Если найти нужную задачу не удаётся, Вы можете оформить Заказ.
Как использовать поиск
| Номер | Условие задачи | Предмет | Задачник |
Цена |
||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 11730 |
Найти все экстремали функционала $J(y)$: $$J[y]=\int_{0}^{1}({y'}^2-y^2-y)e^{2x}dx,$$ удовлетворяющие граничным условиям $y(0)=0;\ y(1)=1/e$. |
Вариационное исчисление | 2.23 | Вариационное исчисление | 150₽ | |||||||||||||||||||
| 9730 |
Две равномерно заряженные концентрические сферы с радиусами R1 и R2 имеют заряды соответственно q1 и q2.
Определить напряженность и потенциал, создаваемые заряженными сферами в точках а, b, и с, находящимися на расстоянии соответственно r1, r2 и r3 от центра сфер. |
Электростатика | 150₽ | |||||||||||||||||||||
| 13530 |
Один моль идеального газа переходит из начального состояния 1 в конечное состояние 3 в результате двух процессов 1-2 и 2-3. Значения давления и объема газа в состояниях 1 и 3 равны соответственно P1, V1 и P3, V3. Найти работу, совершенную газом, количество теплоты Q, полученное газом и приращение внутренней энергии газа ΔU в процессе перехода из начального состояния 1 в конечное состояние 3.
|
ФИЗИКА | 5-1-4 | ТГУ. Практические занятия по физике. 2019 год | 150₽ | |||||||||||||||||||
| 17869 |
Вычислить интеграл $$\oint\limits_{\frac{x^2}{3}+\frac{y^2}{9}=1} \frac{z\ \sin{z} dz}{(z-1)^5 }$$ |
Теория функций комплексного переменного | 150₽ | |||||||||||||||||||||
| 9174 |
Найти экстремали функционалов: с дифференциальными связями: |
Вариационное исчисление | 4.12 | Вариационное исчисление | 150₽ | |||||||||||||||||||
| 17275 |
Построить интерполяционный полином Лагранжа и интерполяционный полином Ньютона для функции, заданной таблично:
Найти приближенные значения функции и производной в точке x = 6. |
Численные методы | 150₽ | |||||||||||||||||||||
| 10460 |
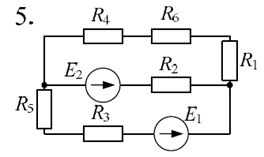
|
Электротехника | 235 | МИИТ. Общая электротехника и электроника. 2016 год | 150₽ | |||||||||||||||||||
| 10540 |
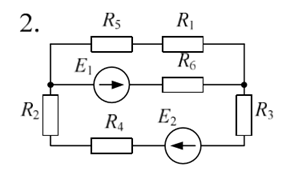
|
Электротехника | 229 | МИИТ. Общая электротехника и электроника. 2016 год | 150₽ | |||||||||||||||||||
| 12906 |
Диск массой m, имеющий радиус R, начинает вращаться под действием силы F, приложенной по касательной к образующей диска, перпендикулярно ею радиусу; при этом момент сил трения, действующий на диск, равен М1. За время t, отсчитанное oт начала движения, диск совершает N оборотов. Определить параметр, обозначенный в таблице данных для Вашего варианта знаком «?».
|
Механика | 5-6 | ЗабГУ. Физика. 2011 год | 150₽ | |||||||||||||||||||
| 10314 |
|
Электротехника | 232 | МИИТ. Общая электротехника и электроника. 2016 год | 150₽ | |||||||||||||||||||
| 14274 |
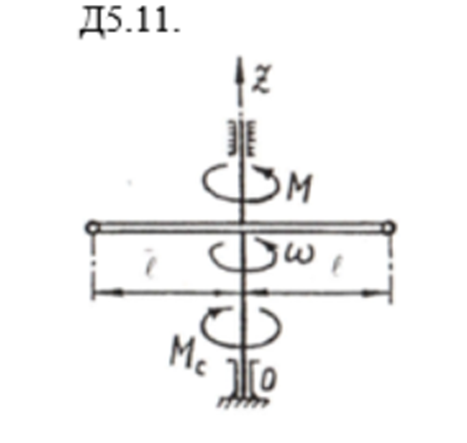
|
Теоретическая механика | Д5.11 | Теоретическая механика 2 | 150₽ | |||||||||||||||||||
| 4328 |
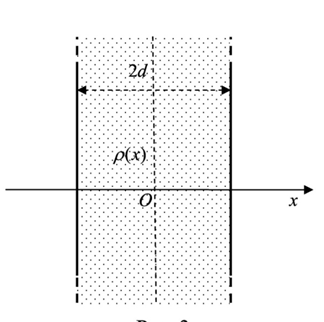
Две плоскопараллельные тонкие пластины заряжены, поверхностные плотности электрических зарядов на них равны соответственно σ1 и σ2 В поле, образованное этими пластинами, внесли слой диэлектрика с относительной диэлектрической проницаемостью ε толщиной d1 и слой металла толщиной d2. Расстояние между пластинами равно d = d1 + d2. Найти напряженность и потенциал электростатического поля:
|
Электростатика | 150₽ | |||||||||||||||||||||
| 13546 |
Один моль идеального газа переходит из начального состояния 1 в конечное состояние 3 в результате двух процессов 1-2 и 2-3. Значения давления и объема газа в состояниях 1 и 3 равны соответственно P1, V1 и P3, V3. Найти работу, совершенную газом, количество теплоты Q, полученное газом и приращение внутренней энергии газа ΔU в процессе перехода из начального состояния 1 в конечное состояние 3.
