|
8568 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = x(t), у = y(t). найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 4.
| Номер варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| K1.13 |
4t2 + 1 |
4t |
1 |
|
Теоретическая механика |
K1.13_1 |
Теоретическая механика |
300₽ |
|
|
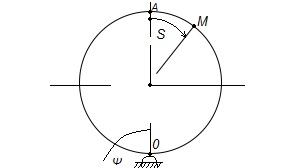
14188 |

Круглая пластина радиуса R = 0,5 (м) вращается вокруг неподвижной оси О по закону φ =4t2 - 5t (рад). По окружности пластины движется точка М. Закон ее относительного движения S = 5πt2 (м). Определить абсолютную скорость и абсолютное ускорение точки в момент времени t1 = 1 с. Показать на рисунках все векторы скоростей и ускорений.
|
Теоретическая механика |
D3.22 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
5065 |
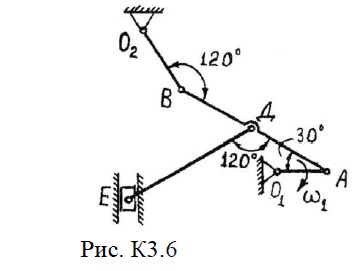
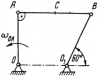
 ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
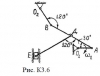
На рис. К3.6 показаны схемы механизмов, причем
О1А = L1 = 0,4 м;
АВ = L2 = 1,4 м;
ДE = L3 = 1,2 м;
02В = L4 = 0,6 м;
АД = ДВ.
Кривошип O1А вращается вокруг оси O1 с постоянной угловой скоростью ω1 = ωOA = 4 с-1. Для заданного положения механизма построить мгновенные центры скоростей шатунов АВ и ДЕ, найти скорости точек А, В, Д, Е, угловые скорости указанных шатунов и кривошипа О2В, а также ускорение точки В.
|
Теоретическая механика |
K5.6 |
Теоретическая механика 2 |
300₽ |
|
|
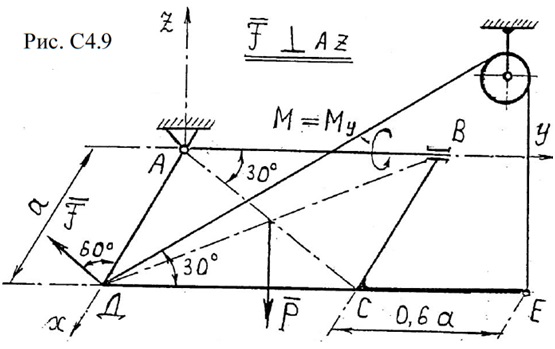
5126 |

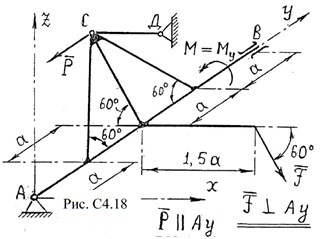
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунках С4.18.
|
Теоретическая механика |
C4.18_1 |
Теоретическая механика |
300₽ |
|
|
16905 |
Задано движение точки координатным способом и некоторый момент времени. Найти траекторию точки. Для заданного момента времени найти положение точки, скорость, ускорение, касательное и нормальное ускорение, радиус кривизны траектории. Все найденные величины изобразить на рисунке в подходящем масштабе так, чтобы все векторы были хорошо видны.
