|
8660 |
ПЕРВАЯ ЗАДАЧА ДИНАМИКИ МАТЕРИАЛЬНОЙ ТОЧКИ
Определить давление человека массой m = 80 кг на площадку лифта в начале подъёма и перед остановкой; ускорение (замедление) лифта a = 0,2g.
|
Теоретическая механика |
Д1.20 |
Теоретическая механика 2 |
100₽ |
|
|
8664 |
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
Маховое колесо радиуса r и веса P вращается вокруг своей оси с угловой скоростью ω. Колесо останавливают с помощью тормозной колодки силой R, линия действия которой проходит через ось маховика перпендикулярно этой оси. Найти коэффициент трения между тормозной колодкой и ободом колеса, если оно до остановки сделано N оборотов. Трением в подшипниках пренебречь.
|
Теоретическая механика |
Д3.2 |
Теоретическая механика 2 |
300₽ |
|
|
8666 |
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
Барабан массой m и радиусом r приводится во вращательное движение из состояния покоя моментом M. Определить ускорение поднимаемого с помощью троса груза массой m1. Барабан считать однородным цилиндром, массой троса пренебречь.
|
Теоретическая механика |
Д3.3 |
Теоретическая механика 2 |
300₽ |
|
|
8668 |
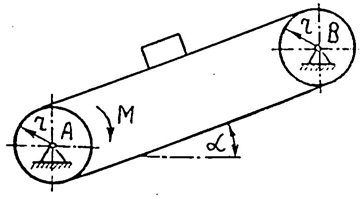
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
Транспортёр приводится в движение из состояния покоя моментом M, приложенным к нижнему шкиву. Определить ускорение груза массой m, если шкивы A и B радиусом r и массой m1 каждый представляют собой однородные круглые цилиндры. Лента транспортёра, массой которой следует пренебречь, образует с горизонтом угол α. Скольжение ленты по шкивам и груза по ленте отсутствует.
|
Теоретическая механика |
Д7,19 |
Теоретическая механика 2 |
300₽ |
|
|
8670 |
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
На горизонтальный вал насажен маховик диаметром D делающий n [об/мин]. Определить коэффициент трения скольжения между валом и подшипниками, если после выключения привода маховик сделал N оборотов до остановки. Массу маховика считать равномерно распределённой по его ободу. Массой вала пренебречь.
|
Теоретическая механика |
D2.8_1 |
Теоретическая механика |
200₽ |
|
|
8672 |
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
Однородный диск массой m= 30 кг радиуса R = 1 м начинает вращаться из состояния покоя равноускоренно с постоянным угловым ускорением ε = 2 рад/c2. Определить кинетическую энергию диска в момент времени t = 2 c после начала движения.
|
Теоретическая механика |
Д3.11 |
Теоретическая механика 2 |
100₽ |
|
|
8674 |
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
Снаряд массой m вылетает из ствола орудия со скоростью v0. Длина ствола орудия l. Найти силу среднего давления газов на снаряд.
|
Теоретическая механика |
Д3.12 |
Теоретическая механика 2 |
150₽ |
|
|
8676 |
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
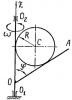
Какую начальную скорость, параллельную линии наибольшего ската наклонной плоскости, надо сообщить оси колеса радиуса R дня того, чтобы оно, катясь без скольжения, поднялось на высоту H по наклонной плоскости, образующей угол α с горизонтом? Коэффициент трения качения равен δ. Колесо считать однородным диском.
|
Теоретическая механика |
Д3.13 |
Теоретическая механика 2 |
200₽ |
|
|
8678 |
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
Лыжник скатывается с горки. Длина горки - l, угол наклона горки с горизонтом - α, коэффициент трения между лыжами и снегом – f. Найти расстояние, пройденное лыжником на горизонтальном участке до остановки.
