|
10990 |
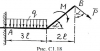
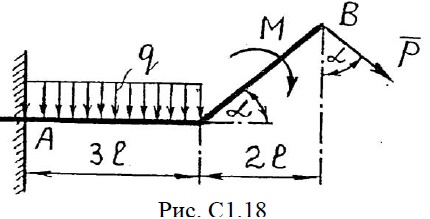
СОСТАВЛЕНИЕ РАСЧЕТНОЙ СХЕМЫ ПЛОСКОЙ КОНСТРУКЦИИ
Используя принцип освобождаемости от связей, освободить плоскую конструкцию от связей и приложить к ней реакции связей. Равномерно-распределенную нагрузку заменить соответствующей равнодействующей силой. Силы, не параллельные осям координат, разложить на составляющие, параллельные осям координат. Построить расчетную схему конструкции. Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. C1.18, исходные данные приведены в табл. 1.
| Номер варианта |
Р, кН |
G, кН |
M, кН∙м |
q, кН∙м |
l, м |
α, град |
| C1.18 |
8 |
- |
3 |
2 |
1 |
45° |
|
Теоретическая механика |
C1.18 |
Теоретическая механика 2 |
300₽ |
|
|
11070 |
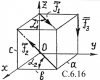
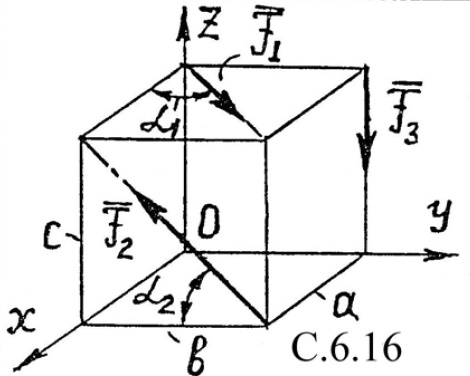
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C6.16 |
Теоретическая механика 2 |
300₽ |
|
|
9932 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
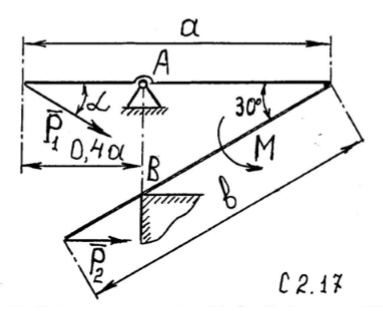
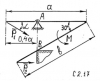
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.15 -исходные данные приведены в таблице 2.
| Номер варианта |
P1, кН |
P2, кН |
P3, кН |
M, кНм |
a, м |
b, м |
α, град |
| C2.17 |
9 |
5 |
0 |
6 |
1.6 |
1.6 |
30° |
|
Теоретическая механика |
C2.17_3 |
Теоретическая механика |
300₽ |
|
|
12306 |
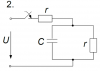
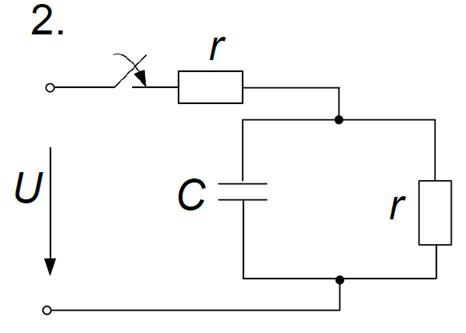
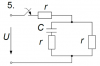
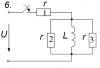
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 0 |
50 |
- |
150 |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
102 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
6497 |

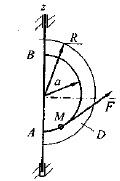
ПРИМЕНЕНИЕ УРАВНЕНИЙ ЛАГРАНЖА ВТОРОГО РОДА К ИЗУЧЕНИЮ ДВИЖЕНИЯ МЕХАНИЧЕСКОЙ СИСТЕМЫ С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ
Тело D массой m1 = 50 кг вращается вокруг вертикальной оси O1z под действием пары сил с моментом Mz = -14t2. Варианты расчетных схем изображены на рис. 7.1. При этом по желобу АВ тела D под действием внутренней силы F = (t3 + 4)2, направленной по касательной к желобу (управляющее воздействие), движется материальная точка М массой m2 = 12 кг. Согласно закону равенства действия и противодействия с такой же по величине силой, но направленной в противоположную сторону, точка М действует на тело D.Используя уравнения Лагранжа второго рода составить дифференциальные уравнения движения механической системы в обобщенных координатах. Сопротивлением движению пренебречь.