| x = x(t), см |
y = y(t), см |
Время t1, с |
| -3t |
0,5t2-4t |
2 |
|
Теоретическая механика |
|
|
300₽ |
|
|
8334 |
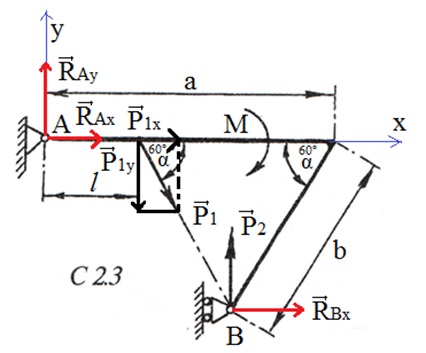
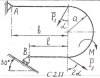
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.3 -исходные данные приведены в таблице 2.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С2.3 |
5 |
3 |
4 |
2,4 |
1,6 |
0,8 |
60° |
|
Теоретическая механика |
C2.3 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
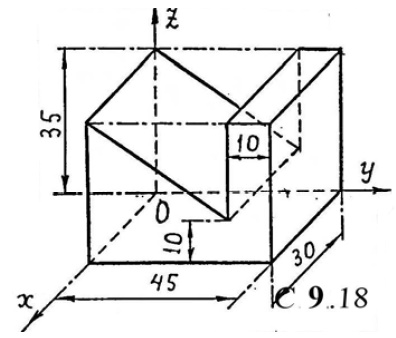
11194 |
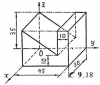
ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ОДНОРОДНОГО ТЕЛА
Найти положение центра тяжести плоской фермы, пластинки и объемного тела. Ферма состоит из однородных стержней; пластинка имеет малую постоянную толщину. Схемы тел показаны на рис. C9.18. Размеры ферм даны в метрах, остальных тел - в сантиметрах.
|
Теоретическая механика |
C9.18 |
Теоретическая механика 2 |
300₽ |
|
|
8502 |
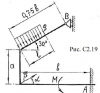
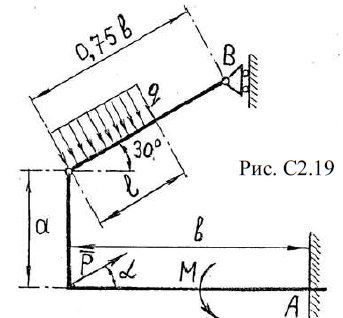
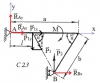
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. С2.19, исходные данные указаны в таблице 3.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С2.19 |
5 |
4 |
3 |
2.5 |
2.0 |
1.3 |
30° |
|
Теоретическая механика |
C2.19_1 |
Теоретическая механика |
300₽ |
|
|
8428 |
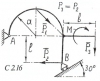
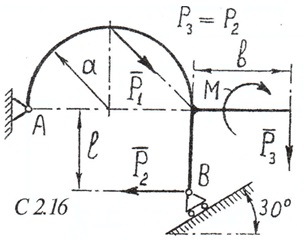
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.16, -исходные данные приведены в таблице 2.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С-2.16 |
3 |
4 |
6 |
0.8 |
1 |
0.8 |
- |
|
Теоретическая механика |
C2.16 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
8590 |
ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Маховик вращается вокруг неподвижной оси по закону φ = At3 + Bt2, где φ задан в радианах, а время t - в секундах; A и B – постоянные коэффициенты. В момент времени t1 = 3 с угловая скорость маховика и его угловое ускорение имели значения ω1 = 72 c-1 и ε = 42 c-2. Определить угловое ускорение маховика, а также скорость и ускорение его точки, отстоящей от оси вращения на 20 см в момент времени t2 = 4 c.
|
Теоретическая механика |
K4.13 |
Теоретическая механика 2 |
300₽ |
|
|
5090 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунках С4.9.
|
Теоретическая механика |
C4.9_1 |
Теоретическая механика |
300₽ |
|
|
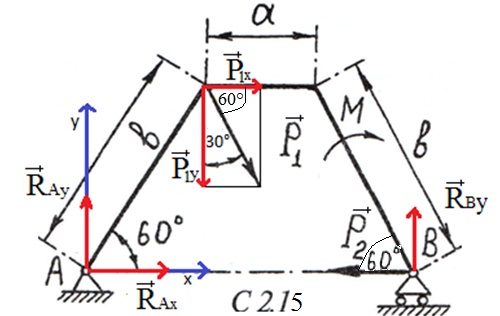
9062 |

ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.1, -исходные данные приведены в таблице 2.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| C2.15. |
20 |
20 |
6 |
3 |
4 |
- |
60° |
|
Теоретическая механика |
C2.15. |
Теоретическая механика |
300₽ |
|
|
5561 |
Определить модули главного вектора и главного момента относительно центра O пространственной системы сил (F1, F2, F3). Силы приложены к вершинам прямоугольного параллепипеда с ребрами a = 1 м, b = c = 3 м, причем F1 = 2 кН, F2 = 3 кН, F3 = 5 кН.
