|
14242 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры — в см.
|
Теоретическая механика |
1 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14508 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н ). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
30 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14414 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
7 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14456 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
15 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14480 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
22 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14408 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
6 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14450 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
11 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14472 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
19 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14494 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
27 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
13818 |

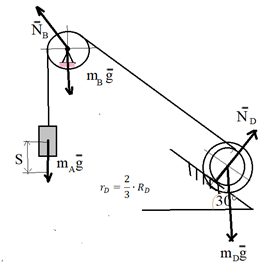
Механическая система, состоящая из нескольких тел, под действием сил тяжести приходит в движение из состояния покоя. Учитывая трение скольжения тела А, пренебрегая другими силами сопротивления и массами нитей, предполагаемых нерастяжимыми, определить скорость тела А в тот момент, когда пройденный им путь станет равным S
Вариант 22.
Дано: MA =1 кг; MB = 2 кг; MD = 5 кг; RB = 0,30 м; RD = 0,15 м; ρDx = 0,12 м; α = 30°; S = 1,5 м;
Найти: vA = ?
|
Теоретическая механика |
K6-18 |
Теоретическая механика |
450₽ |
|
|
14252 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры — в см.
|
Теоретическая механика |
3 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14424 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
9 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14464 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
17 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14484 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
24 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14238 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры — в см.
|
Теоретическая механика |
10 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14506 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
29 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14454 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
14 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14478 |

Горизонтальный вал весом G может вращаться в цилиндрических шарнирах А и В. К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F, пропорциональная N. На шкив 2 действуют силы натяжения ремней Т1 и T2. Груз Q висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала (в Н). Учесть веса шкивов P1, Р2, Р3. Все нагрузки действуют в вертикальной плоскости. Силы даны в Н, размеры - в см.
|
Теоретическая механика |
21 |
СПбГУСЭ. Теоретическая механика. Равновесие вала. 2012 год |
450₽ |
|
|
14650 |