|
Теоретическая механика |
Д3.16 |
Теоретическая механика 2 |
200₽ |
|
|
8682 |
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
Шар весом P, лежащий на пружине с коэффициентом жёсткости c, вызывает статическую осадку пружины 0,025 м. Какова будет осадка пружины, если тот же шар упадёт на пружину с высоты h = 0,1 м? Массой пружины пренебречь
|
Теоретическая механика |
Д3.19 |
Теоретическая механика 2 |
300₽ |
|
|
8684 |
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
Пружина имеет в ненапряжённом состоянии длину 20 см. Сила, необходимая для изменения её длины на 0,01 м, равна 1,96 Н. С какой скоростью v вылетит из трубки шарик массой 0,03 кг, если пружина была сжата до длины 0,1 м. Трубка с пружиной расположена горизонтально.
|
Теоретическая механика |
Д3.20 |
Теоретическая механика 2 |
300₽ |
|
|
8686 |
ПРИНЦИП ДАЛАМБЕРА
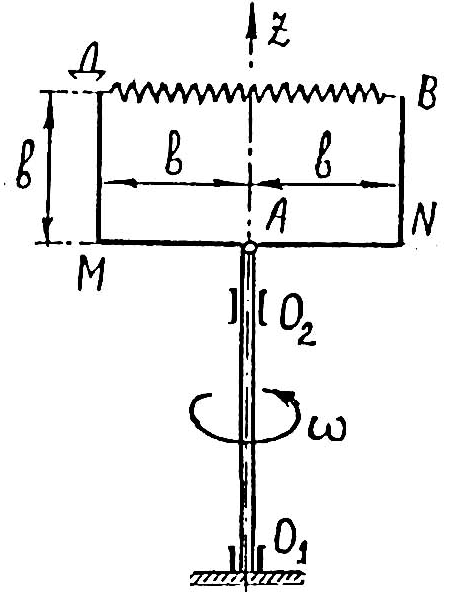
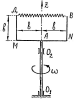
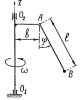
Тонкие однородные стержни АВС и АДЕ одинаковой массы m, изогнутые под прямым углом, соединены в точке А шарниром. Стержни вращается вокруг вертикальной оси Оу с постоянной угловой скоростью ω. При этом они удерживаются в положении, при котором части ВС и ДЕ параллельны, а АВ и АД перпендикулярны оси вращения, при помощи пружины СЕ. Определить усилие в пружине.
|
Теоретическая механика |
Д6.1 |
Теоретическая механика 2 |
300₽ |
|
|
8688 |

ПРИНЦИП ДАЛАМБЕРА
Однородная проволочная полуокружность массой m радиусом R вращается с постоянной угловой скоростью ω вокруг оси ОА (оси Оу). Определить реакции в точках крепления В и D кольца к стержню OA. Расстояние от центра тяжести полукольца до оси ОA: $$x_C=\frac{2R}{3\pi}$$.
|
Теоретическая механика |
Д6.3 |
Теоретическая механика 2 |
300₽ |
|
|
8690 |
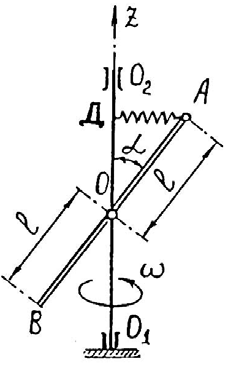
ПРИНЦИП ДАЛАМБЕРА
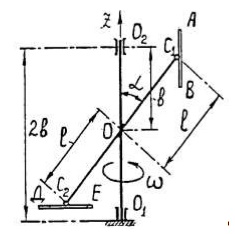
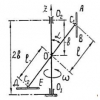
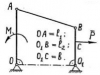
Два тонких однородных стержня AB и DE одинаковой массы m скреплены невесомым стержнем C1C2. Стержень жёстко соединён с вертикальной осью O1O2, с которой он образует угол α. Стержни вращаются вокруг оси O1O2 с постоянной угловой скоростью ω. Даны размеры: O1O = OO2 = b; C1O = OC2 = l; AC1 = C1B; DC2 = C2E. Определить реакции подпятника и подшипника.
