|
14586 |

ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
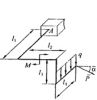
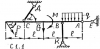
По заданному уравнению поступательного движения груза 1 S = S(t) определить в момент времени t1 угловые скорости и угловые ускорения шкивов 2 и 3, а также скорость, касательное, нормальное и полное ускорение точки М механизма. Схемы механизмов и необходимые для расчета данные представлены на рис. К3.1- К3.20, в табл. 3
| № варианта |
Уравнение движения груза 1 S = S(t), см |
R2 |
r2 |
R3 |
r3 |
t1 |
| К3.14 |
160t2 |
50 |
30 |
70 |
40 |
2 |
|
Теоретическая механика |
K3.14 |
Теоретическая механика 2 |
300₽ |
|
|
6367 |
ПРОСТРАНСТВЕННАЯ СИСТЕМА СИЛ
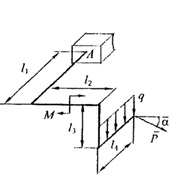
Изогнутая под прямыми углами пространственная рама концом А заделана в неподвижную опору и нагружена равномерно распределенной нагрузкой интенсивностью q или линейное I распределенной нагрузкой с максимальной интенсивностью qmax, парой сил с моментом M и силой P, расположенной в плоскости перпендикулярной участку рамы длиной l4 и образующей угол α с прямой изображенной на рисунке.
Определить опорные реакции рамы.
Варианты расчетных схем изображены па рисунке.
Номер на рисунке соответствует варианту задания. Числовые значения параметров приведены в таблице.
| Номер варианта |
P, Н |
M, Н∙м |
q, Н/м |
l1, м |
l2, м |
l3, м |
l4, м |
α, ° |
| 6 |
700 |
400 |
1000 |
1,6 |
1 |
1,2 |
1,2 |
-30 |
|
Теоретическая механика |
|
|
300₽ |
|
|
11138 |
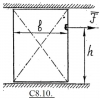
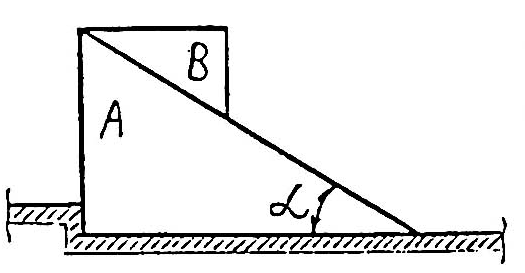
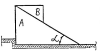
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
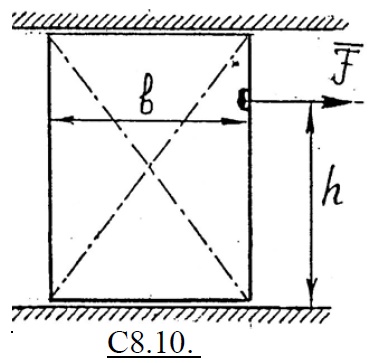
Расчетные схемы даны на рис. С8.10. Дверь в купе железнодорожного вагона может скользить в горизонтальных желобах, расположенных сверху и снизу. Коэффициент трения между дверью и нижним желобом равен f. Центр тяжести двери лежит на оси симметрии. Найти наибольшую высоту h ручки двери, при которой дверь не будет перекашиваться в желобах, если ее вес равен G, а ширина равна b.
|
Теоретическая механика |
C8.10 |
Теоретическая механика 2 |
300₽ |
|
|
5042 |
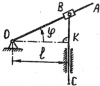
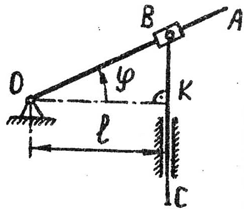
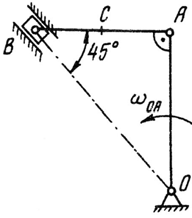
В кулисном механизме при качании кулисы ОА вокруг оси о ползун В, перемещаясь вдоль кулисы, приводит в движение стержень ВС . Определить скорость движения ползуна В относительно кулисы в функции её угловой скорости ω и угла поворота φ.
|
Теоретическая механика |
K7.8 |
Теоретическая механика 2 |
300₽ |
|
|
11218 |
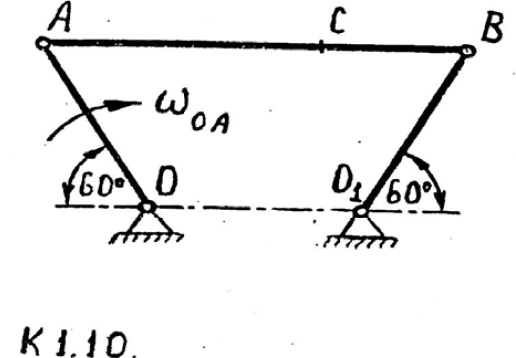
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.10 |
3sin(πt/2) |
4cos(πt/2) |
0,5 |
|
Теоретическая механика |
K1.10 |
Теоретическая механика 2 |
300₽ |
|
|
13812 |

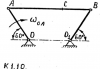
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис.