|
ФИЗИКА | 5-1-12 | ТГУ. Практические занятия по физике. 2019 год | 150₽ | |||||||||||||||||||
| 17877 |
Вычислить интеграл $$\oint\limits_{ |z|=1} \frac{e^z}{z^2(z^2-9)} dz $$ |
Теория функций комплексного переменного | 150₽ | |||||||||||||||||||||
| 4368 |
Теплоизолированный сосуд разделен теплопроводной неподвижной перегородкой на две части: объем первой части сосуда в 2 раза больше объема второй части сосуда. В первой части сосуда находится гелий количеством вещества 2 моль, а во втором – аргон количеством вещества 2 моль? Определите отношение давления гелия к давлению аргона после установки теплового равновесия. |
Молекулярная физика и термодинамика | 150₽ | |||||||||||||||||||||
| 10476 |
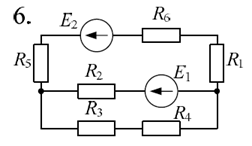
|
Электротехника | 216 | МИИТ. Общая электротехника и электроника. 2016 год | 150₽ | |||||||||||||||||||
| 12922 |
Диск массой m, имеющий радиус R, начинает вращаться под действием силы F, приложенной по касательной к образующей диска, перпендикулярно ею радиусу; при этом момент сил трения, действующий на диск, равен М1. За время t, отсчитанное oт начала движения, диск совершает N оборотов. Определить параметр, обозначенный в таблице данных для Вашего варианта знаком «?».
|
Механика | 5-14 | ЗабГУ. Физика. 2011 год | 150₽ | |||||||||||||||||||
| 16693 |
Между двумя скрещенными поляроидами помещена пластинка в полволны. Оптическая ось пластинки параллельна оси одного из поляроидов, на систему падает пучок естественного света интенсивностью, равной Iест (в единицах СИ). Чему равна интенсивность света, прошедшего через систему? |
Оптика | 150₽ | |||||||||||||||||||||
| 16210 |
|
Электродинамика | 150₽ | |||||||||||||||||||||
| 13170 |
Средняя плотность планеты равна ρ, ее радиус – R, период обращения планеты вокруг своей оси – T. Найти вес тела массой m на экваторе планеты.
|
ФИЗИКА | 2-2-6 | ТГУ. Практические занятия по физике. 2019 год | 150₽ | |||||||||||||||||||
| 13562 |
Один моль идеального газа переходит из начального состояния 1 в конечное состояние 3 в результате двух процессов 1-2 и 2-3. Значения давления и объема газа в состояниях 1 и 3 равны соответственно P1, V1 и P3, V3. Найти работу, совершенную газом, количество теплоты Q, полученное газом и приращение внутренней энергии газа ΔU в процессе перехода из начального состояния 1 в конечное состояние 3.