|
Теоретическая механика |
Д6.4 |
Теоретическая механика 2 |
300₽ |
|
|
8692 |
ПРИНЦИП ДАЛАМБЕРА
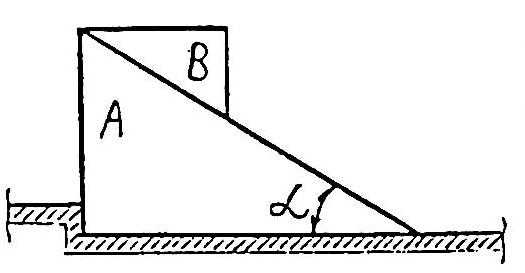
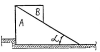
Клин 1 массой m опускается по наклонной стороне клина 2, образующей угол α = 30° с горизонтом. Определить давление клина 2 на выступ пола.
|
Теоретическая механика |
Д6.12 |
Теоретическая механика 2 |
300₽ |
|
|
8698 |

ПРИНЦИП ДАЛАМБЕРА
Тонкий однородный стержень ОА массой m и длиной l, закрепленный шарнирно в своей середине О на оси ОО1 (оси Оу), вращается во-круг этой оси с постоянной угловой скоростью ω. При этом он удерживается в положении, образующем угол α с осью ОО1 при помощи пружины АД. Определить усилие в пружине
|
Теоретическая механика |
Д6.16 |
Теоретическая механика 2 |
300₽ |
|
|
8700 |
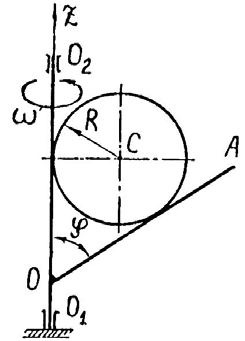
ПРИНЦИП ДАЛАМБЕРА
Тонкий однородный и гладкий диск массой m и радиусом R установлен между валом ОО1 и стержнем АВ, приваренным к валу под углом φ. Стержень и вал вращается вместе с диском с постоянной угловой скоростью ω. Определить давление диска на стержень и вал.
|
Теоретическая механика |
Д6.19 |
Теоретическая механика 2 |
300₽ |
|
|
8702 |
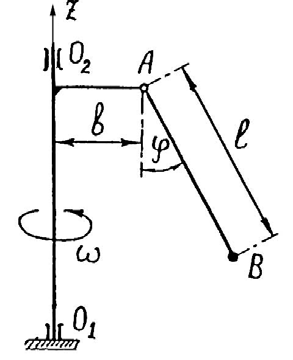
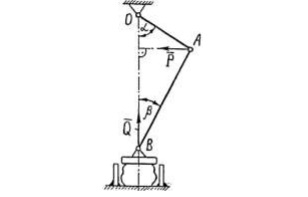
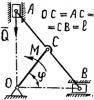
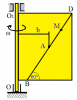
ПРИНЦИП ДАЛАМБЕРА
Невесомый стержень ВС длиной l, на конце которого распо-ложен точечный груз С массой m, вращается вокруг вертикальной оси ОА (оси Оу) с постоянной угловой скоростью ω. Расстояние от шарнира В до оси вращения равно b. Определить значение угловой скорости ω, если стержень ВС отклонился от вертикали на угол φ.
|
Теоретическая механика |
Д6.20 |
Теоретическая механика 2 |
300₽ |
|
|
8704 |
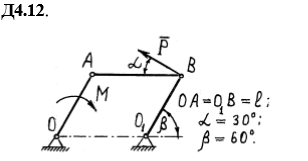
ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
Механизм и составные конструкции, показанные на рис. Д4.1 находятся в состоянии равновесия. Дано значение силы P. Найти значение момента M.
|
Теоретическая механика |
Д8.1 |
Теоретическая механика 2 |
200₽ |
|
|
8708 |
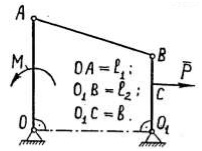
ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
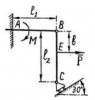
Определить реактивный момент заделки A составной конструкции.