|
Теоретическая механика |
C2.10. |
МИИТ. Теоретическая механика. 2014 год |
300₽ |
|
|
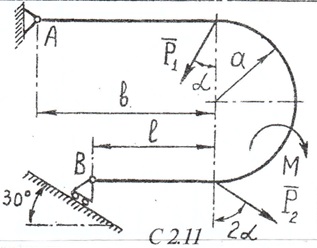
8350 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.11 -исходные данные приведены в таблице 2.
Таблица 2
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| C2.11 |
8 |
7 |
9 |
0,8 |
1,2 |
- |
30° |
|
Теоретическая механика |
C2.11 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
11210 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.6 |
5sin(πt/3) |
3cos(πt/3) - 2 |
2 |
|
Теоретическая механика |
K1.6 |
Теоретическая механика 2 |
300₽ |
|
|
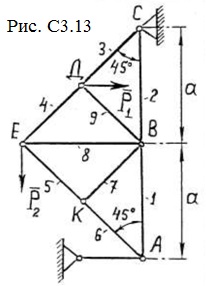
8518 |

ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. С3.13 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| С3.13 |
1,7,5 |
2,3 |
70 |
120 |
|
Теоретическая механика |
C3.13_1 |
Теоретическая механика |
300₽ |
|
|
12590 |
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Для заданного положения механизма. Найти скорости точек B и C, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис. K6.1-K6.20
OA = 30 см = 0,30 м; AB = 50 см = 0,50 м; AC = 25 см = 0,25 м; ωOA = 3 c-1.
|
Теоретическая механика |
K6.15 |
Теоретическая механика 2 |
300₽ |
|
|
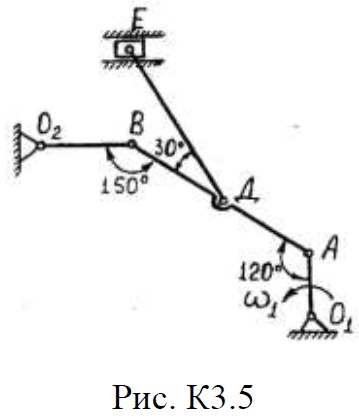
8606 |
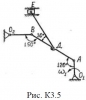
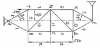
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
На рис. К3.5 показана схема механизма, причем
О1А = L1 = 0,4 м;
АВ = L2 = 1,4 м;
ДE = L3 = 1,2 м;
O2В = L4 = 0,6 м;
АД = ДВ.
Кривошип O1А вращается вокруг оси O1 с постоянной угловой скоростью ω1 = ωO1A = 4 с-1. Для заданного положения механизма построить мгновенные центры скоростей шатунов АВ и ДЕ, найти скорости точек A, B, Д, Е, угловые скорости указанных шатунов и кривошипа О2В, а также ускорение точки В.
|
Теоретическая механика |
K5.5 |
Теоретическая механика 2 |
300₽ |
|
|
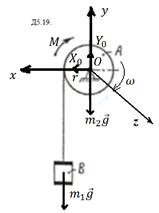
14064 |

При пуске в ход лебедки к барабану А приложен вращающий момент, пропорциональный времени M = λt где λ - коэффициент пропорциональности; t - время. Груз В массой m1 поднимается при помощи каната, намотанного на барабан A радиусом r и массой m2. Определить угловую скорость барабана, считая его сплошным цилиндром.