Тело D рассматривать как тонкую однородную пластину. Форма пластины выбирается в соответствии с вариантом задачи.
| Номер варианта |
m1, кг |
m2, кг |
a, м |
b, м |
R, м |
α, град |
Mz = Mz(t), Н∙м |
F = F(t), Н |
| 20 |
50 |
12 |
1 |
- |
1,2 |
- |
-14t2 |
(t3 + 4)2 |
|
Теоретическая механика |
|
|
300₽ |
|
|
11150 |
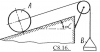
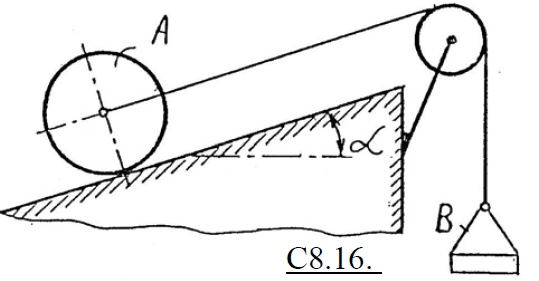
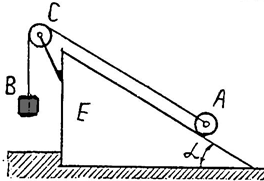
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
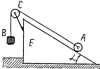
Расчетные схемы даны на рис. С8.16. Каток A радиуса r и весом P лежит на наклонной плоскости с утлом α. Определить наименьший вес Qmin груза B, при котором возможно равновесие, если коэффициент трения качения катка равен δ.
|
Теоретическая механика |
C8.16 |
Теоретическая механика 2 |
300₽ |
|
|
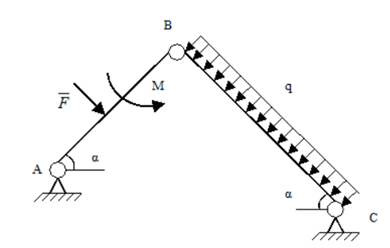
14330 |

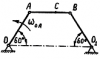
Две балки АВ и ВС (рис. 1) в вертикальной плоскости весом P1 = 11 (кН) и Р2 = 18 (кН) соответственно скреплены шарнирами A, B и C под углом α = 9° к горизонту. Найти реакции, возникающие в шарнирах A, B и C, если на конструкцию действует пара сил с моментом М = 10 (кН∙м); сосредоточенная сила F = 5 (кН), приложенная перпендикулярно балке |AB| = 8 (м), |BC| = 2 (м) в ее середине; распределенная нагрузка с интенсивностью q = 7 (кН/м) вдоль балки AB сверху или снизу вдоль балки BC сверху, или снизу.
|
Теоретическая механика |
Д7,25 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
12388 |
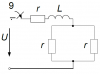
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 2 |
25 |
- |
120 |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
125 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
11230 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.16 |
3t2 + 4t |
-2t |
1 |
|
Теоретическая механика |
K1.16 |
Теоретическая механика 2 |
300₽ |
|
|
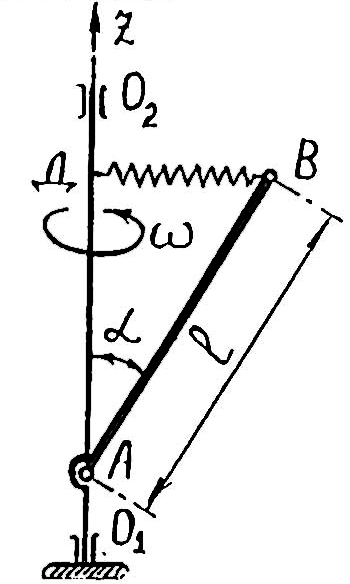
8364 |

Тонкий однородный стержень АВ массой m, длиной l, закрепленный на оси O1O2 в точке A, вращается вокруг этой оси с постоянной угловой скоростью ω, образуя с ней угол α. Определить усилие в пружине ВД.
|
Теоретическая механика |
Д6.14 |
Теоретическая механика 2 |
300₽ |
|
|
12468 |
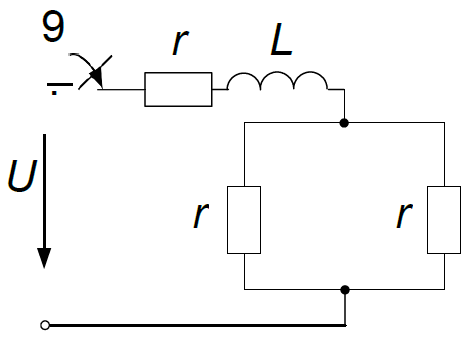
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 7 |
30 |
150 |
- |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
179 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
14810 |
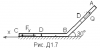
Груз D массой m, получив в точке A начальную скорость v0, движется в изогнутой трубе АВС, расположенной в вертикальной плоскости; участки трубы или оба наклонные, или один горизонтальный, а другой наклонный (рис.3.1, табл. 3.2).
На участке АВ на груз кроме силы тяжести действуют постоянная сила Q (ее направление показано на рисунках).
В точке B груз, не изменяя своей скорости, переходит на участок BC трубы, где на него кроме силы тяжести действует переменная сила F, проекция которой Fx на ось х задана в таблице.