|
ФИЗИКА | 5-1-20 | ТГУ. Практические занятия по физике. 2019 год | 150₽ | |||||||||||||||||||
| 17885 |
Вычислить интеграл $$\oint\limits_{|z-1|=2} \frac{1}{(z^2+1)(z^2-4) }dz$$ |
Теория функций комплексного переменного | 150₽ | |||||||||||||||||||||
| 16378 |
Мальчик съезжает на санках без начальной скорости с горки высотой H = 5 м по кратчайшему пути и приобретает у подножья горки скорость v = 6 м/с. Какую минимальную работу необходимо затратить, чтобы втащить санки массой m = 7 кг на горку от её подножья, прикладывая силу вдоль поверхности горки? |
Механика | 150₽ | |||||||||||||||||||||
| 10492 |
|
Электротехника | 296 | МИИТ. Общая электротехника и электроника. 2016 год | 150₽ | |||||||||||||||||||
| 16660 |
Материальная точка массой m = 2 кг движется в однородном силовом поле $\vec{F}$, $F$ = 0,5 Н. В момент времени t = 0 её скорость по величине равна v0 = 1 м/с и составляет угол α = 120° с направлением силы $\vec{F}$. Через какое время τ импульс материальной точки будет равен по модулю начальному? |
Механика | 150₽ | |||||||||||||||||||||
| 11698 |
Найти все экстремали функционала $J(y)$, удовлетворяющие указанным граничным условиям: $$J[y]=\int_1^5\frac{\sqrt{1+{y'}^2}}{y}dx; y(1)=3,\ y(5)=5$$ |
Вариационное исчисление | 2.10 | Вариационное исчисление | 150₽ | |||||||||||||||||||
| 10572 |
|
Электротехника | 280 | МИИТ. Общая электротехника и электроника. 2016 год | 150₽ | |||||||||||||||||||
| 12938 |
Диск массой m, имеющий радиус R, начинает вращаться под действием силы F, приложенной по касательной к образующей диска, перпендикулярно ею радиусу; при этом момент сил трения, действующий на диск, равен М1. За время t, отсчитанное oт начала движения, диск совершает N оборотов. Определить параметр, обозначенный в таблице данных для Вашего варианта знаком «?».
|
Механика | 5-22 | ЗабГУ. Физика. 2011 год | 150₽ | |||||||||||||||||||
| 16702 |
В таблице 10x10 половина клеток красные, половина – синие. Назовём строку и столбец чистыми, если в них все клетки одного цвета. Какое наибольшее суммарное число чистых строк и столбцов может быть в такой таблице и почему? |
МАТЕМАТИКА | 150₽ | |||||||||||||||||||||
| 8982 |
Водяной пар, имея начальные параметры p1 и x1, нагревается при постоянном давлении до температуры t2, затем дросселируется до давления p3.
|
Теплотехника | 150₽ | |||||||||||||||||||||
| 13186 |
Средняя плотность планеты равна ρ, ее радиус – R, период обращения планеты вокруг своей оси – T. Найти вес тела массой m на экваторе планеты.
|
ФИЗИКА | 2-2-14 | ТГУ. Практические занятия по физике. 2019 год | 150₽ | |||||||||||||||||||
| 9222 |
Найти экстремали функционалов в изопериметрической задаче: $$J[y]=\int_0^1{y'}^2dx;\ y(0)=2,\ y(1)=2e+1,\ \int_0^1ye^{x-1}dx=e$$ |
Вариационное исчисление | 4.19 | Вариационное исчисление | 150₽ | |||||||||||||||||||
| 6771 |
Найти функции, на которых может достигаться экстремум функционала в изопериметрической задаче $$V[y]=\int_0^{\pi}y\sin xdx; y(0)=0, y(\pi)=\pi, \int_{0}^{\pi} {y'}^2 dx=3/2\pi$$ |
Вариационное исчисление | 150₽ | |||||||||||||||||||||
| 10508 |
|
Электротехника | 267 | МИИТ. Общая электротехника и электроника. 2016 год | 150₽ | |||||||||||||||||||
| 11714 |
Найти все экстремали функционала $J(y)$: $$J[y]=\int_0^1\frac{{y'}^2}{1+y^2}dx,$$ удовлетворяющие граничным условиям $y(0)=0;\ y(1)=\frac 34$ |
Вариационное исчисление | 2.28 | Вариационное исчисление | 150₽ | |||||||||||||||||||
| 16078 |
Частица, получившая запас кинетической энергии после прохождения разности потенциалов ∆φ, влетает в однородное магнитное поле со скоростью v, составляющей угол α с линиями вектора индукции магнитного поля В, после чего двигается по спирали радиусом R и шагом h. Определить параметры, обозначенные в таблице для Вашего варианта знаком «?».