|
Теоретическая механика |
Д8.4 |
Теоретическая механика 2 |
200₽ |
|
|
8710 |

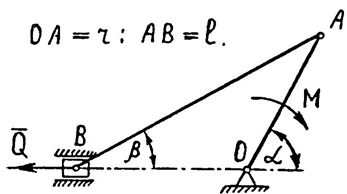
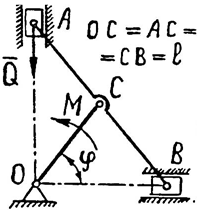
ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
Механизм и составные конструкции, показанные на рис. Д4.3 находятся в состоянии равновесия. Дано значение силы Q. Найти значение момента M.
|
Теоретическая механика |
Д8.3 |
Теоретическая механика 2 |
200₽ |
|
|
8712 |

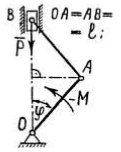
ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
Дано значение момента M. Найти значение силы P.
|
Теоретическая механика |
Д8.8 |
Теоретическая механика 2 |
200₽ |
|
|
8714 |
ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
Определить значение силы P.
|
Теоретическая механика |
Д8.11 |
Теоретическая механика 2 |
200₽ |
|
|
8716 |
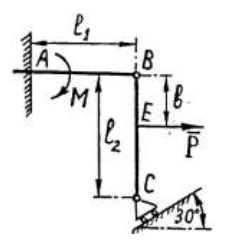
ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
Механизм и составные конструкции, показанные на рис. Д4.12 находятся в состоянии равновесия. Определить значение силы P.
|
Теоретическая механика |
Д8.12 |
Теоретическая механика 2 |
200₽ |
|
|
8718 |
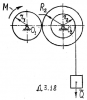
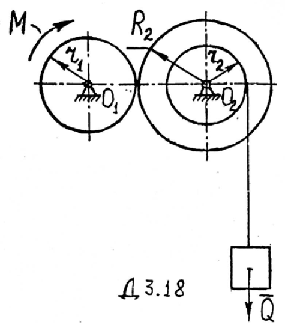
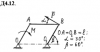
ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ. ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
По известному значению момента пары М найти значение силы Q; радиусы шкивов – r1, r2 и R.
|
Теоретическая механика |
D3.18 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
8720 |
ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
Определить значение силы Q.
|
Теоретическая механика |
Д8.16 |
Теоретическая механика 2 |
200₽ |
|
|
8722 |

ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
Дано значение силы P. Найти значение силы Q.
|
Теоретическая механика |
Д8.20 |
Теоретическая механика 2 |
100₽ |
|
|
8724 |

ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
Механизм и составные конструкции, показанные на рис. Д4.19 находятся в состоянии равновесия. Дано значение силы Q. Найти значение силы P.
|
Теоретическая механика |
Д8.19 |
Теоретическая механика 2 |
200₽ |
|
|
8792 |
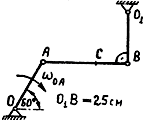
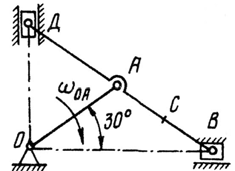
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис.
OA = 25 см = 0,25 м; AB = 40 см = 0,40 м; AC = 25 см = 0,25 м; ωOA = 5 c-1; OB1 = 25 см.
|
Теоретическая механика |
K6.9 |
Теоретическая механика 2 |
300₽ |
|
|
8926 |

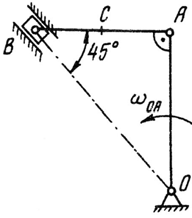
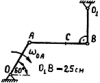
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис.
OA = 30 см = 0,30 м; O1B = 30 см = 0,30 м; AB = 40 см = 0,40 м; AC = 20 см = 0,20 м; ωOA = 2 c-1.
|
Теоретическая механика |
K6.3. |
Теоретическая механика 2 |
300₽ |
|
|
8928 |
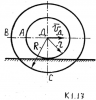
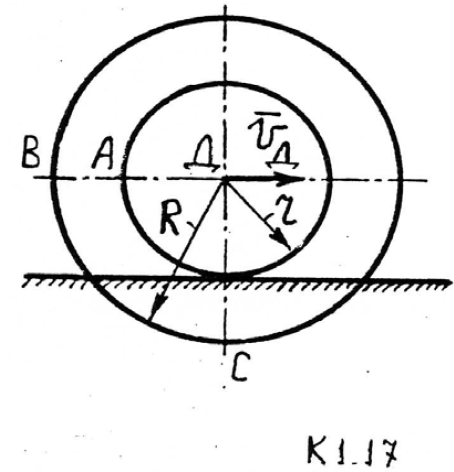
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис.