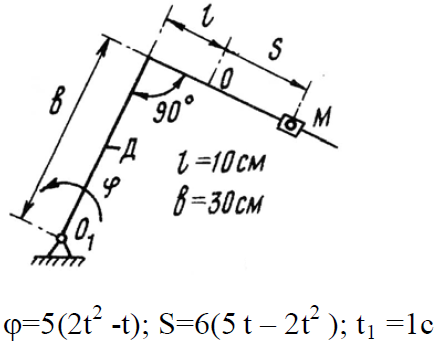
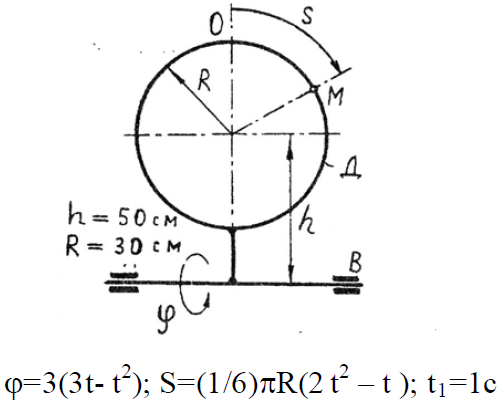
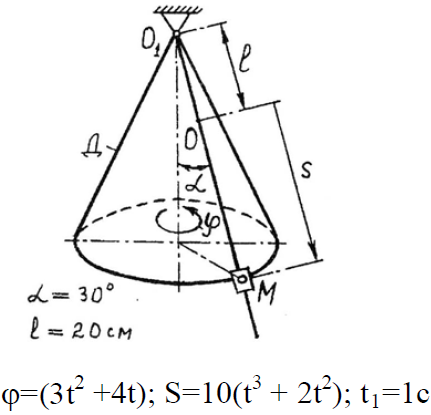
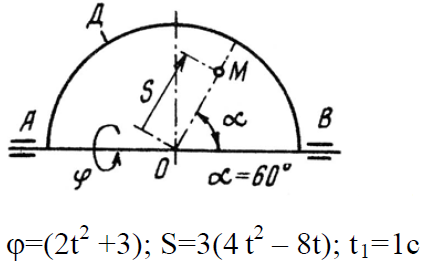
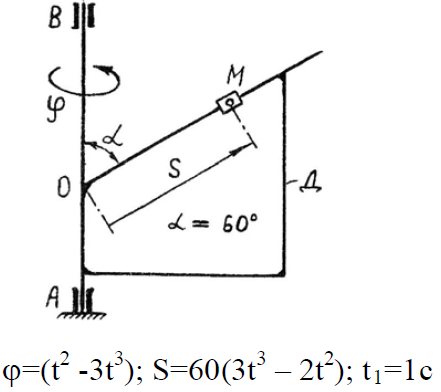
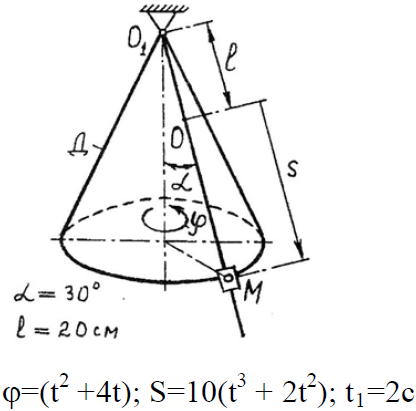
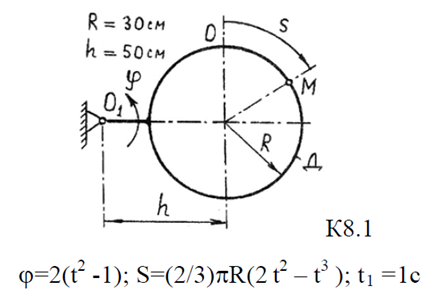
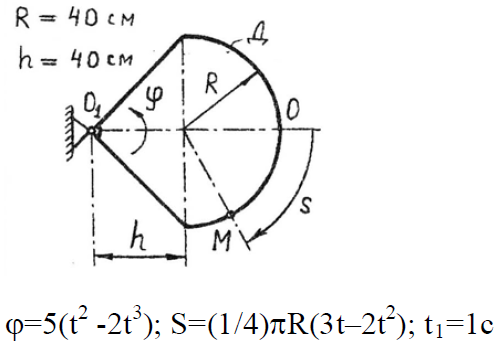
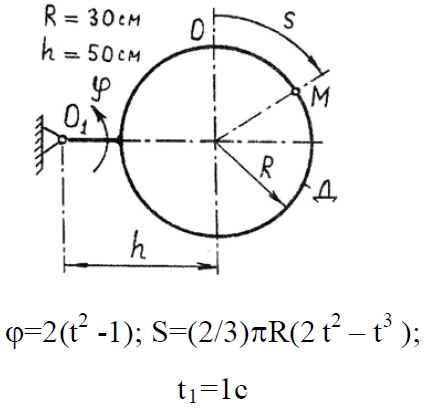
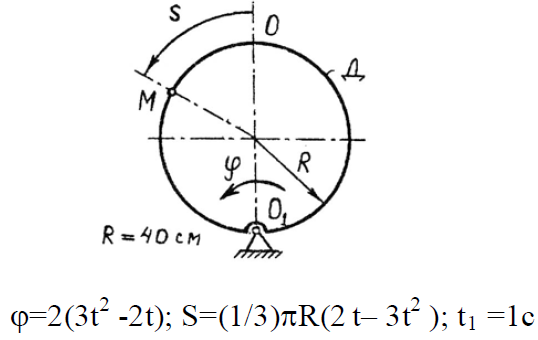
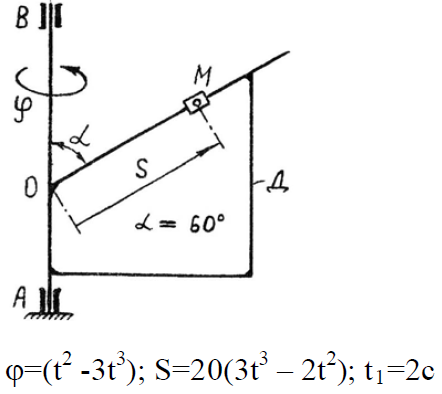
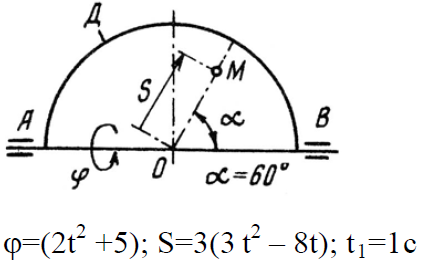
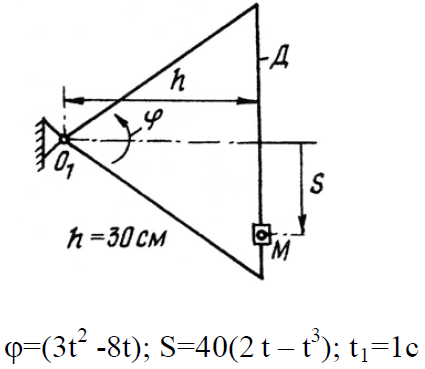
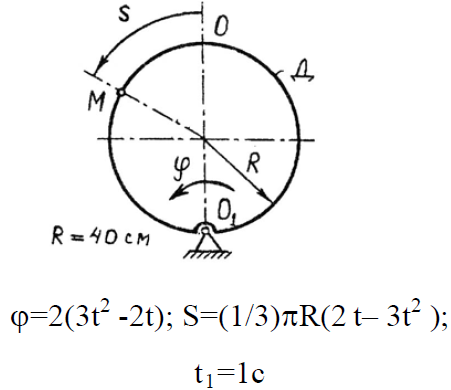
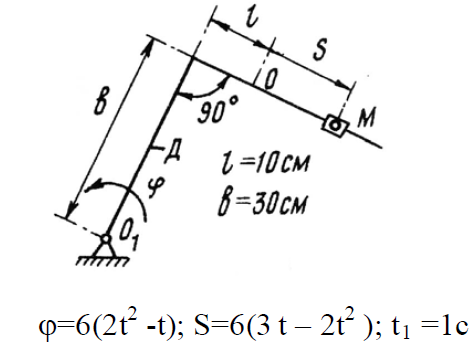
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
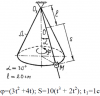
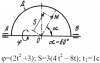
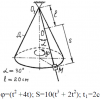
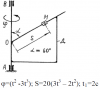
По заданным уравнениям относительного движения точки М и переносного движения тела Д определить для момента времени t = t1, абсолютную скорость и абсолютное ускорение точки М. Схемы механизмов и необходимые для расчета данные представлены на рис. К8.1 – К8.20.
|
Теоретическая механика |
K8.15 |
Теоретическая механика 2 |
500₽ |
|
|
14634 |

СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По заданным уравнениям относительного движения точки М и переносного движения тела Д определить для момента времени t = t1, абсолютную скорость и абсолютное ускорение точки М. Схемы механизмов и необходимые для расчета данные представлены на рис. К8.1 – К8.20.
|
Теоретическая механика |
K8.7 |
Теоретическая механика 2 |
500₽ |
|
|
14644 |
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По заданным уравнениям относительного движения точки М и переносного движения тела Д определить для момента времени t = t1, абсолютную скорость и абсолютное ускорение точки М. Схемы механизмов и необходимые для расчета данные представлены на рис. К8.1 – К8.20.
|
Теоретическая механика |
K8.12 |
Теоретическая механика 2 |
500₽ |
|
|
14660 |

СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По заданным уравнениям относительного движения точки М и переносного движения тела Д определить для момента времени t = t1, абсолютную скорость и абсолютное ускорение точки М. Схемы механизмов и необходимые для расчета данные представлены на рис. К8.1 – К8.20.
|
Теоретическая механика |
K8.20 |
Теоретическая механика 2 |
500₽ |
|
|
14628 |
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По заданным уравнениям относительного движения точки М и переносного движения тела Д определить для момента времени t = t1, абсолютную скорость и абсолютное ускорение точки М. Схемы механизмов и необходимые для расчета данные представлены на рис. К8.1 – К8.20.
|
Теоретическая механика |
K8.4 |
Теоретическая механика 2 |
500₽ |
|
|
16915 |

На рисунке изображён кривошипно-шатунный механизм.
Найти скорость и ускорение точек B и C методом полюса (графическим и аналитическим).
Найти дополнительно скорости точек B и C с помощью мгновенного центра скоростей (МЦС).
Построить исходный рисунок механизма, а также все графические решения (треугольник скоростей и многоугольник ускорений) в масштабе.
ωOA = 4 рад/с, εOA = 6 рад/с2, r = OA = 0,8 м, l = AB = 1,2 м, BC = 0,6 м, α = 30°
|
Теоретическая механика |
|
|
500₽ |
|
|
14638 |

СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По заданным уравнениям относительного движения точки М и переносного движения тела Д определить для момента времени t = t1, абсолютную скорость и абсолютное ускорение точки М. Схемы механизмов и необходимые для расчета данные представлены на рис. К8.1 – К8.20.
|
Теоретическая механика |
K8.9 |
Теоретическая механика 2 |
500₽ |
|
|
14654 |
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По заданным уравнениям относительного движения точки М и переносного движения тела Д определить для момента времени t = t1, абсолютную скорость и абсолютное ускорение точки М. Схемы механизмов и необходимые для расчета данные представлены на рис. К8.1 – К8.20.
|
Теоретическая механика |
K8.17 |
Теоретическая механика 2 |
500₽ |
|
|
14622 |

СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По заданным уравнениям относительного движения точки М и переносного движения тела Д определить для момента времени t = t1, абсолютную скорость и абсолютное ускорение точки М. Схемы механизмов и необходимые для расчета данные представлены на рис. К8.1 – К8.20.
|
Теоретическая механика |
K8.1 |
Теоретическая механика 2 |
500₽ |
|
|
14648 |

СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По заданным уравнениям относительного движения точки М и переносного движения тела Д определить для момента времени t = t1, абсолютную скорость и абсолютное ускорение точки М. Схемы механизмов и необходимые для расчета данные представлены на рис. К8.1 – К8.20.
|
Теоретическая механика |
K8.14 |
Теоретическая механика 2 |
500₽ |
|
|
14632 |

СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По заданным уравнениям относительного движения точки М и переносного движения тела Д определить для момента времени t = t1, абсолютную скорость и абсолютное ускорение точки М. Схемы механизмов и необходимые для расчета данные представлены на рис. К8.1 – К8.20.
|
Теоретическая механика |
K8.6 |
Теоретическая механика 2 |
500₽ |
|
|
14642 |

СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По заданным уравнениям относительного движения точки М и переносного движения тела Д определить для момента времени t = t1, абсолютную скорость и абсолютное ускорение точки М. Схемы механизмов и необходимые для расчета данные представлены на рис. К8.1 – К8.20.
|
Теоретическая механика |
K8.11 |
Теоретическая механика 2 |
500₽ |
|
|
14658 |

СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По заданным уравнениям относительного движения точки М и переносного движения тела Д определить для момента времени t = t1, абсолютную скорость и абсолютное ускорение точки М. Схемы механизмов и необходимые для расчета данные представлены на рис. К8.1 – К8.20.
|
Теоретическая механика |
K8.19 |
Теоретическая механика 2 |
500₽ |
|
|
14626 |

СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По заданным уравнениям относительного движения точки М и переносного движения тела Д определить для момента времени t = t1, абсолютную скорость и абсолютное ускорение точки М. Схемы механизмов и необходимые для расчета данные представлены на рис. К8.1 – К8.20.
|
Теоретическая механика |
K8.3 |
Теоретическая механика 2 |
500₽ |
|
|
14652 |
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По заданным уравнениям относительного движения точки М и переносного движения тела Д определить для момента времени t = t1, абсолютную скорость и абсолютное ускорение точки М. Схемы механизмов и необходимые для расчета данные представлены на рис. К8.1 – К8.20.
|
Теоретическая механика |
K8.16 |
Теоретическая механика 2 |
500₽ |
|
|
14636 |

СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По заданным уравнениям относительного движения точки М и переносного движения тела Д определить для момента времени t = t1, абсолютную скорость и абсолютное ускорение точки М. Схемы механизмов и необходимые для расчета данные представлены на рис. К8.1 – К8.20.
|
Теоретическая механика |
K8.8 |
Теоретическая механика 2 |
500₽ |
|
|
14646 |

СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По заданным уравнениям относительного движения точки М и переносного движения тела Д определить для момента времени t = t1, абсолютную скорость и абсолютное ускорение точки М. Схемы механизмов и необходимые для расчета данные представлены на рис. К8.1 – К8.20.
|
Теоретическая механика |
K8.13 |
Теоретическая механика 2 |
500₽ |
|
|
14630 |

СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По заданным уравнениям относительного движения точки М и переносного движения тела Д определить для момента времени t = t1, абсолютную скорость и абсолютное ускорение точки М. Схемы механизмов и необходимые для расчета данные представлены на рис. К8.1 – К8.20.
|
Теоретическая механика |
K8.5 |
Теоретическая механика 2 |
500₽ |
|
|
14640 |

СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По заданным уравнениям относительного движения точки М и переносного движения тела Д определить для момента времени t = t1, абсолютную скорость и абсолютное ускорение точки М. Схемы механизмов и необходимые для расчета данные представлены на рис. К8.1 – К8.20.
|
Теоретическая механика |
K8.10 |
Теоретическая механика 2 |
500₽ |
|
|
14656 |

СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По заданным уравнениям относительного движения точки М и переносного движения тела Д определить для момента времени t = t1, абсолютную скорость и абсолютное ускорение точки М. Схемы механизмов и необходимые для расчета данные представлены на рис. К8.1 – К8.20.
|
Теоретическая механика |
K8.18 |
Теоретическая механика 2 |
500₽ |
|
|
14624 |

СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
По заданным уравнениям относительного движения точки М и переносного движения тела Д определить для момента времени t = t1, абсолютную скорость и абсолютное ускорение точки М. Схемы механизмов и необходимые для расчета данные представлены на рис. К8.1 – К8.20.
|
Теоретическая механика |
K8.2 |
Теоретическая механика 2 |
500₽ |
|