|
Электродинамика | 2-5-5 | ЗабГУ. Физика. 2011 год | 150₽ | |||||||||||||||||||
| 11796 |
Найти экстремаль функционалов со старшей производной $$J[y]=\int_0^1({y'''}^2+{y''}^2)dx,$$ удовлетворяющую граничным условиям $y(0)=0,\ y'(0)=1,\ y''(0)=0,\ y(1)=\sinh{1},\ y'(1)=\cosh{1},\ y''(1)=\sinh{1}$ |
Вариационное исчисление | 4.5 | Вариационное исчисление | 150₽ | |||||||||||||||||||
| 16160 |
Дифференциальная функция распределения случайной величины имеет вид f(x) = Ag(x). Найти параметр А, М(Х), D(Х), σ(Х), М0, Мe. Построить графики f(x) и F(x), рассматривая не менее пяти точек на интервале. Найти вероятность того, что отклонение от математического ожидания не более трех среднеквадратических отклонений. $$g(x)=\frac{1}{x^4},\ х\ge 2$$ |
Теория вероятностей | 150₽ | |||||||||||||||||||||
| 15032 |
На предприятии производят два вида изделия А и В, причем для производства 1 тонны изделия А необходимо 1 человеку работать в течение 22 часов, изделия В - 14 часов. Максимальная производительность оборудования в неделю составляет 12 и 18 тонн соответственно. Изделие А приносит прибыль 320 рублей за тонну, изделие В - 245. На предприятии работает 10 человек, в течение 40 часов в неделю каждый. |
Линейное программирование | 150₽ | |||||||||||||||||||||
| 4352 |
|
Электростатика | 150₽ | |||||||||||||||||||||
| 10444 |
|
Электротехника | 254 | МИИТ. Общая электротехника и электроника. 2016 год | 150₽ | |||||||||||||||||||
| 10524 |
|
Электротехника | 248 | МИИТ. Общая электротехника и электроника. 2016 год | 150₽ | |||||||||||||||||||
| 13994 |
|
Теоретическая механика | Д7.12 | Теоретическая механика 2 | 200₽ | |||||||||||||||||||
| 16834 |
Цикл Карно совершается одним киломолем азота. Температура нагревателя 400° С, холодильника 300° С. Известно также, что отношения максимального объема к минимальному за цикл равно 10. Определить КПД цикла, количество теплоты, полученной от нагревателя и отданной холодильнику, а также работу за один цикл машины. Постройте график цикла Карно. Недостающие и непротиворечивые данные возьмите из условия задачи 10.1. |
Молекулярная физика и термодинамика | 200₽ | |||||||||||||||||||||
| 16416 |
|
Электростатика | 4-3-7 | ТГУ. Физика | 200₽ | |||||||||||||||||||
| 13454 |
Один моль идеального газа переходит из начального состояния 1 в конечное состояние 3 в результате двух изопроцессов 1-2 и 2-3. Значения давления и объема газа в состояниях 1 и 3 равны соответственно p1, V1 и p3, V3. Найти давление, объем и температуру газа p2, V2, T2 в промежуточном состоянии 2. Изобразить процессы в координатах p-V, p-T и V-T.
|
ФИЗИКА | 4-2-6 | ТГУ. Практические занятия по физике. 2019 год | 200₽ | |||||||||||||||||||
| 12742 |
Материальная точка движется по окружности радиуса R так, что зависимость угла поворота φ от времени $\varphi =a+bt+ct^2$. Определить для момента времени t1 c линейную и угловую скорости точки; нормальное, тангенциальное и полное ускорения точки, а для промежутка времени t1 c до t2 c перемещение точки и пройденный путь.
|
Механика | 2-1 | ЗабГУ. Физика. 2011 год | 200₽ | |||||||||||||||||||
| 11906 |
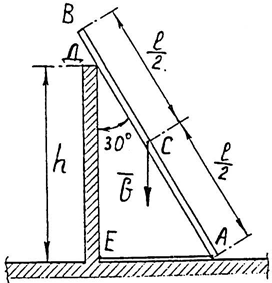
Верхний конец металлического стержня длиной L = 1 м закреплен шарнирно в точке O, а нижний конец скользит по проводнику, изогнутому по дуге. Радиус дуги равен длине стержня. Стержень совершает гармонические колебания с периодом T = 1 с, максимальный угол отклонения α = 30°. Определить максимальную разность потенциалов между концами стержня, если перпендикулярно плоскости колебаний имеется однородное магнитное поле с индукцией B = 0,1 Тл. |
Электромагнетизм | 200₽ | |||||||||||||||||||||
| 14746 |
|
Теоретическая механика | Д9.2 | Теоретическая механика 2 | 200₽ | |||||||||||||||||||
| 8762 |
|
Электромагнетизм | 200₽ |