OA = 40 см = 0,40 м; AB = 30 см = 0,30 м; AC = 15 см = 0,15 м; ωOA = 2 c-1.
|
Теоретическая механика |
K 6-1 |
Теоретическая механика |
300₽ |
|
|
14604 |

ПЛОСКО-ПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Для заданного положения механизма найти скорости точек В и С, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис. К6.1-К6.20.
OA = 30 см; AB = 60 см; AC = 30 см; ωOA = 6 с-1
|
Теоретическая механика |
K6.11 |
Теоретическая механика 2 |
300₽ |
|
|
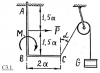
6487 |
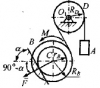
ПРИМЕНЕНИЕ ТЕОРЕМЫ ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ К ИЗУЧЕНИЮ ДВИЖЕНИЯ МЕХАНИЧЕСКОЙ СИСТЕМЫ
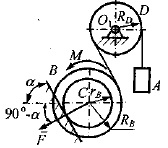
Механическая система, изображенная на рисунке, приводится в движение из состояния покоя. При этом колесо B катится без скольжения по вертикальной плоскости. Массы тел A, B и D (mA, mB, mD), заданная нагрузка F и M, радиус инерции ρB колеса B. Радиусы колеса B и шкива D соответственно равны RB = 0,8 м, RD = 0,2 м, rB = 0,5 м. Угол α имеет значение: α = 30°. Коэффициент трения качения колеса B равен k = 0,05∙RB; коэффициент трения скольжения тела B равен f = 0,1. Используя теорему об изменении кинетической энергии системы, определить скорость и ускорение тела A после того, как оно переместится на расстояние SA = 2 м. Шкив D считать однородным сплошным диском; силами сопротивления в подшипниках, массой троса, его растяжением и проскальзыванием по ободу шкива пренебречь.
| Номер варианта |
№ Дано |
mA, кг |
mB, кг |
mD, кг |
M, Н∙м |
F, Н |
ρB, см |
| 20 |
4 |
8 |
50 |
10 |
10 |
400 |
0.4 |
|
Теоретическая механика |
|
|
300₽ |
|
|
14100 |
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис.
OA = 30 см = 0,30 м; AB = 30 см = 0,30 м; AC = 20 см = 0,20 м; ωOA = 4 c-1.
|
Теоретическая механика |
K1.10 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
14686 |
На какую высоту H поднимется тело весом Р, брошенное вертикально вверх со скоростью V0, если сила сопротивления воздуха выражается формулой F = kV2, где k - постоянный коэффициент, V - скорость тела?
|
Теоретическая механика |
Д2.11 |
Теоретическая механика 2 |
300₽ |
|
|
8388 |

ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
На рис. К3.18 показана схема механизма, причем
О1А = L1 = 0,4 м;
АВ = L2 = 1,4 м;
ДE = L3 = 1,2 м;
O2В = L4 = 0,6 м;
АД = ДВ.
Ползун в данном положении механизма имеет скорость VB = 4 м/с и ускорение aB = 6 м/с2. Для заданного положения механизма построить мгновенные центры скоростей шатунов АВ и ДЕ, найти скорости точек А, Д, Е, угловые скорости указанных шатунов и кривошипа О1А, а также ускорение точки А.
|
Теоретическая механика |
K5.17 |
Теоретическая механика 2 |
300₽ |
|
|
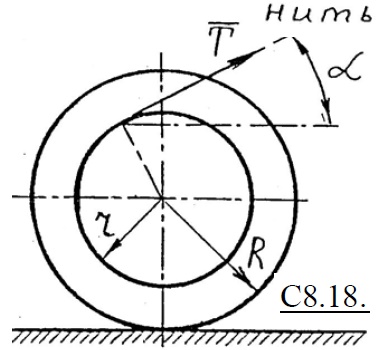
11154 |
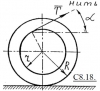
Расчетные схемы даны на рис. С8.18. Найти наибольшую величину силы Tmax, при приложении которой к катушке весом P при помощи нити начнется ее качение по горизонтальной плоскости. Радиусы катушки равны r и R, а ее коэффициент трения качения равен δ.