Считая груз материальной точкой и зная время t1 движения груза от точки A до точки B, найти скорость груза на участке BC через t2 = 2 сек. после выхода из точки B. Трением груза о трубу пренебречь.
| Вариант |
m, кг |
v0, м/c |
Q, Н |
t1, с |
Fx, Н |
| 7 |
1,6 |
18 |
4 |
2 |
3t |
|
Теоретическая механика |
Д1-7 |
Методичка по термеху. Нижний Новгород. 2019 год |
300₽ |
|
|
8454 |
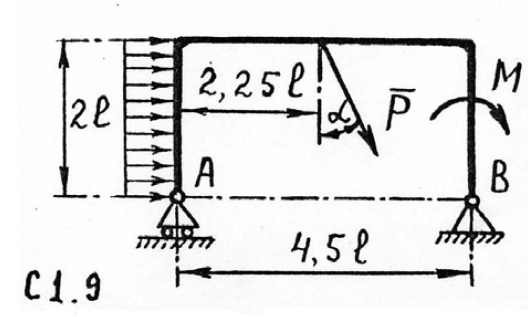
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. C1.9, исходные данные приведены в табл. 1.
| Номер варианта |
P, кН |
G, кН |
M, кНм |
q, кН/м |
l, м |
α, град |
| C1.9 |
20 |
- |
4 |
6 |
1 |
30° |
|
Теоретическая механика |
C1.9 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
5127 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 4.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.18 |
5∙t - 6∙t2 |
2t |
1 |
|
Теоретическая механика |
K1.18_1 |
Теоретическая механика |
300₽ |
|
|
8548 |
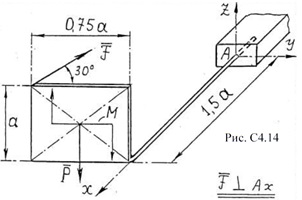
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунках С4.14.
|
Теоретическая механика |
C4.14_1 |
Теоретическая механика |
300₽ |
|
|
11086 |

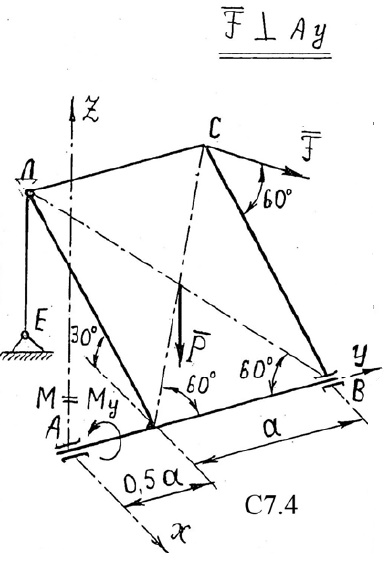
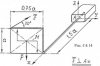
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунке.
|
Теоретическая механика |
C7.4 |
Теоретическая механика 2 |
300₽ |
|
|
12322 |
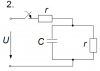
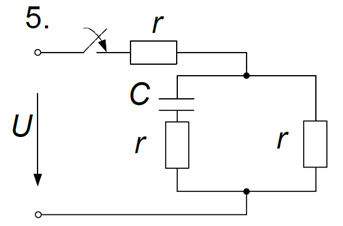
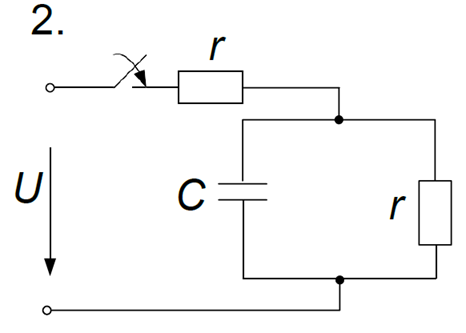
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 8 |
20 |
- |
35 |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
182 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
11166 |
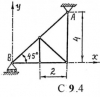
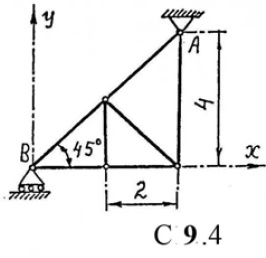
ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ОДНОРОДНОГО ТЕЛА
Найти положение центра тяжести плоской фермы, пластинки и объемного тела. Ферма состоит из однородных стержней; пластинка имеет малую постоянную толщину. Схемы тел показаны на рис. C9.4. Размеры ферм даны в метрах, остальных тел - в сантиметрах.
|
Теоретическая механика |
C9.4 |
Теоретическая механика 2 |
300₽ |
|
|
12404 |
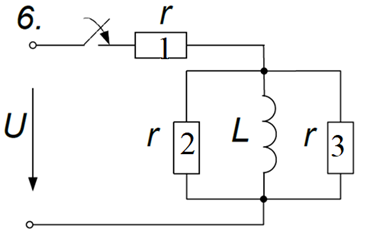
РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ ПРИ ПОСТОЯННОЙ ЭДС ИСТОЧНИКА
Цепь, изображенная на рис. 1, подключается к источнику постоянного напряжения U 100 В. Значения напряжения источника, сопротивлений резисторов, величины индуктивностей и емкостей приведены в табл. 1.
| Предпоследняя цифра учебного шрифта студента |
r, Ом |
L, мГн |
C, мкФ |
| 5 |
15 |
10 |
- |
Необходимо:
1. Определить начальные значения токов и напряжений (до и сразу после коммутации).