AB = R = 10 см; r = 15 см; R = 25 см; vA = 25 см/с.
|
Теоретическая механика |
K1.17. |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
8930 |

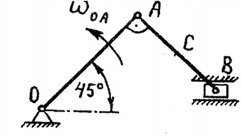
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис.
OA = 40 см = 0,40 м; AB = 40 см = 0,40 м; AC = 20 см = 0,20 м; ωOA = 4 c-1.
|
Теоретическая механика |
K6.17 |
Теоретическая механика 2 |
300₽ |
|
|
8932 |
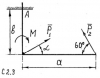
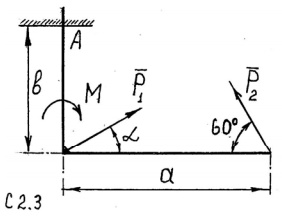
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
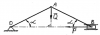
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. С2.8, исходные данные указаны в таблице.
| Номер варианта |
Р1, кН |
P2, кН |
P3, кН |
M, кН м |
a, м |
b, м |
α, град |
| С2.3. |
8 |
7 |
0 |
2 |
1.2 |
0.9 |
30° |
|
Теоретическая механика |
C2.3.-2 |
Теоретическая механика |
300₽ |
|
|
8934 |
ОПРЕДЕЛЕНИЕ ХАРАКТЕРИСТИК ДЕЙСТВИЯ ПРОСТРАНСТВЕННОЙ СИСТЕМЫ СИЛ
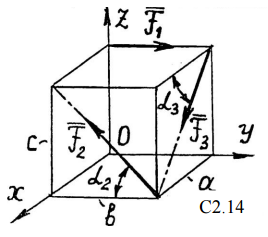
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C2.3 |
МИИТ. Теоретическая механика. 2014 год |
300₽ |
|
|
8936 |
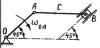
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
Для заданного положения механизма найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис. K14.l.
OA = 30 см = 0,30 м; AB = 40 см = 0,40 м; AC = 15 см = 0,15 м; ωOA = 4 c-1.
|
Теоретическая механика |
K6.14 |
Теоретическая механика 2 |
300₽ |
|
|
8938 |

ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
Для заданного положения механизма найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис. K1.l.
OA = 40 см = 0,40 м; AB = 30 см = 0,30 м; AC = 15 см = 0,15 м; ωOA = 2 c-1.
|
Теоретическая механика |
K6.1 |
Теоретическая механика 2 |
300₽ |
|
|
8968 |
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис.
OA = 30 см = 0,30 м; AB = 30 см = 0,30 м; AC = 15 см = 0,15 м; ωOA = 4 c-1.
|
Теоретическая механика |
K6.18 |
Теоретическая механика 2 |
300₽ |
|
|
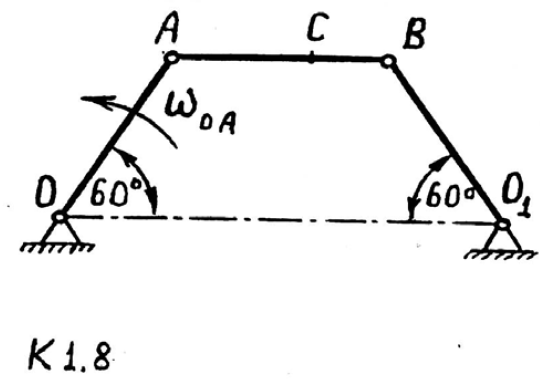
8972 |
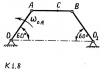
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис.