|
Теоретическая механика |
C8.18 |
Теоретическая механика 2 |
300₽ |
|
|
5059 |
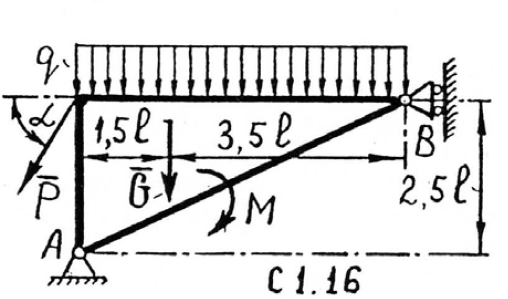
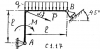
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции. Схемы конструкций указаны на рисунке С1.16, исходные данные приведены в таблице.
| Номер варианта |
P, кН |
G, кН |
M, кНм |
q, кН/м |
l, м |
α, град. |
| C1.16 |
6 |
9 |
3 |
5 |
2 |
60° |
|
Теоретическая механика |
C1.16 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
11234 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.18 |
5t - 6t2 |
2t |
1 |
|
Теоретическая механика |
K1.18 |
Теоретическая механика 2 |
300₽ |
|
|
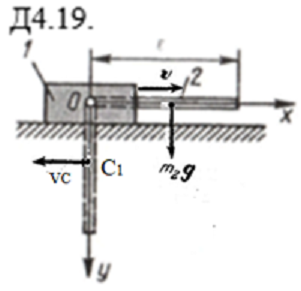
13894 |
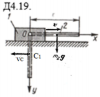
Тело 1 массой 6 кг может двигаться по горизонтальной направляющей. Тело 1 и однородный стержень 2 массой 3 кг и длиной l = 0,8 м опустился под действием силы тяжести и занимает вертикальное положение. В начальный момент система находилась в покое. Пренебрегая трением в оси А, найти скорость v бруска в тот момент, когда стержень проходит через вертикаль.
|
Теоретическая механика |
Д4.19 |
Теоретическая механика 2 |
300₽ |
|
|
8238 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. C1.10, исходные данные приведены в табл. 1.
| Номер варианта |
P, кН |
G, кН |
M, кНм |
q, кН/м |
l, м |
α, град |
| C1.10 |
15 |
10 |
50 |
- |
1 |
30° |
|
Теоретическая механика |
C1.10 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
14150 |
ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ. ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
Груз 1 массой m1, опускаясь вниз по призме, приводит в движение посредством нити, переброшенной через невесомый блок, груз 2 массой m2. Определить давление призмы на горизонтальную плоскость, если масса призмы равна m.
|
Теоретическая механика |
Д6.11 |
Теоретическая механика 2 |
300₽ |
|
|
8406 |

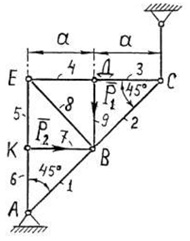
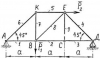
ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. С3.2 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| С3.2 |
1, 7, 5 |
2, 3 |
80 |
50 |
|
Теоретическая механика |
C3.2_1 |
Теоретическая механика |
300₽ |
|
|
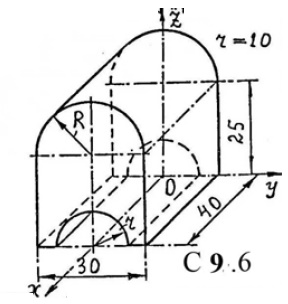
11170 |
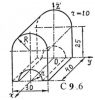
Найти положение центра тяжести плоской фермы, пластинки и объемного тела. Ферма состоит из однородных стержней; пластинка имеет малую постоянную толщину. Схемы тел показаны на рис. C9.6. Размеры ферм даны в метрах, остальных тел - в сантиметрах.
|
Теоретическая механика |
C9.6 |
Теоретическая механика 2 |
300₽ |
|
|
11256 |
КИНЕМАТИКА ТОЧКИ
Точка М движется по окружности радиуса R согласно уравнению S = S(t). Определить и построить для момента времени t1 скорость, касательное, нормальное и полное ускорение этой точки. Исходные данные для расчета приведены в табл. 2.