2. Определить принужденные значения токов и напряжений.
3. Определить постоянную времени цепи.
4. Построить графики изменения во времени токов в ветвях и напряжений на участках цепи на основе начальных и принужденных значений для моментов времени r, 2ττ
Примечание к заданию: определять значения и строить графики только токи в ветви с индуктивностью (если в схеме индуктивность) или только напряжения на емкости (если в схеме емкость).
|
Электротехника |
156 |
СамГУПС Саратов. Общая электротехника и электроника. 2018 год |
300₽ |
|
|
8382 |
ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Движение точки вращающегося тела задано уравнениями $x=10\cos{2t^2}$; $y=10\sin{2t^2}$ (x и y - в см,t - в с). Найти закон вращения, скорость и ускорение точки тела, отстоящей от оси вращения на расстоянии r = 6 см. Начальная угловая скорость тела ω0 = 0 с-1.
|
Теоретическая механика |
K4.2 |
Теоретическая механика 2 |
300₽ |
|
|
12484 |
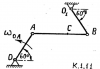
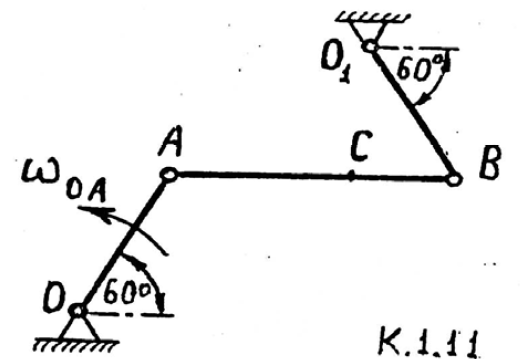
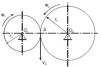
Для заданного механизма найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки.
OA = 25 см = 0,25 м; AB = 40 см = 0,40 м; AC = 25 см = 0,25 м; ωOA = 3 c-1.
|
Теоретическая механика |
K6.6 |
Теоретическая механика 2 |
300₽ |
|
|
4835 |
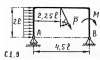
 Жесткая рама закреплена в точке A шарнирно, а в точке D прикреплена к невесомому стержню под углом α = 60°. На раму действует пара сил с моментом M = 80 кН∙м; сила F = 4 кН, приложенная в точке B под углом β=10°, распределенная нагрузка с интенсивностью q = 1 кН/м вдоль колена /BC/ = 2 м снизу, /ED/ = 4 м. Определить реакции в точках A и D. Жесткая рама закреплена в точке A шарнирно, а в точке D прикреплена к невесомому стержню под углом α = 60°. На раму действует пара сил с моментом M = 80 кН∙м; сила F = 4 кН, приложенная в точке B под углом β=10°, распределенная нагрузка с интенсивностью q = 1 кН/м вдоль колена /BC/ = 2 м снизу, /ED/ = 4 м. Определить реакции в точках A и D.
|
Теоретическая механика |
C1.8 |
Теоретическая механика |
300₽ |
|
|
16686 |
Натуральное число называется палиндромом, если оно читается слева направо и справа налево
одинаково (например, 2, 33 или 12321). Для каких натуральных n существует палиндром, делящийся
на n?
|
МАТЕМАТИКА |
|
|
300₽ |
|
|
8480 |
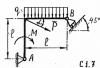
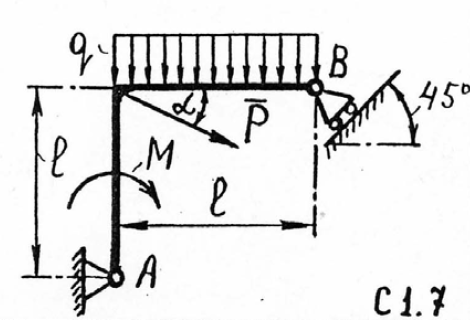
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. С1.7, исходные данные приведены в табл. 1.
