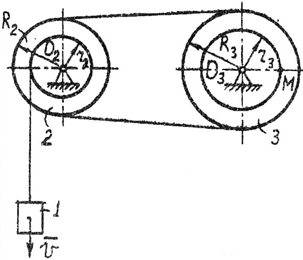
ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
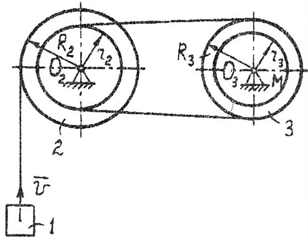
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.4 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.4 |
Теоретическая механика 2 |
300₽ |
|
|
14568 |

ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.5 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.5 |
Теоретическая механика 2 |
300₽ |
|
|
14570 |

ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.6 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.6 |
Теоретическая механика 2 |
300₽ |
|
|
14572 |

ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.7 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.7 |
Теоретическая механика 2 |
300₽ |
|
|
14574 |
ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.8 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.8 |
Теоретическая механика 2 |
300₽ |
|
|
14576 |

ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.9 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.9 |
Теоретическая механика 2 |
300₽ |
|
|
14578 |

ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.10 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.10 |
Теоретическая механика 2 |
300₽ |
|
|
14580 |

ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.11 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.11 |
Теоретическая механика 2 |
300₽ |
|
|
14582 |
ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.12 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.12 |
Теоретическая механика 2 |
300₽ |
|
|
14584 |

ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.13 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.13 |
Теоретическая механика 2 |
300₽ |
|
|
14586 |

ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.14 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.14 |
Теоретическая механика 2 |
300₽ |
|
|
14588 |
ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.15 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.15 |
Теоретическая механика 2 |
300₽ |
|
|
14590 |
ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.16 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.16 |
Теоретическая механика 2 |
300₽ |
|
|
14592 |
ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.17 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.17 |
Теоретическая механика 2 |
300₽ |
|
|
14594 |

ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.18 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.18 |
Теоретическая механика 2 |
300₽ |
|
|
14596 |

ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.19 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.19 |
Теоретическая механика 2 |
300₽ |
|
|
14598 |
ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.20 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.20 |
Теоретическая механика 2 |
300₽ |
|
|
14600 |
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
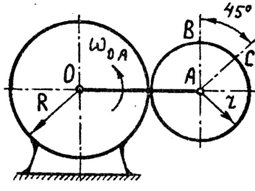
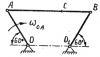
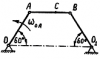
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис.
OA = 30 см = 0,30 м; AB = 60 см = 0,60 м; AC = 40 см = 0,40 м; ωOA = 2 c-1.
|
Теоретическая механика |
K6.4 |
Теоретическая механика 2 |
300₽ |
|
|
14604 |

ПЛОСКО-ПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
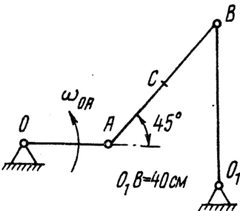
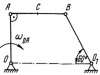
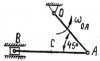
Для заданного положения механизма найти скорости точек В и С, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис. К6.1-К6.20.
OA = 30 см; AB = 60 см; AC = 30 см; ωOA = 6 с-1
|
Теоретическая механика |
K6.11 |
Теоретическая механика 2 |
300₽ |
|
|
14606 |
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис. K6.5.
OA = 0,35 м; AB = 0,15 м; AC = 0,15 м; r = 0,15 м; ωOA = 3 c-1.
|
Теоретическая механика |
K6.5 |
Теоретическая механика 2 |
300₽ |
|
|
14608 |
ПЛОСКО-ПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
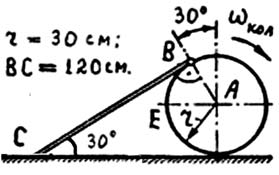
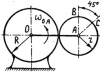
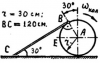
Для заданного положения механизма найти скорости точек В и С, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис. К6.1-К6.20.
AB = 60 см; ωкол = 3 c-1; BC = 120 см; r = 30 см.
|
Теоретическая механика |
K6.12 |
Теоретическая механика 2 |
300₽ |
|
|
14610 |
ПЛОСКО-ПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
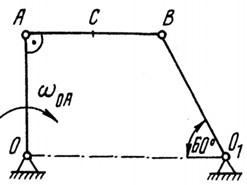
Для заданного положения механизма найти скорости точек В и С, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис. К6.1-К6.20
ОА = 30 см, АВ = 40 см, АС = 20 см, ωОА = 2 с-1
|
Теоретическая механика |
K6.16 |
Теоретическая механика 2 |
300₽ |
|
|
14612 |
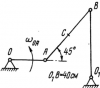
ПЛОСКО-ПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
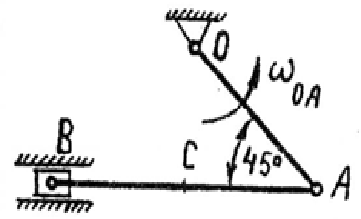
Для заданного положения механизма найти скорости точек В и С, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис. К6.1-К6.20
OA = 30 см = 0,30 м; AB = 50 см = 0,50 м; AC = 25 см = 0,25 м; ωOA = 3 c-1.
|
Теоретическая механика |
K6.7 |
Теоретическая механика 2 |
300₽ |
|
|
14614 |
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис.
OA = 25 см = 0,25 м; AB = 45 см = 0,45 м; AC = 22,5 см = 0,225 м; ωOA = 3 c-1; OB1 = 40 см.
|
Теоретическая механика |
K6.20 |
Теоретическая механика 2 |
300₽ |
|
|
14616 |
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис.
OA = 30 см = 0,30 м; AB = 30 см = 0,30 м; AC = 20 см = 0,20 м; ωOA = 4 c-1.
|
Теоретическая механика |
K6.2 |
Теоретическая механика 2 |
300₽ |
|
|
14620 |