| № варианта |
S = S(t), cм |
R, см |
Время t1, с |
| К2.9 |
4t2 + 3 |
2t |
1 |
|
Теоретическая механика |
K2.9 |
Теоретическая механика 2 |
300₽ |
|
|
5128 |
ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Точка на ободе маховика в период разгона движется по закону φ = 0,8(t3 + 3t2), где угол φ задан в радианах, а время t - в секундах. Радиус маховика R = 1,6 м. Найти угловую скорость и угловое ускорение маховика, а также нормальное, касательное и полное ускорение точки обода маховика в тот момент времени, когда ее линейная скорость составляет v = 36 м/с. Сколько оборотов совершил маховик к этому моменту времени?
|
Теоретическая механика |
K4.18 |
Теоретическая механика 2 |
300₽ |
|
|
8636 |
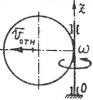
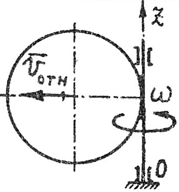
По диаметру диска, вращающегося вокруг вертикальной оси 0Z с угловой скоростью ω = 3t2 с-1, движется точка М по закону Sотн = 0,6t2 м/с. Определить абсолютную скорость точки М в момент времени t = 1 с.
|
Теоретическая механика |
K7.16 |
Теоретическая механика 2 |
300₽ |
|
|
11052 |
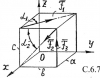
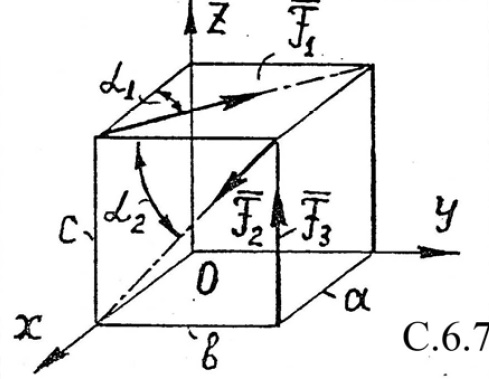
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C6.7 |
Теоретическая механика 2 |
300₽ |
|
|
8930 |

ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис.
OA = 40 см = 0,40 м; AB = 40 см = 0,40 м; AC = 20 см = 0,20 м; ωOA = 4 c-1.
|
Теоретическая механика |
K6.17 |
Теоретическая механика 2 |
300₽ |
|
|
11132 |

ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
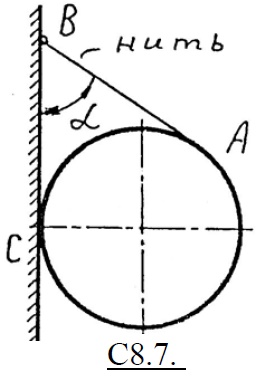
Расчетные схемы даны на рис. С8.7. Тяжелое однородное кольцо удерживается в равновесии нитью AB и силой трения, возникающей в точке C его контакта со стеной. При каком соотношении между коэффициентом трения f и утлом α это возможно? (α - угол наклона нити AB к вертикали).
|
Теоретическая механика |
C8.7 |
Теоретическая механика 2 |
300₽ |
|
|
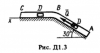
10604 |
ДИНАМИКА
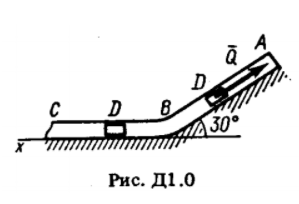
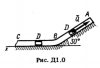
Груз D массой т, получив в точке A начальную скорость v0, движется по изогнутой трубе ABC, расположенной в вертикальной плоскости; участки трубы оба наклонные. На участке AB на груз кроме силы тяжести действуют сила Q (её направление показано на рисунках) и сила сопротивления R, зависящая от скорости v груза D: R = 0.8∙v2.
В точке B груз, не изменяя значения своей скорости, переходит на участок BC трубы, где на него кроме силы тяжести действует переменная сила F, проекция которой Fx на ось x задана в таблице: F = 4∙sin(4∙t).
Считая груз D материальной точкой, и зная расстояние AB или время t, движения груза от точки A до точки B, найти уравнение х = х(t) движения груза на участке BC.
Варианты расчетных схем изображены на рис. Д1.4.