| Номер варианта |
P, кН |
G, кН |
M, кНм |
q, кН/м |
l, м |
α, град |
| С1.7 |
12 |
6 |
8 |
3 |
1 |
30° |
|
Теоретическая механика |
C1.7 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
10942 |

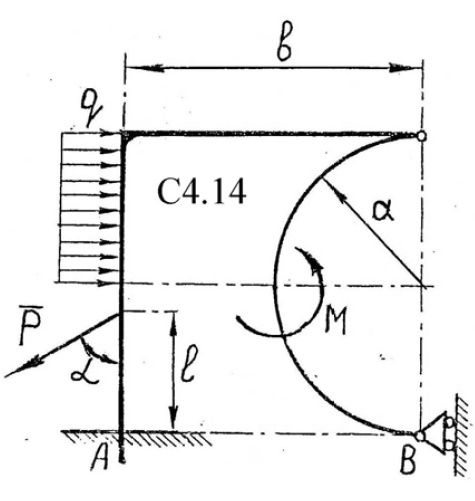
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. C4.14, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| C4.14 |
4 |
5.2 |
3 |
2.5 |
3.2 |
1.0 |
30° |
|
Теоретическая механика |
C4.14 |
Теоретическая механика 2 |
300₽ |
|
|
8564 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = x(t), у = y(t). найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 4.
| Номер варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| K1.4 |
3∙cos(πt/3) - 2 |
5∙sin(πt/3) |
4 |
|
Теоретическая механика |
K1.4_1 |
Теоретическая механика |
300₽ |
|
|
14598 |
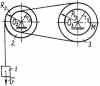
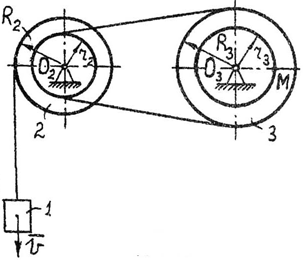
ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.20 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.20 |
Теоретическая механика 2 |
300₽ |
|
|
8572 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = x(t), у = y(t). найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 4.
| Номер варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| K1.16 |
3t2 + 4t |
-2t |
1 |
|
Теоретическая механика |
K1.16_1 |
Теоретическая механика |
300₽ |
|
|
16811 |
В тетраэдре ABCD медианы грани ABC пересекаются в точке M, точка O - середина отрезка DM. Через точку O проведены два сечения - первое параллельно AB и CD, второе параллельно AC и BD. Постройте линию пересечения этих сечений и определите, в каком отношении она делит площадь каждого из сечений.
|
Стереометрия |
|
|
300₽ |
|
|
10882 |
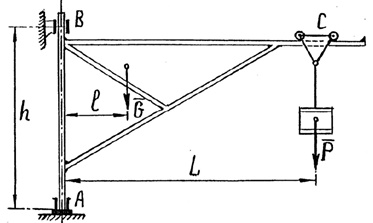
ОПРЕДЕЛЕНИЕ РЕАКЦИИ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Схемы конструкций построены на рис. СЗ. 1 - С3.20. Кран весом G имеет вертикальную ось вращения АВ. Расстояние АВ = h = 5 м, центр тяжести крана отстоит от оси АВ на расстоянии l = 2 м, тележка C несет груз весом P. Определить реакции подшипника B и подпятника A кpaнa. G = 12 кН; Р = 4кН; L = 6 м.
|
Теоретическая механика |
C3.4. |
Теоретическая механика 2 |
300₽ |
|
|
14036 |
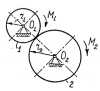
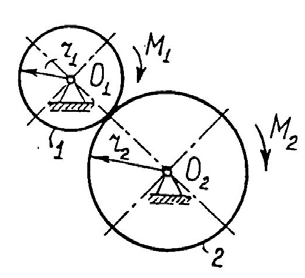
В передаче вращением колесо 1 приводится в движение моментом M1 к колесу 2 приложен момент сопротивления М2. Найти угловое ускорение первого колеса, считая колеса однородными дисками, массы которых —m1 и m2, а радиусы —r1 и r2.
|
Теоретическая механика |
Д7.1 |
Теоретическая механика 2 |
300₽ |
|
|
5103 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 4.
| № варианта |
х = х(t), cм |
y = у(t), см |
Время t1, с |
| К1.10 |
$3\sin\frac{\pi t}{2}$ |
$4\cos\frac{\pi t}{2}$ |
0,5 |
|
Теоретическая механика |
K1.10_1 |
Теоретическая механика |
300₽ |
|
|
13326 |
Шар массой m1, летящий со скоростью v1, сталкивается с неподвижным шаром массой m2. После удара шары разлетаются под углом α друг к другу. Удар абсолютно упругий, столкновение происходит в горизонтальной плоскости. Найти скорости шаров u1 и u2 после удара.