|
Теоретическая механика |
Д5.19 |
Теоретическая механика 2 |
300₽ |
|
|
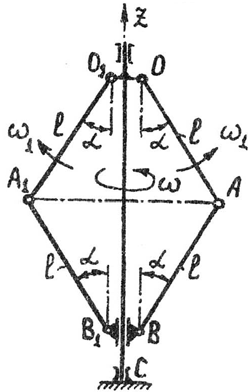
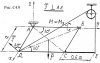
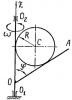
3287 |

Шары центробежного регулятора Уатта, вращающегося во-круг вертикальной оси Сz с угловой скоростью ω = 2 с-1, благодаря изменению нагрузки машины отходят от этой оси, имея для своих стержней в данном положении угловую скорость ω = 1,2 с-1. Найти абсолютную скорость шаров регулятора, если длина стержней l = 0,5 м, рас-стояние между осями их подвеса О1О = 2е = 0,1 м, угол α = 30°.
|
Теоретическая механика |
K7.7 |
Теоретическая механика 2 |
300₽ |
|
|
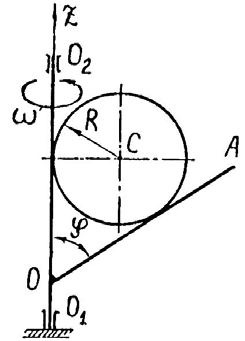
8700 |
ПРИНЦИП ДАЛАМБЕРА
Тонкий однородный и гладкий диск массой m и радиусом R установлен между валом ОО1 и стержнем АВ, приваренным к валу под углом φ. Стержень и вал вращается вместе с диском с постоянной угловой скоростью ω. Определить давление диска на стержень и вал.
|
Теоретическая механика |
Д6.19 |
Теоретическая механика 2 |
300₽ |
|
|
5100 |
 ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ СОСТАВНОЙ ПЛОСКОЙ КОНСТРУКЦИИ
Определить реакции связей в точках А и В составной плоской конструкции, состоящей из двух твердых тел. Схемы конструкций приведены на рис. С2.10, исходные данные указаны в таблице.
| Номер варианта |
Р, кН |
М, кНм |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С2.10 |
4 |
1.6 |
3 |
1 |
3.0 |
1.5 |
60 |
|
Теоретическая механика |
C2.10_1 |
Теоретическая механика |
300₽ |
|
|
6363 |
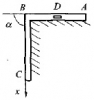
ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Груз D массой т, получив в точке A начальную скорость движется по изогнутой трубе ABC, расположенной в вертикальной плоскости.
На участке AB трубы на груз, кроме силы тяжести, действует сила сопротивления R, зависящая от скорости v груза D: R=0,1∙v .
В точке B груз, изменив направление приобретенной скорости, но сохранив при этом ее величину, переходит на участок BC трубы, где на него, помимо силы тяжести, действует сила трения скольжения (коэффициент трения груза о трубу f = 0,2) и переменная по величине сила F = 3∙sin(π∙t), направленная вдоль участка BC. Проекция Fx последней силы на ось Bx задается.
Считая груз D материальной точкой, и зная расстояние AB или время t, движения груза от точки A до точки B, найти уравнение х = х(t) движения груза на участке BC.
Варианты расчетных схем изображены на рис. 2.1. Варианты числовых значений параметров приведены в таблице.
| Номер варианта |
№ Дано |
m, кг |
v0, м/с |
µ, Н∙с/м |
n |
F, Н |
α, град |
t, сек |
| 27 |
1 |
5 |
2 |
0,1 |
1 |
3∙sin(πt) |
30 |
3 |
|
Теоретическая механика |
|
|
300₽ |
|
|
11146 |
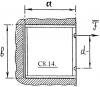
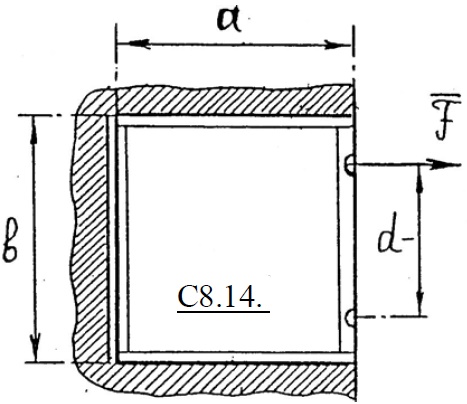
ТРЕНИЕ СКОЛЬЖЕНИЯ И ТРЕНИЕ КАЧЕНИЯ
Расчетные схемы даны на рис. С8.14. Ящик стола имеет две симметрично расположенные ручки для выдвигания. Каково должно быть расстояние d между этими ручками, чтобы ящик при выдвигании не застревал? Ширина ящика и его длина соответственно a, b. Коэффициент трения скольжения равен f. Весом ящика пренебречь.