Варианты числовых значений параметров приведены в табл. Д1.
| Вариант |
m, кг |
v0, м/с |
Q, Н |
R, Н |
l, м |
t1, c |
Fx, Н |
| 3 |
1,8 |
24 |
5 |
0,3∙v |
- |
2 |
-2∙cos(2∙t) |
|
Теоретическая механика |
|
Теоретическая механика |
300₽ |
|
|
8484 |
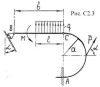
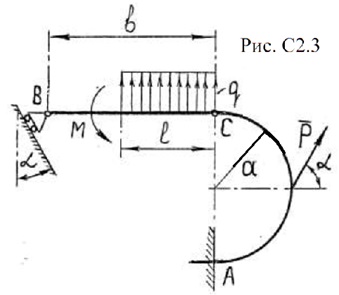
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. С2.3, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С2.3 |
3 |
4.8 |
2 |
2.8 |
1.5 |
1.2 |
30° |
|
Теоретическая механика |
C2.3_1 |
Теоретическая механика |
300₽ |
|
|
10908 |
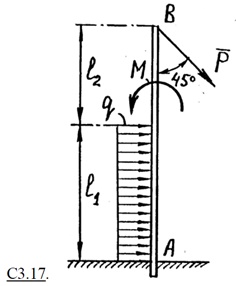
ОПРЕДЕЛЕНИЕ РЕАКЦИИ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Схемы конструкций построены на рис. СЗ. 1 - С3.20.
Столб АВ нагружен силой P, распределенной нагрузкой интенсивности q и парой сил с моментом М. Определить реакции заделки.
P = 30 кH; q = 2 кН/м; М = 50 кН м; l1 = 4 м; l2 = 3 м.
|
Теоретическая механика |
C3.17. |
Теоретическая механика 2 |
300₽ |
|
|
8566 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = x(t), у = y(t). найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 4.
| Номер варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| K1.12 |
2∙sin(πt/6) - 4 |
3∙cos(πt/6) |
2 |
|
Теоретическая механика |
K1.12_1 |
Теоретическая механика |
300₽ |
|
|
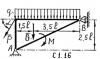
10988 |
СОСТАВЛЕНИЕ РАСЧЕТНОЙ СХЕМЫ ПЛОСКОЙ КОНСТРУКЦИИ
Используя принцип освобождаемости от связей, освободить плоскую конструкцию от связей и приложить к ней реакции связей. Равномерно-распределенную нагрузку заменить соответствующей равнодействующей силой. Силы, не параллельные осям координат, разложить на составляющие, параллельные осям координат. Построить расчетную схему конструкции. Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. C1.17, исходные данные приведены в табл. 1.
| Номер варианта |
Р, кН |
G, кН |
M, кН∙м |
q, кН∙м |
l, м |
α, град |
| C1.17 |
12 |
6 |
8 |
3 |
1 |
30° |
|
Теоретическая механика |
C1.17 |
Теоретическая механика 2 |
300₽ |
|
|
11068 |
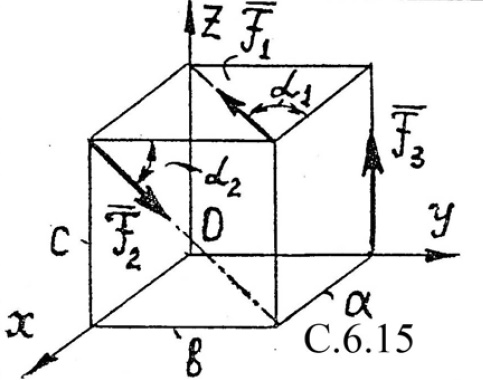
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C6.15 |
Теоретическая механика 2 |
300₽ |
|
|
10844 |
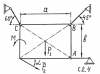
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
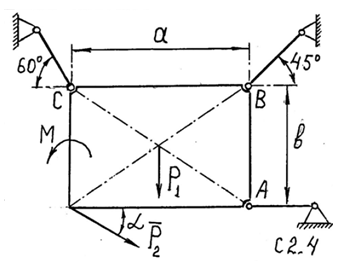
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.17, -исходные данные приведены в таблице 2.