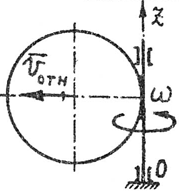
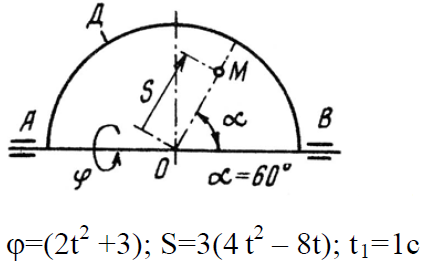
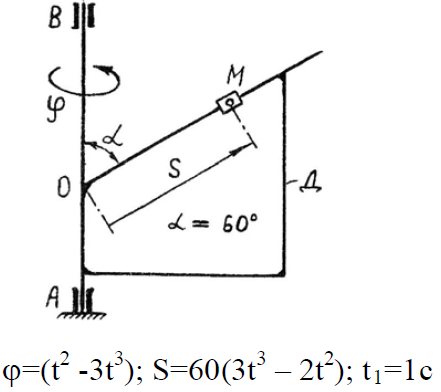
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По диаметру диска, вращающегося вокруг вертикальной оси 0Z с угловой скоростью ω = 3t2 с-1, движется точка М пo закону Sотн = 0,6t2 м с-2. Определить абсолютную скорость точки М в момент времени t = 1 с.
|
Теоретическая механика |
K7.16 |
Теоретическая механика 2 |
300₽ |
|
|
14622 |

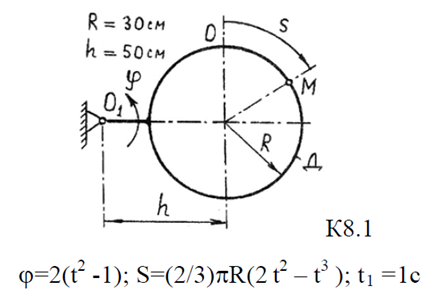
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
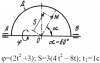
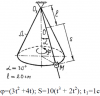
По заданным уравнениям относительного движения точки М и переносного движения тела Д определить для момента времени t = t1, абсолютную скорость и абсолютное ускорение точки М. Схемы механизмов и необходимые для расчета данные представлены на рис. К8.1 – К8.20.
|
Теоретическая механика |
K8.1 |
Теоретическая механика 2 |
500₽ |
|
|
14624 |