|
Теоретическая механика |
C8.14 |
Теоретическая механика 2 |
300₽ |
|
|
8440 |
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОЙ КОНСТРУКЦИИ
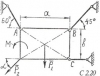
Определить реакции связей заданной плоской конструкции, находящейся под действием плоской системы сил. Схемы конструкций представлены на рис. С 2.20, -исходные данные приведены в таблице 2.
| Номер варианта |
Р, кН |
М, кН м |
q, кН/м |
a, м |
b, м |
l, м |
α, град |
| С-2.20 |
12 |
9 |
4 |
1.6 |
1 |
- |
45° |
|
Теоретическая механика |
C2.20 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
11226 |
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х = х(t), у = у(t) найти траекторию точки, а также для заданного момента времени t = t1 найти положение точки на ее траектории, определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус кривизны в соответствующей точке траектории. Исходные данные для расчета приведены в табл. 1.
| № варианта |
х = х(t), cм |
у = у(t), см |
Время t1, с |
| К1.14 |
3cos(πt/6) |
2sin(πt/6) - 3 |
5 |
|
Теоретическая механика |
K1.14 |
Теоретическая механика 2 |
300₽ |
|
|
8536 |

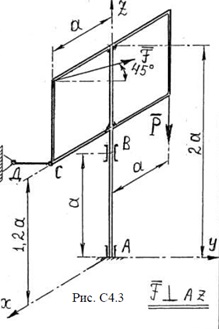
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПРОСТРАНСТВЕННОЙ КОНСТРУКЦИИ
Определить реакции связей пространственной конструкции, находящейся под действием сил F, P и пары сил с моментом М. Для всех вариантов принять F = 200 H, P = 300 H, M = 60 Нм, a = 1 м, схемы конструкций представлены на рисунках С4.3.
|
Теоретическая механика |
C4.3_1 |
Теоретическая механика |
300₽ |
|
|
8622 |
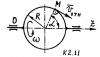
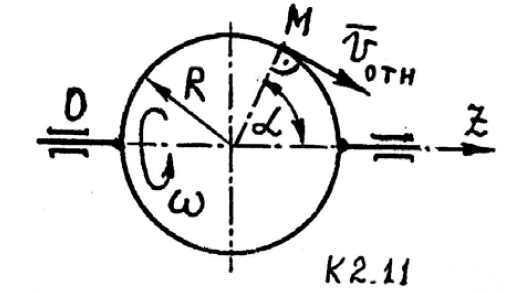
Диск радиуса R = 0,3 м вращается вокруг оси OZ с угловой скоростью ω = 2 с-1. По его ободу движется точка с постоянной скоростью vотн = 2 м/с (рис. К 2.11). Определить абсолютную скорость точки в указанном положении, если угол α = 60°.
|
Теоретическая механика |
K2.11 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
14810 |
Груз D массой m, получив в точке A начальную скорость v0, движется в изогнутой трубе АВС, расположенной в вертикальной плоскости; участки трубы или оба наклонные, или один горизонтальный, а другой наклонный (рис.3.1, табл. 3.2).
На участке АВ на груз кроме силы тяжести действуют постоянная сила Q (ее направление показано на рисунках).