| Номер варианта |
Р1, кН |
P2, кН |
P3, кН |
M кН∙м |
a, м |
b, м |
α, град |
| С-2.4. |
5 |
6 |
0 |
3 |
1.2 |
0.8 |
30° |
|
Теоретическая механика |
C2.4. |
Теоретическая механика 2 |
300₽ |
|
|
8500 |
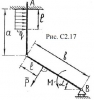
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
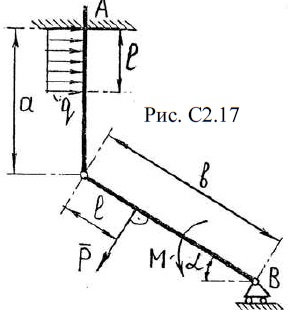
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. С2.17, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С2.17 |
4 |
3.6 |
4 |
1.0 |
2.2 |
1.2 |
60° |
|
Теоретическая механика |
C2.17_1 |
Теоретическая механика |
300₽ |
|
|
10924 |

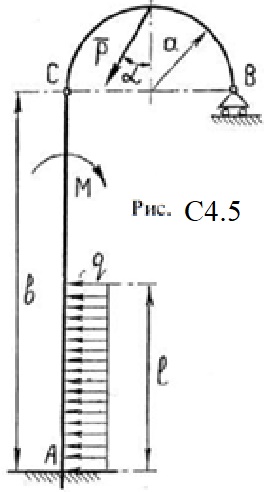
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. C4.5, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| C4.5 |
4 |
3.2 |
3 |
2.5 |
4 |
2.8 |
30° |
|
Теоретическая механика |
C4.5 |
Теоретическая механика 2 |
300₽ |
|
|
8588 |
ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Колесо, имеющее неподвижную ось вращения, получило начальную угловую скорость 4π c-1. Сделав 20 оборотов, оно вследствие трения в подшипниках, остановилось. Определить угловое ускорение колеса, считая его постоянным, а также время вращения колеса до остановки.
|
Теоретическая механика |
K4.12 |
Теоретическая механика 2 |
300₽ |
|
|
11004 |
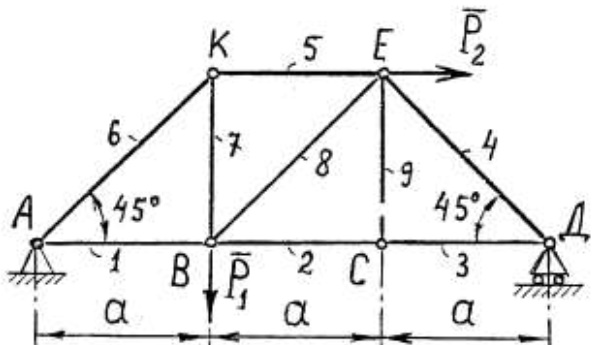
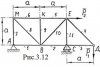
ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. C5.3 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| C5.3 |
2, 9, 4 |
1, 6 |
60 |
70 |
|
Теоретическая механика |
C5.3 |
Теоретическая механика 2 |
300₽ |
|
|
11084 |

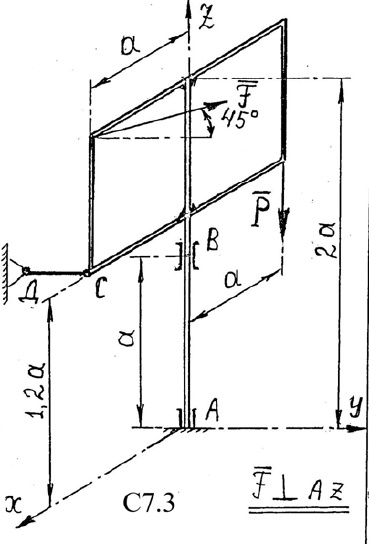
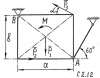
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунке.
|
Теоретическая механика |
C7.3 |
Теоретическая механика 2 |
300₽ |
|
|
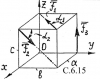
9060 |
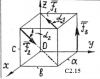
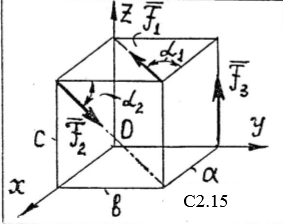
ОПРЕДЕЛЕНИЕ ХАРАКТЕРИСТИК ДЕЙСТВИЯ ПРОСТРАНСТВЕННОЙ СИСТЕМЫ СИЛ
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C2.15 |
Теоретическая механика |
300₽ |
|
|
10860 |
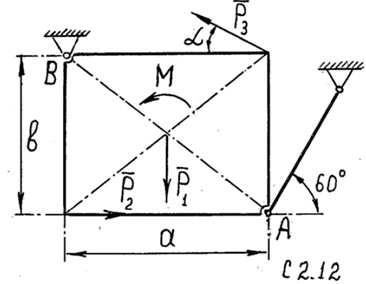
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.12, -исходные данные приведены в таблице 2.