| № варианта |
m1, v1, m2, α |
| 3 |
m1 = 100 г, v1 = 20 м/с, m2 = 250 г, α = 120° |
|
ФИЗИКА |
3-3-3 |
ТГУ. Практические занятия по физике. 2019 год |
300₽ |
|
|
8124 |

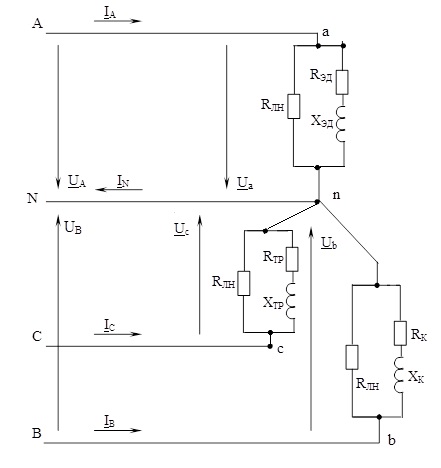
ЗАДАНИЕ № 2 «РАСЧЕТ ТРЁХФАЗНОЙ ЦЕПИ»
3.1. Внутри здания сети внутреннего электроснабжения выполнены по схеме "звезда" с нейтральным проводом. Отдельные помещения подключены к разным фазам трехфазного источника электроэнергии с линейным напряжением Uл = 380 В и частотой тока f = 50 Гц. На основании данных табл. 3.1 - 3.2 определить для своего варианта (последняя цифра трехзначного варианта из предыдущего задания – номер строки в табл. 3.2, предпоследняя цифра – номер строки в табл. 3.1) нагрузку каждой фазы, причем электропотребители в фазе включаются параллельно. Считая лампу накачивания (ЛН) активной нагрузкой, калорифер (К), электродвигатель (ЭД) и трансформатор (ТР) активно-индуктивной нагрузкой, начертить электрическую схему замещения рассчитываемой трехфазной цепи для своего варианта.
3.2. Выполнить анализ электрического состояния полученной в п. 3.1 схемы при наличии нейтрального провода:
1) определить активное, реактивное и полное сопротивления каждого электропотребителя;
2) рассчитать токи, протекающие через каждый электропотребитель (токи в параллельных ветвях каждой фазы);
3) определить для каждой фазы полное сопротивление, активную, реактивную и полную мощность, коэффициент мощности;
4) рассчитать линейные токи и ток в нейтральном проводе;
5) определить для всей трехфазной нагрузки активную PН, реактивную QH и полную SH мощности, коэффициент мощности cos φH и составить баланс мощностей;
6) построить в масштабе совмещенную векторную диаграмму напряжений и токов.
Таблица 3.1. Вид нагрузки в фазах
| Номер строки |
Электроприемники в фазах |
| Фаза A |
Фаза B |
Фаза C |
| 2 |
ЛН, ЭД |
ЛН, К |
ЛН, ТР |
Таблица 3.2. Параметры нагрузки
| Номер строки |
ЛН |
К |
ТР |
Эд |
| PЛН |
PК |
cos φК |
SТР |
cos φТР |
PЭД |
КПД |
cos φЭД |
| 9 |
100 |
400 |
1 |
1600 |
0,5 |
400 |
0,74 |
0,76 |
3.3. Примечания:
1. Для всех токов и напряжений определить действующее значение и начальную фазу.
2. На схеме замещения изображать активную нагрузку в виде резистора, активно-индуктивную нагрузку в виде последовательного соединения резистора и идеальной индуктивной катушки.
3. Баланс мощностей должен сойтись с погрешностью менее 1%.
|
Электротехника |
|
|
300₽ |
|
|
10644 |
КИНЕМАТИКА ТВЕРДОГО ТЕЛА
Определение скоростей н ускорений точек твердого тела при поступательном и вращательном движениях.
По заданному уравнению поступательного движения груза 1 определить угловую скорость ω3, угловое ускорение ε3 колеса 3, скорость VM, ускорение $\vec a_M$ точки М механизма в момент времени, когда путь, пройденный грузом, равен S. Схемы механизмов показаны на рис. 48 - 50. а необходимые для расчетов данные помещены в табл.11.
| Вариант |
Радиусы, см |
Уравнение движения груза 1 x = x(t) (x - в см, t - в с) |
S, м |
| R2 |
r2 |
R3 |
r3 |
| 2 |
80 |
- |
60 |
45 |
x(t) = 80t2 |
0,1 |
|
Теоретическая механика |
K3.21 |
Теоретическая механика 2 |
300₽ |
|
|
14616 |
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис.
OA = 30 см = 0,30 м; AB = 30 см = 0,30 м; AC = 20 см = 0,20 м; ωOA = 4 c-1.
|
Теоретическая механика |
K6.2 |
Теоретическая механика 2 |
300₽ |
|
|
8590 |
ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Маховик вращается вокруг неподвижной оси по закону φ = At3 + Bt2, где φ задан в радианах, а время t - в секундах; A и B – постоянные коэффициенты. В момент времени t1 = 3 с угловая скорость маховика и его угловое ускорение имели значения ω1 = 72 c-1 и ε = 42 c-2. Определить угловое ускорение маховика, а также скорость и ускорение его точки, отстоящей от оси вращения на 20 см в момент времени t2 = 4 c.