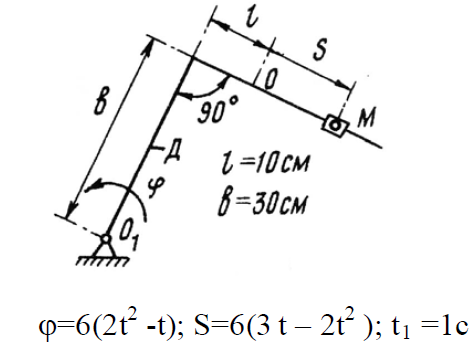
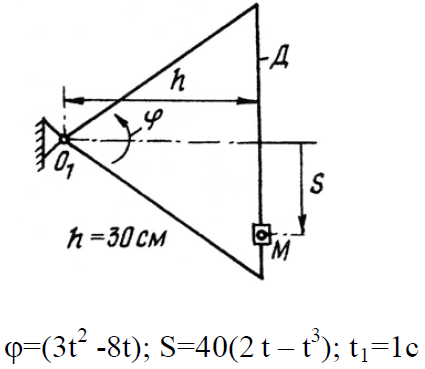
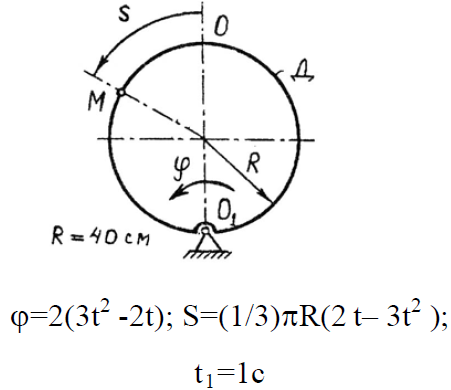
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По заданным уравнениям относительного движения точки М и переносного движения тела Д определить для момента времени t = t1, абсолютную скорость и абсолютное ускорение точки М. Схемы механизмов и необходимые для расчета данные представлены на рис. К8.1 – К8.20.
|
Теоретическая механика |
K8.2 |
Теоретическая механика 2 |
500₽ |
|
|
14626 |

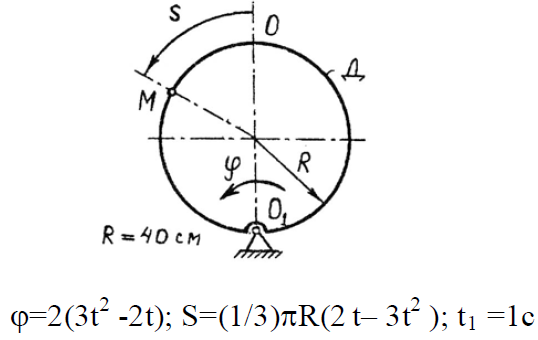
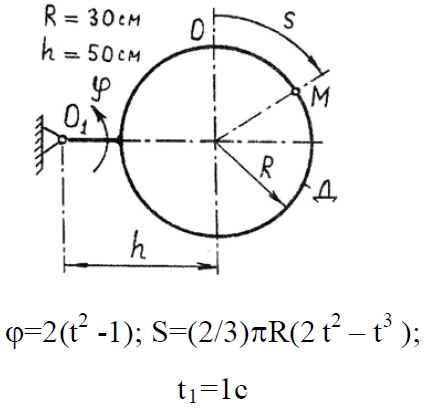
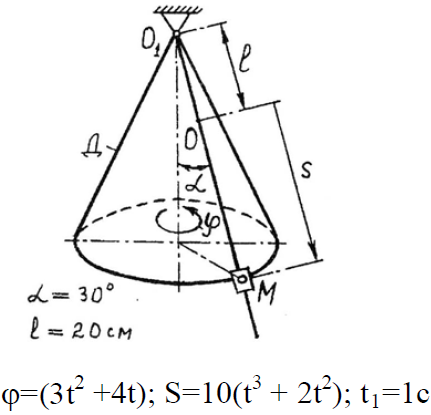
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По заданным уравнениям относительного движения точки М и переносного движения тела Д определить для момента времени t = t1, абсолютную скорость и абсолютное ускорение точки М. Схемы механизмов и необходимые для расчета данные представлены на рис. К8.1 – К8.20.
|
Теоретическая механика |
K8.3 |
Теоретическая механика 2 |
500₽ |
|
|
14628 |
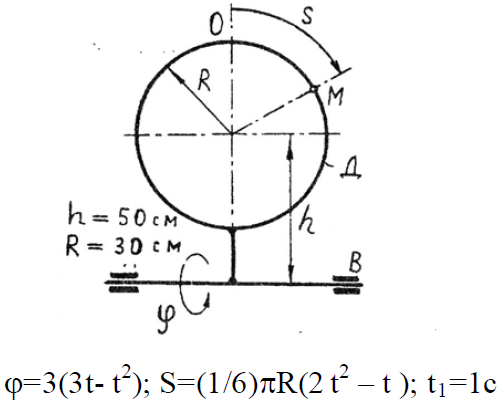
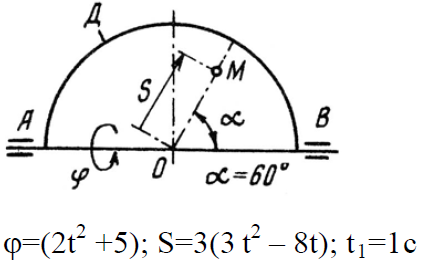
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По заданным уравнениям относительного движения точки М и переносного движения тела Д определить для момента времени t = t1, абсолютную скорость и абсолютное ускорение точки М. Схемы механизмов и необходимые для расчета данные представлены на рис. К8.1 – К8.20.
|
Теоретическая механика |
K8.4 |
Теоретическая механика 2 |
500₽ |
|
|
14630 |

СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По заданным уравнениям относительного движения точки М и переносного движения тела Д определить для момента времени t = t1, абсолютную скорость и абсолютное ускорение точки М. Схемы механизмов и необходимые для расчета данные представлены на рис. К8.1 – К8.20.
|
Теоретическая механика |
K8.5 |
Теоретическая механика 2 |
500₽ |
|
|
14632 |

СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По заданным уравнениям относительного движения точки М и переносного движения тела Д определить для момента времени t = t1, абсолютную скорость и абсолютное ускорение точки М. Схемы механизмов и необходимые для расчета данные представлены на рис. К8.1 – К8.20.
|
Теоретическая механика |
K8.6 |
Теоретическая механика 2 |
500₽ |
|
|
14634 |

СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По заданным уравнениям относительного движения точки М и переносного движения тела Д определить для момента времени t = t1, абсолютную скорость и абсолютное ускорение точки М. Схемы механизмов и необходимые для расчета данные представлены на рис. К8.1 – К8.20.
|
Теоретическая механика |
K8.7 |
Теоретическая механика 2 |
500₽ |
|
|
14636 |

СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По заданным уравнениям относительного движения точки М и переносного движения тела Д определить для момента времени t = t1, абсолютную скорость и абсолютное ускорение точки М. Схемы механизмов и необходимые для расчета данные представлены на рис. К8.1 – К8.20.
|
Теоретическая механика |
K8.8 |
Теоретическая механика 2 |
500₽ |
|
|
14638 |

СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По заданным уравнениям относительного движения точки М и переносного движения тела Д определить для момента времени t = t1, абсолютную скорость и абсолютное ускорение точки М. Схемы механизмов и необходимые для расчета данные представлены на рис. К8.1 – К8.20.
|
Теоретическая механика |
K8.9 |
Теоретическая механика 2 |
500₽ |
|
|
14640 |

СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По заданным уравнениям относительного движения точки М и переносного движения тела Д определить для момента времени t = t1, абсолютную скорость и абсолютное ускорение точки М. Схемы механизмов и необходимые для расчета данные представлены на рис. К8.1 – К8.20.
|
Теоретическая механика |
K8.10 |
Теоретическая механика 2 |
500₽ |
|
|
14642 |

СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По заданным уравнениям относительного движения точки М и переносного движения тела Д определить для момента времени t = t1, абсолютную скорость и абсолютное ускорение точки М. Схемы механизмов и необходимые для расчета данные представлены на рис. К8.1 – К8.20.
|
Теоретическая механика |
K8.11 |
Теоретическая механика 2 |
500₽ |
|
|
14644 |
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По заданным уравнениям относительного движения точки М и переносного движения тела Д определить для момента времени t = t1, абсолютную скорость и абсолютное ускорение точки М. Схемы механизмов и необходимые для расчета данные представлены на рис. К8.1 – К8.20.
|
Теоретическая механика |
K8.12 |
Теоретическая механика 2 |
500₽ |
|
|
14646 |

СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По заданным уравнениям относительного движения точки М и переносного движения тела Д определить для момента времени t = t1, абсолютную скорость и абсолютное ускорение точки М. Схемы механизмов и необходимые для расчета данные представлены на рис. К8.1 – К8.20.
|
Теоретическая механика |
K8.13 |
Теоретическая механика 2 |
500₽ |
|