| Номер варианта |
Р1, кН |
P2, кН |
P3, кН |
M кН∙м |
a, м |
b, м |
α, град |
| С-2.12. |
6 |
5 |
6 |
4 |
1.1 |
0.9 |
60° |
|
Теоретическая механика |
C2.12. |
Теоретическая механика 2 |
300₽ |
|
|
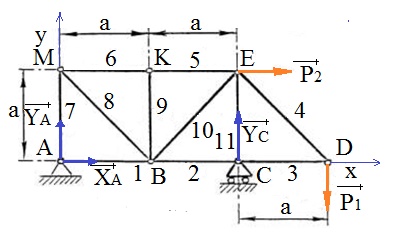
8516 |
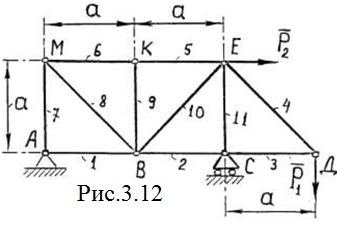
ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. С3.12 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| С3.12 |
1, 8, 6 |
3, 4 |
150 |
130 |
|
Теоретическая механика |
C3.12_1 |
Теоретическая механика |
300₽ |
|
|
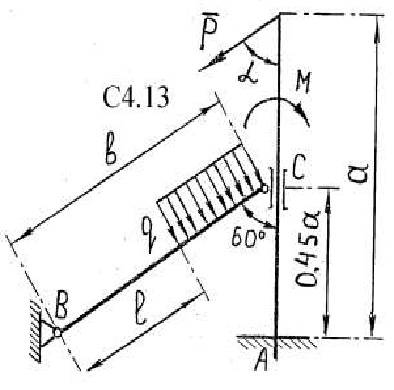
10940 |
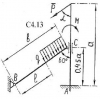
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. C4.13, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| C4.13 |
5 |
6 |
2 |
3 |
2.5 |
1.0 |
60° |
|
Теоретическая механика |
C4.13 |
Теоретическая механика 2 |
300₽ |
|
|
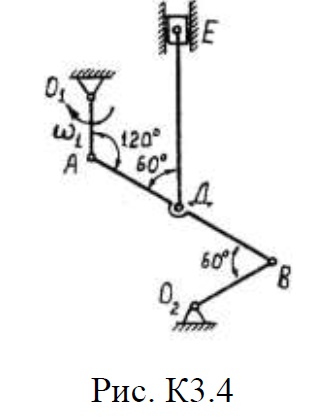
8604 |

ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
На рис. К3.4 показана схема механизма, причем
О1А = L1 = 0,4 м;
АВ = L2 = 1,4 м;
ДE = L3 = 1,2 м;
O2В = L4 = 0,6 м;
АД = ДВ.
Кривошип O1А вращается вокруг оси O1 с постоянной угловой скоростью ω1 = ωO1A = 4 с-1. Для заданного положения механизма построить мгновенные центры скоростей шатунов АВ и ДЕ, найти скорости точек A, B, Д, Е, угловые скорости указанных шатунов и кривошипа О2В, а также ускорение точки В.
|
Теоретическая механика |
K5.4 |
Теоретическая механика 2 |
300₽ |
|
|
11020 |

ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. C5.11 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| C5.11 |
2, 11, 4 |
6, 7 |
190 |
120 |
|
Теоретическая механика |
C5.11 |
Теоретическая механика 2 |
300₽ |
|
|
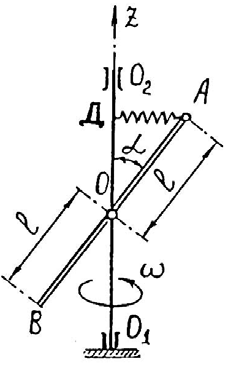
8698 |

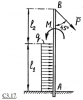
ПРИНЦИП ДАЛАМБЕРА
Тонкий однородный стержень ОА массой m и длиной l, закрепленный шарнирно в своей середине О на оси ОО1 (оси Оу), вращается во-круг этой оси с постоянной угловой скоростью ω. При этом он удерживается в положении, образующем угол α с осью ОО1 при помощи пружины АД. Определить усилие в пружине
|
Теоретическая механика |
Д6.16 |
Теоретическая механика 2 |
300₽ |
|
|
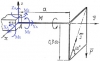
11100 |

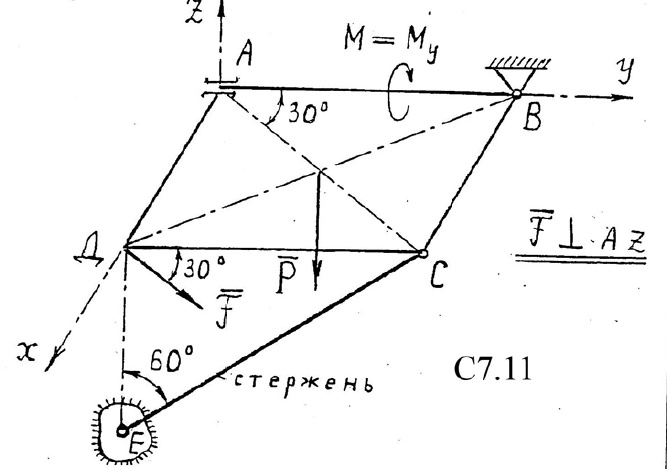
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунке.