|
Теоретическая механика |
K4.13 |
Теоретическая механика 2 |
300₽ |
|
|
16582 |

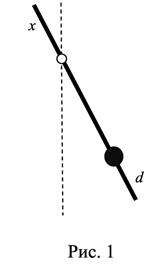
Физический маятник представляет собой тонкий однородный стержень длиной l = 1 м и массой m, на котором жестко закреплена материальная точка массой M на расстоянии d (d < l/2) от нижнего конца стержня. Точка подвеса маятника находится на расстоянии x (x < l/2) от верхнего конца стержня (рис. 1). Найти зависимость периода малых колебаний T маятника от расстояния x и построить график этой зависимости T(x) в интервале изменения x от 0 до l/2. Определить по графику минимальное значение периода T колебаний маятника. Ускорение свободного падения g = 9,81 м/c2.
| № варианта |
d, M/m |
| 6 |
d = 0,1 м, M/m = 0,5 |
|
Механика |
|
|
300₽ |
|
|
10898 |

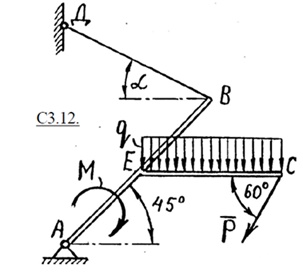
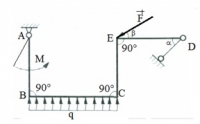
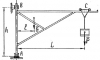
ОПРЕДЕЛЕНИЕ РЕАКЦИИ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Схемы конструкций построены на рис. СЗ. 1 - С3.20. Кронштейн ABC, нагруженный силой P, распределенной нагрузкой интенсивностью q и парой сил с моментом M, удерживается под углом 45° к горизонту тросом BD. Найти натяжение троса и реакцию шарнира А. P = 15 кН; q = 10 кH/м; M = 9 кН м; AE = EB = 2 м; EC = 3 м; α = 45°.
|
Теоретическая механика |
C3.12. |
Теоретическая механика 2 |
300₽ |
|
|
14148 |
ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ. ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
Груз 1 массой m1, опускаясь вниз по призме, приводит в движение посредством нити, переброшенной через невесомый блок, груз 2 массой m2. Определить давление призмы на вертикальный выступ пола
|
Теоретическая механика |
Д7.13 |
Теоретическая механика 2 |
300₽ |
|
|
13342 |
Шар массой m1, летящий со скоростью v1, сталкивается с неподвижным шаром массой m2. После удара шары разлетаются под углом α друг к другу. Удар абсолютно упругий, столкновение происходит в горизонтальной плоскости. Найти скорости шаров u1 и u2 после удара.
| № варианта |
m1, v1, m2, α |
| 11 |
m1 = 150 г, v1 = 10 м/с, m2 = 100 г, α = 60° |
|
ФИЗИКА |
3-3-11 |
ТГУ. Практические занятия по физике. 2019 год |
300₽ |
|
|
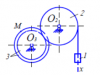
3289 |
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
Чему равна кинетическая энергия зубчатой передачи двух цилиндрических колес числом зубьев z2 = 2∙z1, если их момент инерции относительно осей вращения I2 = 2∙I1 = 6 кгм2, а угловая скорость колеса 1 равна ω1 = 10 рад/с.
|
Теоретическая механика |
Д3.7 |
Теоретическая механика 2 |
300₽ |
|
|
18148 |
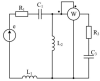
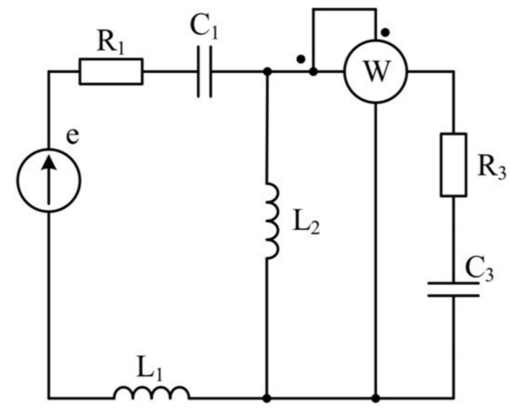
Пример расчёта электрической цепи синусоидальном тока комплексным методом
Для электрической цепей синусоидального однофазного тока, представленной на рисунке 2.6, необходимо выполнить следующее:
1. Определить токи в ветвях заданной электрической цепи, используя комплексный метод расчёта.
2. Составить баланс мощностей в комплексном виде.
3. Записать мгновенное значение тока в неразветвлённой части цепи.
4. Определить показание ваттметра.