OA = 30 см = 0,30 м; AB = 30 см = 0,30 м; AC = 20 см = 0,20 м; ωOA = 4 c-1.
|
Теоретическая механика |
K1.8 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
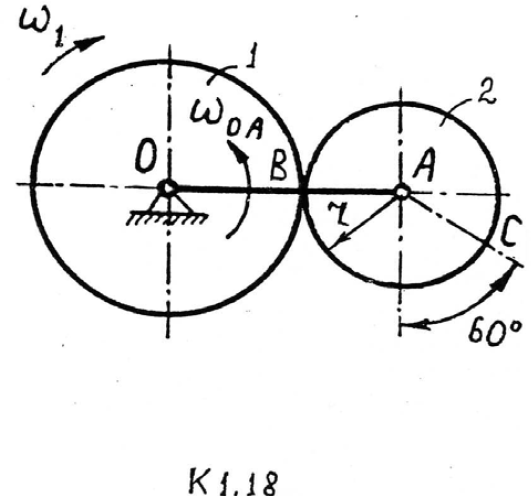
8974 |
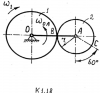
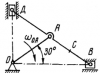
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис.
AB = R + r = 35 см = 0,35 м; r = 15 см =0,15 м; AC = 15 см = 0,15 м; ωOA = 2 c-1; ω1 = 2,5 c-1.
|
Теоретическая механика |
K1.18. |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
9004 |
ОПРЕДЕЛЕНИЕ ХАРАКТЕРИСТИК ДЕЙСТВИЯ ПРОСТРАНСТВЕННОЙ СИСТЕМЫ СИЛ
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллепипеда с ребрами a = 2 м, b = c = 6 м, причем F1 = 5 кН, F2 = 7 кН, F3 = 3 кН.
|
Теоретическая механика |
C1.7. |
МИИТ. Теоретическая механика. 2014 год |
150₽ |
|
|
9012 |

ЦЕНТР МАСС ТЕЛА
Найти положение центра тяжести пластинки представленной на рисунке 3.18. Размеры даны в сантиметрах.
|
Теоретическая механика |
C3.18. |
Теоретическая механика |
200₽ |
|
|
9014 |

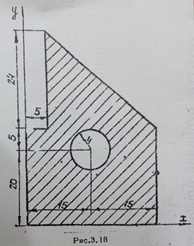
ЦЕНТР МАСС ТЕЛА
Найти положение центра тяжести пластинки представленной на рисунке 3.16. Размеры даны в сантиметрах.
|
Теоретическая механика |
C3.16. |
Теоретическая механика |
200₽ |
|
|
9020 |
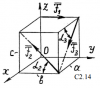
ОПРЕДЕЛЕНИЕ ХАРАКТЕРИСТИК ДЕЙСТВИЯ ПРОСТРАНСТВЕННОЙ СИСТЕМЫ СИЛ
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C2.14. |
Теоретическая механика |
300₽ |
|
|
9022 |
СТАТИКА
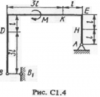
Жесткая рама (рис C1.4, табл. C1) закреплена в точке A шарнирно, а в точке B прикреплена или к невесомому стержню BB1, или к шарнирной опоре на катках, стержень прикреплен к раме и к неподвижной опоре шарнирами
На раму действуют пара сил с моментом M = 100 Н∙м и две силы, значения которых, направления и точки приложения указаны в таблице (например, в условиях № 1 на раму действуют сила F1 = 10 Н под углом 30° горизонтальной оси, приложенная в точке K, и сила F4 = 40 Н под углом 60° к горизонтальной оси, приложенная в точке H).