|
Теоретическая механика |
C7.11 |
Теоретическая механика 2 |
300₽ |
|
|
10602 |
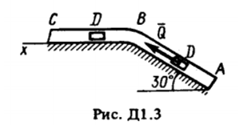
ДИНАМИКА
Груз D массой т, получив в точке A начальную скорость v0, движется по изогнутой трубе ABC, расположенной в вертикальной плоскости; участки трубы оба наклонные. На участке AB на груз кроме силы тяжести действуют сила Q (её направление показано на рисунках) и сила сопротивления R, зависящая от скорости v груза D: R = 0.8∙v2.
В точке B груз, не изменяя значения своей скорости, переходит на участок BC трубы, где на него кроме силы тяжести действует переменная сила F, проекция которой Fx на ось x задана в таблице: F = 4∙sin(4∙t).
Считая груз D материальной точкой, и зная расстояние AB или время t, движения груза от точки A до точки B, найти уравнение х = х(t) движения груза на участке BC.
Варианты расчетных схем изображены на рис. Д1.4.
Варианты числовых значений параметров приведены в табл. Д1.
| № Варианта |
m, кг |
v0, м/с |
Q, Н |
R, Н |
l, м |
t1, c |
Fx, Н |
| 0 |
2,4 |
12 |
5 |
0,8∙v2 |
1.5 |
- |
4∙sin(4∙t) |
|
Теоретическая механика |
|
Теоретическая механика |
300₽ |
|
|
8438 |

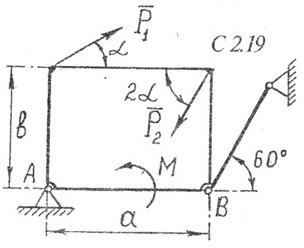
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.19, -исходные данные приведены в таблице 2.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С-2.19 |
8 |
10 |
5 |
0.8 |
1.6 |
0.8 |
30° |
|
Теоретическая механика |
C2.19 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
10876 |
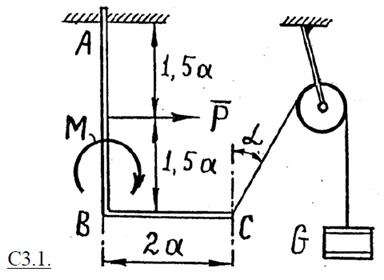
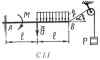
ОПРЕДЕЛЕНИЕ РЕАКЦИИ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Схемы конструкций построены на рис. СЗ. 1 - С3.20. Кронштейн ABC, весом которого пренебрегаем, испытывает действие груза весом G, пары сип с моментом M и силы P. Определить реакции заделки.
G = 4 кН; P = 9 кН; M = 12 кНм; a = 1,5 м; α = 45°.
|
Теоретическая механика |
C3.1. |
Теоретическая механика 2 |
300₽ |
|
|
8534 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунках С4.10.
|
Теоретическая механика |
C4.10_1 |
Теоретическая механика |
300₽ |
|
|
10956 |
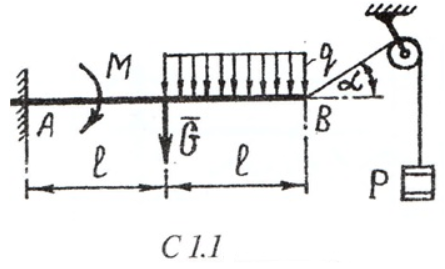
СОСТАВЛЕНИЕ РАСЧЕТНОЙ СХЕМЫ ПЛОСКОЙ КОНСТРУКЦИИ
Используя принцип освобождаемости от связей, освободить плоскую конструкцию от связей и приложить к ней реакции связей. Равномерно-распределенную нагрузку заменить соответствующей равнодействующей силой. Силы, не параллельные осям координат, разложить на составляющие, параллельные осям координат. Построить расчетную схему конструкции. Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схема конструкции представлена на рис. C1.1, исходные данные приведены в табл. 1.
| Номер варианта |
Р, кН |
G, кН |
M, кН∙м |
q, кН∙м |
l, м |
α, град |
| C1.1 |
4 |
12 |
4 |
3 |
1 |
60° |
|
Теоретическая механика |
C1.1 |
Теоретическая механика 2 |
300₽ |
|