5. Для любого замкнутого контура, содержащего источник ЭДС, построить векторную диаграмму напряжений, совмещённую с векторной диаграммой токов.
| Em, B |
φe, град |
R1, Ом |
R3, Ом |
L1, мГн |
L2, мГн |
C1, мкФ |
C3, мкФ |
| 127 |
40 |
18 |
14 |
41,5 |
16 |
796 |
159 |
|
Электротехника |
|
|
300₽ |
|
|
8606 |
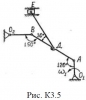
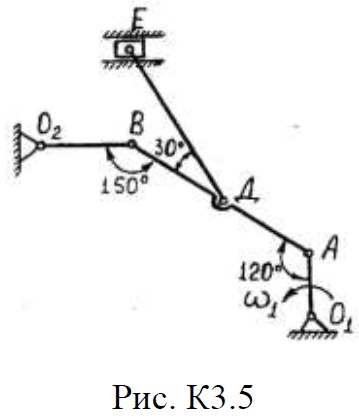
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
На рис. К3.5 показана схема механизма, причем
О1А = L1 = 0,4 м;
АВ = L2 = 1,4 м;
ДE = L3 = 1,2 м;
O2В = L4 = 0,6 м;
АД = ДВ.
Кривошип O1А вращается вокруг оси O1 с постоянной угловой скоростью ω1 = ωO1A = 4 с-1. Для заданного положения механизма построить мгновенные центры скоростей шатунов АВ и ДЕ, найти скорости точек A, B, Д, Е, угловые скорости указанных шатунов и кривошипа О2В, а также ускорение точки В.
|
Теоретическая механика |
K5.5 |
Теоретическая механика 2 |
300₽ |
|
|
14716 |
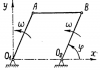
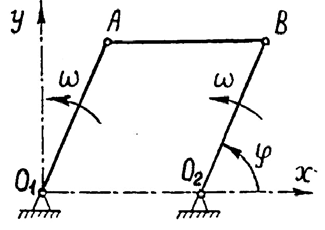
ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА МАСС
Механизм шарнирного параллелограмма состоит из трёх одинаковых стержней массой m и длиной l. Кривошипы ОА и ОrВ вращаются с постоянной угловой скоростью ω. Определить сумму горизонтальных составляющих реакций шарниров O1 и O2 в функции угла φ.
|
Теоретическая механика |
Д4.3 |
Теоретическая механика 2 |
300₽ |
|
|
8700 |
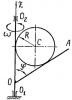
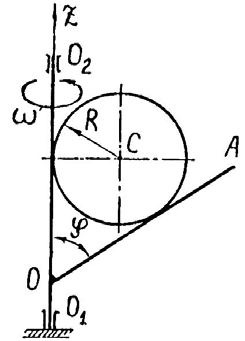
ПРИНЦИП ДАЛАМБЕРА
Тонкий однородный и гладкий диск массой m и радиусом R установлен между валом ОО1 и стержнем АВ, приваренным к валу под углом φ. Стержень и вал вращается вместе с диском с постоянной угловой скоростью ω. Определить давление диска на стержень и вал.
|
Теоретическая механика |
Д6.19 |
Теоретическая механика 2 |
300₽ |
|
|
5060 |
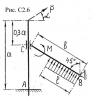 ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. С2.6, исходные данные указаны в таблице.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С2.6 |
2 |
2 |
1 |
1,8 |
2,5 |
0,8 |
60° |
|
Теоретическая механика |
C2.6_1 |
Теоретическая механика |
300₽ |
|
|
10914 |
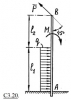
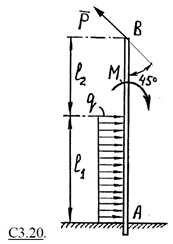
ОПРЕДЕЛЕНИЕ РЕАКЦИИ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Схемы конструкций построены на рис. СЗ. 1 - С3.20.
Столб AB нагружен силой P, распределенной нагрузкой интенсивности q и парой сил с моментом M. Определить реакции заделки.
P = 30 кH; q = 2 кН/м; M = 50 кН м; 11 = 4 м; 12 = 3 м.
|
Теоретическая механика |
C3.20. |
Теоретическая механика 2 |
300₽ |
|
|
13358 |
Шар массой m1, летящий со скоростью v1, сталкивается с неподвижным шаром массой m2. После удара шары разлетаются под углом α друг к другу. Удар абсолютно упругий, столкновение происходит в горизонтальной плоскости. Найти скорости шаров u1 и u2 после удара.
| № варианта |
m1, v1, m2, α |
| 19 |
m1 = 200 г, v1 = 10 м/с, m2 = 120 г, α = 80° |
|
ФИЗИКА |
3-3-19 |
ТГУ. Практические занятия по физике. 2019 год |
300₽ |
|
|
14566 |
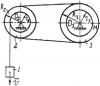
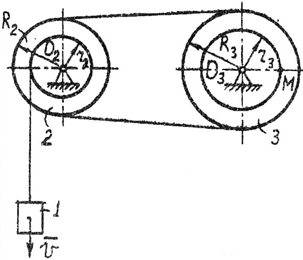
ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.4 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.4 |
Теоретическая механика 2 |
300₽ |
|