В точке B груз, не изменяя своей скорости, переходит на участок BC трубы, где на него кроме силы тяжести действует переменная сила F, проекция которой Fx на ось х задана в таблице.
Считая груз материальной точкой и зная время t1 движения груза от точки A до точки B, найти скорость груза на участке BC через t2 = 2 сек. после выхода из точки B. Трением груза о трубу пренебречь.
| Вариант |
m, кг |
v0, м/c |
Q, Н |
t1, с |
Fx, Н |
| 7 |
1,6 |
18 |
4 |
2 |
3t |
|
Теоретическая механика |
Д1-7 |
Методичка по термеху. Нижний Новгород. 2019 год |
300₽ |
|
|
5039 |
ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Ротор турбины имел угловую скорость, соответствующую 3000 об/мин. Вращаясь затем равнозамедленно, он уменьшил за 20 с свою угловую скорость до 1500 об/мин. Сколько оборотов сделал ротор за это время? Найти время вращения ротора до остановки.
|
Теоретическая механика |
K4.8 |
Теоретическая механика 2 |
300₽ |
|
|
8718 |
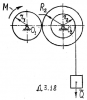
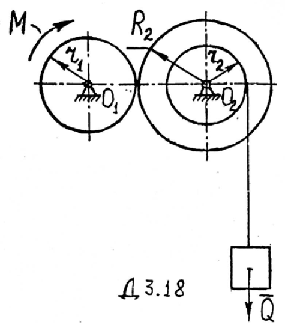
ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ. ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
По известному значению момента пары М найти значение силы Q; радиусы шкивов – r1, r2 и R.
|
Теоретическая механика |
D3.18 |
МИИТ. Теоретическая механика. 2012 год |
300₽ |
|
|
11632 |

Механическая система, состоящая из четырех тел, приходит в движение под действием сил тяжести из состояния покоя. Начальное положение системы показано на рисунках 2.1-2.5. Учитывая трение качения тела 4 (вариант 19), пренебрегая другими силами сопротивления и массами нитей, предполагаемых нерастяжимыми, определить:
1. Скорость тела 1 в тот момент времени, когда пройденный им путь станет равным S1.
2. Ускорения тел, движущихся поступательно и ускорения центров масс тел, совершающих плоскопараллельное движение, угловое ускорение тел, совершающих вращательное и плоскопараллельное движения.
| Вариант № |
m1 |
m2 |
m3 |
m4 |
i2x |
i3x |
f |
δ, м |
| 19 |
6m |
3m |
2m |
m |
1,3r |
1,2r |
- |
0,001 |
|
Теоретическая механика |
|
|
400₽ |
|
|
16913 |
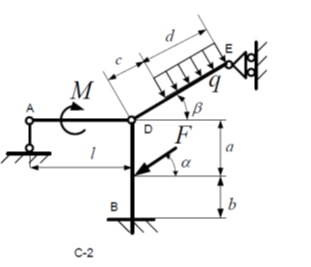
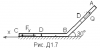
Для указанной на рисунке (С-2) конструкции найти значения неизвестных реакций внешних и внутренних связей.
| № |
a, см |
b, см |
c, см |
d, см |
l, см |
α, ° |
β, ° |
q, Н/м |
F, Н |
M, Н∙м |
| 8 |
40 |
30 |
30 |
50 |
80 |
45 |
30 |
6 |
3 |
5 |
|
Теоретическая механика |
|
|
400₽ |
|
|
8398 |
Тележка начинает движение из состояния покоя под действием момента М, приложенного к передним колёсам. Масса тележки без колёс равна m1, масса каждого из четырёх колёс радиусом r равна m2, коэффициент трения качения fδ. Определить ускорение тележки, считая колёса однородными дисками.
|
Теоретическая механика |
Д7.18 |
Теоретическая механика 2 |
400₽ |
|
|
8618 |
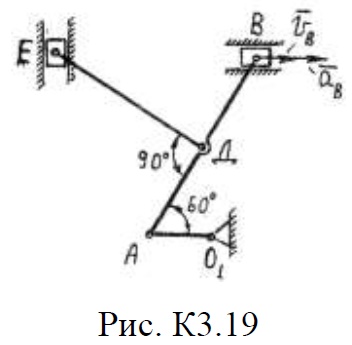
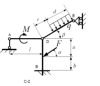
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
На рис. К3.19 показана схема механизма, причем
О1А = L1 = 0,4 м;
АВ = L1 = 1,4 м;
ДE = L3 = 1,2 м;
O2В = L4 = 0,6 м;
АД = ДВ.