Определить реакции связей в точках A и B, вызываемые заданными нагрузками. При окончательных подсчетах принять l = 0,5 м.
|
Теоретическая механика |
C1.4 |
Теоретическая механика |
300₽ |
|
|
9024 |
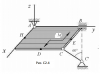
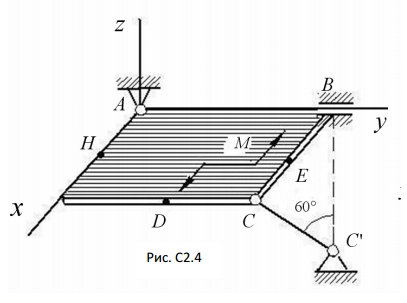
Однородная прямоугольная плита весом P = 5 кН со сторонами AB = 3l, BC = 2l закреплена в точке A сферическим шарниром, а в точке B цилиндрическим шарниром (подшипником) и удерживается в равновесии невесомым стержнем СС’ (рис. C2.4)
На плиту действует пара сил с моментом M = 6 кН м, лежащая в плоскости плиты, и две силы. Значения этих сил, их направления и точки приложения указаны в табл. C2. при этом силы F1 и F2 лежат в плоскостях, параллельных плоскости xy, сила F2 — в плоскости, параллельной xz, сила F2 — в плоскости, параллельной yz. Точки приложения сил (D,E,H) находятся в серединах сторон плиты.
Определить реакции связей в точках A, B и C. При подсчетах принять l = 0,8 м.
|
Теоретическая механика |
C2.4. |
Теоретическая механика |
300₽ |
|
|
9026 |

КИНЕМАТИКА
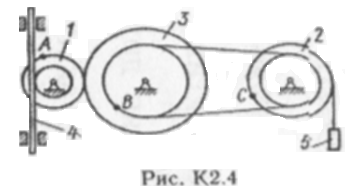
Механизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза S, привязанного к концу нити, намотанной на одно из колес (рис K2.0 — K2 9, табл. K2). Радиусы ступеней колес равны соответственно у колеса 1 — r1 = 2 см, R1 = 4 см, у колеса 2 — r2 = 6 см, R2 = 8 см, у колеса 3 — r3 = 12 см, R3 = 16 см. На ободьях колес расположены точки A, B и C.
| Номер условия |
Дано |
Найти |
| скорости |
ускорения |
| 4 |
φ3 = 3t - t2 |
v4, ω1 |
ε1, aB, a5 |
В столбце «Дано» таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ1(t) — закон вращения колеса 1, S4(t) — закон движения рейки 4, ω2(t) — закон изменения угловой скорости колеса 2, v3(t) — закон изменения скорости груза 5 и т д (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s4, s5 и v4, v5 — вниз.
Определить в момент времени t1 = 2 с указанные в таблице в столбцах «Найти» скорости (v — линейные, ω — угловые) и ускорения (a — линейные, ε — угловые) соответствующих точек или тел (v5— скорость груза 5 и т.д.).
Дано: R1 = 4 см, r1 = 2 см; R2 = 8 см, r2 = 6 см, R3 = 16 см, r3 = 12 см, B — точка обода колеса 3, t1 = 2 с Определить ω1, v4, aB, a5, ε1 в момент времени t = t1.
|
Теоретическая механика |
K2.4. |
Теоретическая механика |
300₽ |
|
|
9028 |
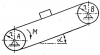
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
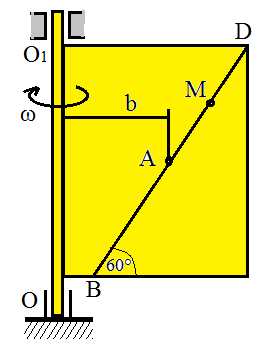
Прямоугольная пластина (рис К4.4) вращается вокруг неподвижной оси с постоянной угловой скоростью ω = -3 с-1 заданной в табл. К3 (при знаке минус направление ω противоположно показанному на рисунке). Ось вращения на рис K4.4 ось вращения OO1 лежит в плоскости пластины (пластина вращается в пространстве)
| № усл |
ω, с-1 |
Рис. 0-5 |
| b, см |
S = AM = f(t) |
| 4 |
-3 |
10 |
50∙(t3 - t) - 30 |
По пластине вдоль прямой BD (рис K4.4) движется точка M. Закон ее относительного движения, выражаемый уравнением $s=AM=50(t^3-t)-30$ (s — в сантиметрах, t — в секундах), задан в табл. K4 отдельно для рис. K4.4. На всех рисунках точка M показана в положении, при котором s = AM > 0 (при s > 0 точка М находится по другую сторону от точки А).