Ползун в данном положении механизма имеет скорость VB = 4 м/с и ускорение aB = 6 м/с2. Для заданного положения механизма построить мгновенные центры скоростей шатунов АВ и ДЕ, найти скорости точек А, Д, Е, угловые скорости указанных шатунов и кривошипа О1А, а также ускорение точки А.
|
Теоретическая механика |
K1.19 |
Теоретическая механика 2 |
400₽ |
|
|
11006 |

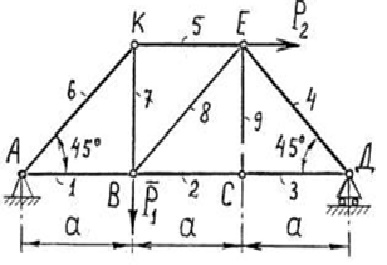
ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. C5.4 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| C5.41 |
2, 8, 5 |
3, 4 |
70 |
90 |
|
Теоретическая механика |
C5.4 |
Теоретическая механика 2 |
400₽ |
|
|
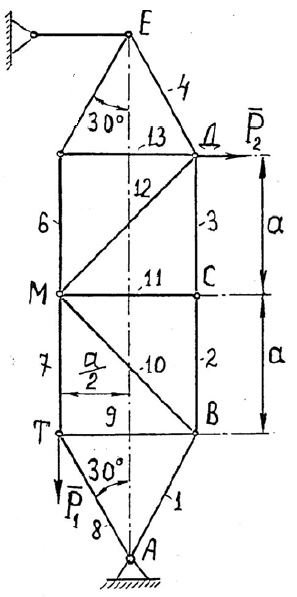
11038 |
ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия в стержнях плоской фермы рис. C5.19 соответственно способом разрезов Риттера и способом вырезания стержней с узлом фермы. Номера стержней и исходные данные указаны в табл. 4
| Номер варианта |
Номера стержней |
Номера стержней |
Р1, кН |
Р2, кН |
| C5.19 |
7, 10, 2 |
5, 4 |
170 |
200 |
|
Теоретическая механика |
C5.19 |
Теоретическая механика 2 |
400₽ |
|
|
14486 |

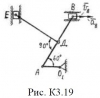
Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
25 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14242 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры — в см.
|
Теоретическая механика |
1 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14414 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
7 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14456 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
15 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14480 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
22 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14508 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н ). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
30 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14408 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
6 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14450 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
11 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14472 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
19 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14494 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
27 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14252 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры — в см.
|
Теоретическая механика |
3 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
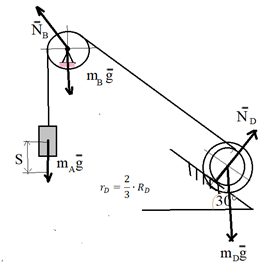
13818 |

Механическая система, состоящая из нескольких тел, под действием сил тяжести приходит в движение из состояния покоя. Учитывая трение скольжения тела А, пренебрегая другими силами сопротивления и массами нитей, предполагаемых нерастяжимыми, определить скорость тела А в тот момент, когда пройденный им путь станет равным S
Вариант 22.
Дано: MA =1 кг; MB = 2 кг; MD = 5 кг; RB = 0,30 м; RD = 0,15 м; ρDx = 0,12 м; α = 30°; S = 1,5 м;
Найти: vA = ?
|
Теоретическая механика |
K6-18 |
Теоретическая механика |
450₽ |
|
|
14424 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
9 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|