Определить абсолютную скорость и абсолютное ускорение точки M в момент времени t1 = 1 с.
|
Теоретическая механика |
K4.4. |
Теоретическая механика |
300₽ |
|
|
9060 |
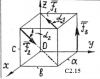
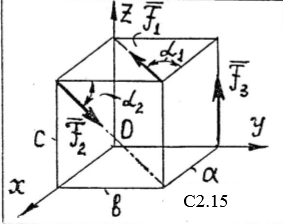
ОПРЕДЕЛЕНИЕ ХАРАКТЕРИСТИК ДЕЙСТВИЯ ПРОСТРАНСТВЕННОЙ СИСТЕМЫ СИЛ
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C2.15 |
Теоретическая механика |
300₽ |
|
|
9062 |

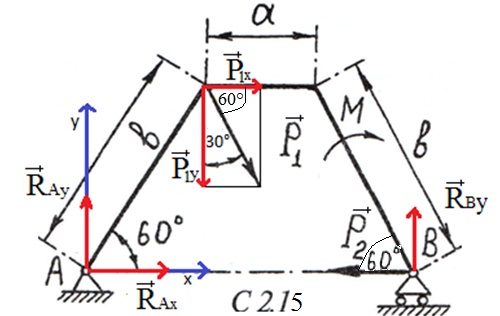
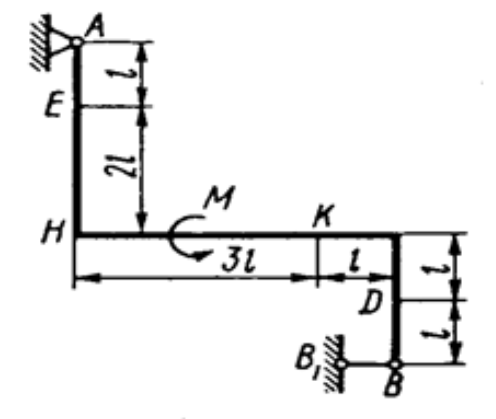
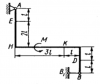
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.1, -исходные данные приведены в таблице 2.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| C2.15. |
20 |
20 |
6 |
3 |
4 |
- |
60° |
|
Теоретическая механика |
C2.15. |
Теоретическая механика |
300₽ |
|
|
9702 |
СТАТИКА
Жесткая рама (рис C1.4, табл. C1) закреплена в точке A шарнирно, а в точке B прикреплена или к невесомому стержню BB1, или к шарнирной опоре на катках, стержень прикреплен к раме и к неподвижной опоре шарнирами
На раму действуют пара сил с моментом M= 100 Н∙м и две силы, значения которых, направления и точки приложения указаны в таблице (например, в условиях № 1 на раму действуют сила F1 = 10 Н под углом 30° горизонтальной оси, приложенная в точке K, и сила F4 = 40 Н под углом 60° к горизонтальной оси, приложенная в точке H).
Определить реакции связей в точках A и B, вызываемые заданными нагрузками. При окончательных подсчетах принять l = 0,5 м.
Указания. Задача С1 — на равновесие тела под действием плоской системы сил. Составляя уравнения равновесия, учесть, что уравнение моментов будет более простым (содержать меньше неизвестных), если брать моменты относительно точки, где пересекаются линии действия двух реакций связей (в данном случае относительно точки A). При вычислении момента силы F часто удобно разложить её на составляющие F' и F", для которых плечи легко вычисляются, в частности на составляющие, параллельные координатным осям, и воспользоваться теоремой Вариньона. Тогда m0(F) = m0(F) + m0(F")
| Сила |
F1 = 10 H |
F2 = 20 H |
F3 = 30 H |
F4 = 40 H |
| Номер условия |
Точка прилож. |
a1 |
Точка прилож. |
a2 |
Точка прилож. |
а3 |
Точка прилож. |
а4 |
| 0 |
- |
- |
D |
60 |
Е |
45 |
- |
- |
|
Теоретическая механика |
|
|
300₽ |
|